自己做的硬件电路和电机算法
FOC算法开关频率为5KHz
发现算法运行时示波器观测的电流传感器输出噪声很多,但是FOC算法运行是没有问题的
FOC算法里对采集的数据我做了滤波处理,但觉得示波器观测到如此多的毛刺、尖峰,觉得再怎么滤波也会对电机运行产生影响啊,
我不相信我的滤波和FOC算法做的那么好。
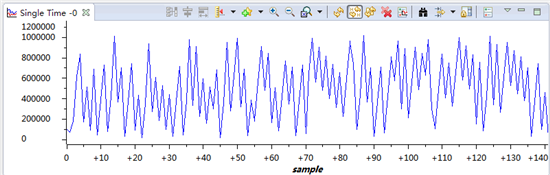
图1.这是在额定电压下调压器输出220VAC,运行FOC算法,转速设定800RPM时,示波器Stop截得的一张波形,可以看到,噪声很严重

图2.这是在额定电压下,运行FOC算法,转速设定800RPM时,示波器动态运行拍得的一张片

图3.即便是在调压器输出为0的时候,运行FOC算法,就可以观测到噪声了,可以看出噪声似乎不是固定频率

图4.时间轴拉开以后观测

为什么如此多的噪声电机运行却很稳定,不太理解,请大家帮我想想,多谢!
图5.上位软件截图,他励直流有刷电机转速电流双闭环算法,转速噪声严重导致转速采集异常进一步导致电机运行状态的改变
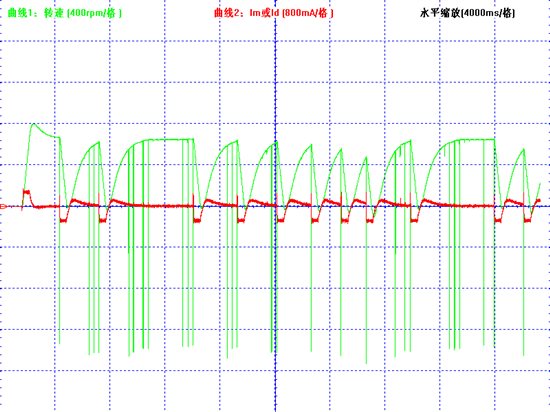
上面这张图是我用上位机软件控制时,从软件截取的一张直流有刷电动机转速电流双闭环算法的曲线图,绿色的是转速,红色的是母线电流,首先要说明的是我的硬件平台有问题,造成高压以后转速采集有突变,同样是设定800rpm,额定电压下,大家看到的电流负向突变时因为算法中反馈转速突变,外环PI控制器最用的结果,本来设定为800,突然检测到负值,造成控制上的变化。转速我也做了一个滤波,所以并不是每次反馈转速的突变都会造成控制异常,如此看来,电流的突变应该会鼠笼机的FOC有影响,但实际电机运行却是没有问题的,很稳定。贴上这个图是为了对比说明一下。
还有一个问题是,我的这套环境里,2812的串口加了一颗串口转USB芯片CH340,自己做了一套上位机软件,发现三相鼠笼机、永磁同步机、直流无刷机这三种电机配合上位机软件使用都没有问题,只有运行他励直流有刷电机的时候,发现调压器输出电压加高了以后会导致CH340的设备驱动丢失,从windows的设备管理器里可以看出来,这是为什么呢?是因为直流有刷电机要加个220V励磁电源,所以干扰大吗?若如此,如何解决呢?
下面放上我的调试环境图:


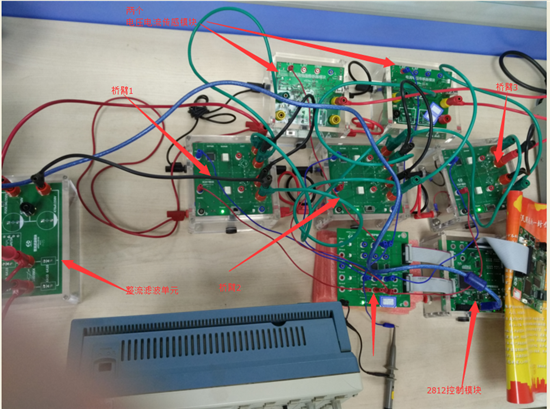
阴线比较多,也比较长,强电弱点交织在一起,这个结构不好
或许电机控制单元这种打散的结构本身就不合理吧
目前调试OK的电机种类和算法是:
1.ACI:SPWM(同步调制、异步调制、混合调制)、SVPWM(同步调制、异步调制、混合调制)、FOC
2.BLDC(Brush-Less DC):ASR+ACR
3.PMSM:FOC
直流有刷电机对应的3种算法其实也调试完了,在之前另外一套整合结构下调试的,不是现在这种打散的结构,当初考虑是为了灵活,所以就打散了。
4.BDC(Brush-DC):openloop、ASR、ASR+ACR
这些算法坐在一棵2812里,有套通讯协议做电机算法选择、转速设定、以及和上位机之间的数据交互。
Young Hu:
示波器探头会引入干扰的,所以示波器显示的波形与实际的波形可能都不一样。而且采样都是在下桥臂导通的时候。