实际操作时TI编码器例程M法测速时基速(Base_Speed)如何确定
在TI提供的编码器M法测速时,设编码器位1000线程,有公式speed=Base_Speed*(x2-x1)/
在TI提供的编码器M法测速时,设编码器位1000线程,有公式speed=Base_Speed*(x2-x1)/
在c6000中有一个计数器TSCL其用来计算执行程序的时间,但是我在c2000中并没找到,请问c2000是否存
谢谢各位了Susan Yang:目前给出的例程都是基于FLASH API的关于它的使用,您可以参考一下TMS3
你好,在TI资料看到“C2000+TMS570” 双芯片方案在汽车电驱动功能安全的方案

问题是重复定义,但是一个定义在.c文件中,一个定义在.asm文件中,这样也不可以吗 user5759960:
采用滑膜估算的角度和实际的角度总是有相位差,请问如何解决?Green Deng:可以参考一下这个帖子: e2e
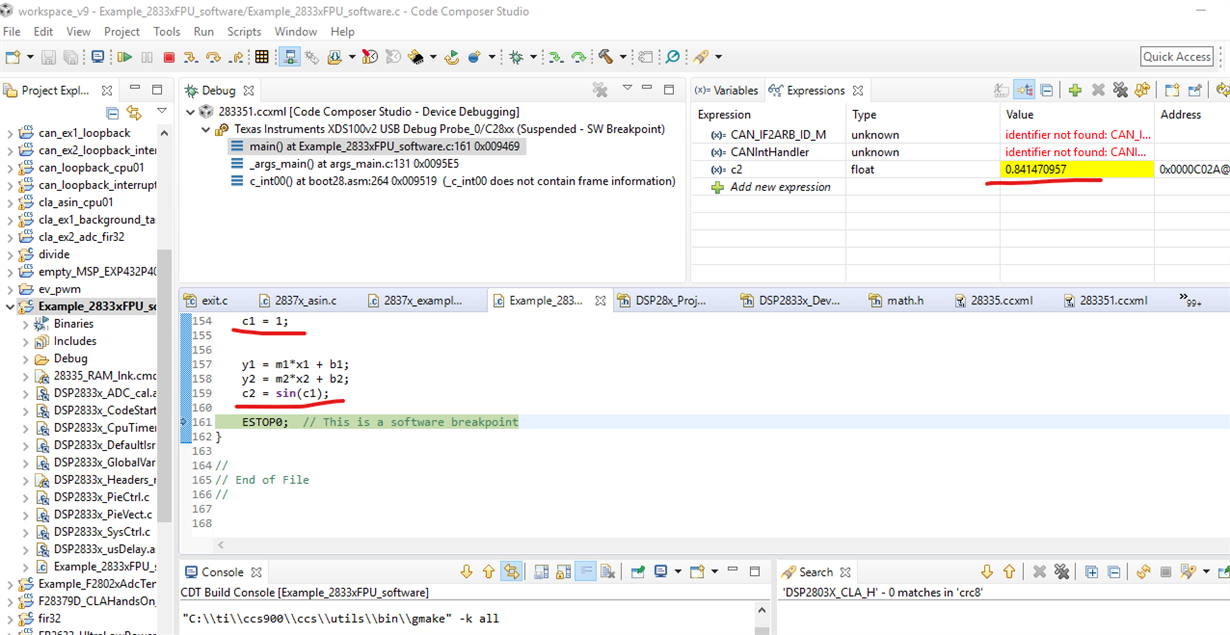
你好!我有相关问题请教一下。 我采用rts2800_fpu32.lib浮点FPU支持库进行正弦函数的使用。ds
TI的永磁同步电机无位置传感器的控制策略的资料在哪啊,我记得是滑膜观测器实现的,主要是想学习其原理和算法实现,
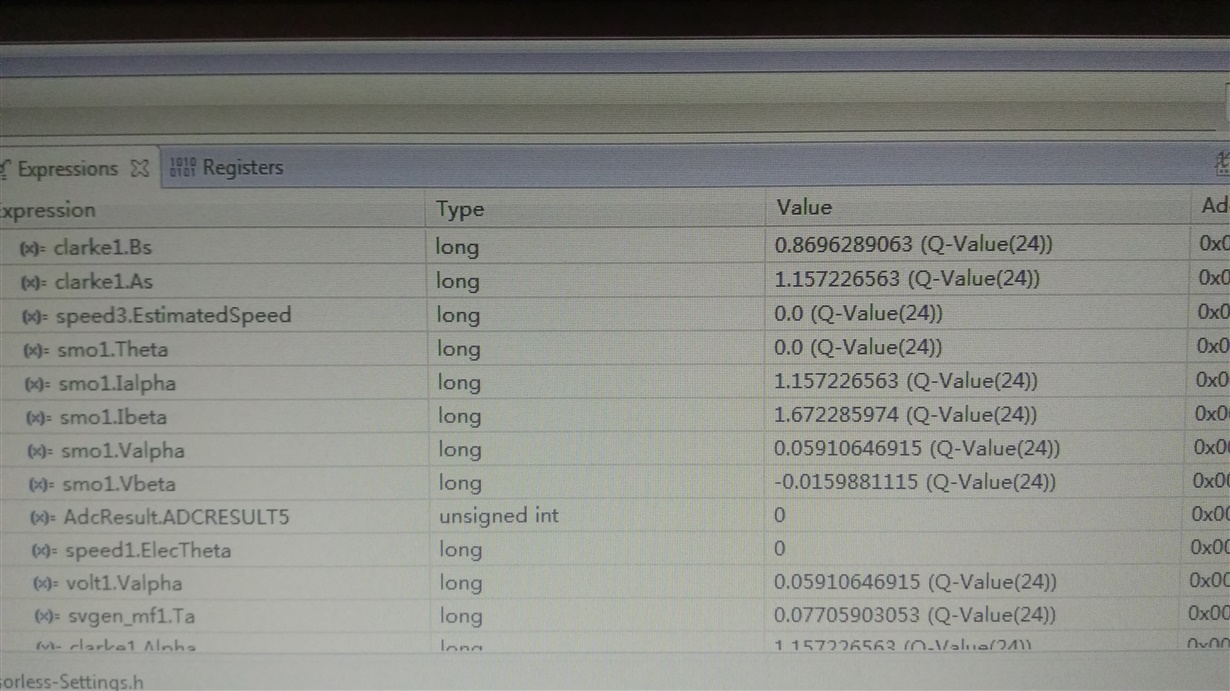
SMO四个输入都有显示,RS LS BASE VOLTAGE, BASE CURRENT也都有设定值,但为什么
头文件如下: #ifndef __SPEED_PR_H__#define __SPEED_PR_H__ typ