各位大神,我在学习滑动模态观测器计算转子位置,看了“多轴PFC”开发板的例程,下面是技术文档中的一页:
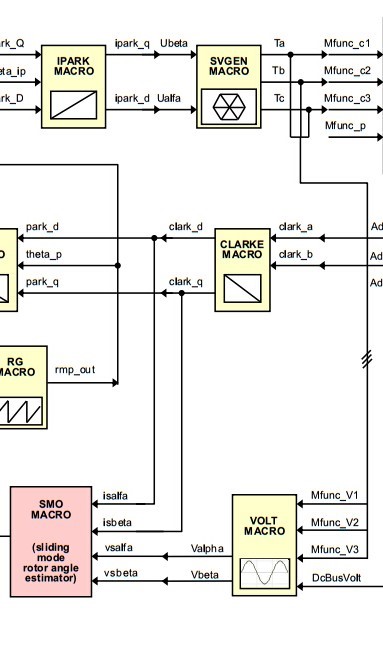
滑模估算转子位置模块需要的输入有相电压估算法得到的两相静止电压,但是上面的Ipark模块计算得到的就是两相静止电压,为什么还要再利用相电压估算模块再计算一次呢?二者有什么不不同吗?非常感谢!!!
Eric Ma:
上面的PARK模块是针对电流的。
ERIC
各位大神,我在学习滑动模态观测器计算转子位置,看了“多轴PFC”开发板的例程,下面是技术文档中的一页:
滑模估算转子位置模块需要的输入有相电压估算法得到的两相静止电压,但是上面的Ipark模块计算得到的就是两相静止电压,为什么还要再利用相电压估算模块再计算一次呢?二者有什么不不同吗?非常感谢!!!
xu zhang11:
回复 Eric Ma:
谢谢您的回复,您是说上面的IPark模块输出的是两相静止电流吗?如果是这样的话,SVGEN的输入需要的是电压,这样是怎么转化的呢?我看程序没有响应的转化啊。





