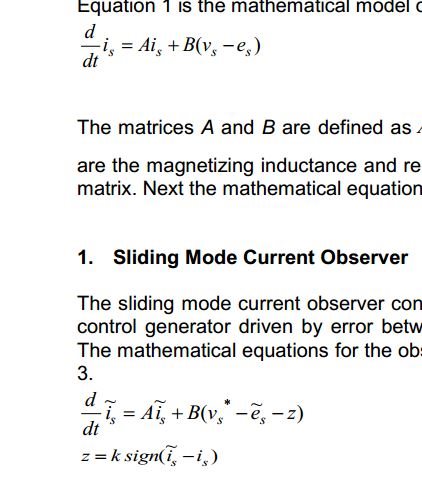
上图是SMO模块的解释文档,按照滑模观测器的理论,电流观测器的模型不因该是di/dt=Ai+B(v-z)吗?这样的话,电流观测误差趋向0的时候z=e,对z滤波就能获得e的观测值。
为什么程序中的观测器是di/dt=Ai+B(v-e-z),按照IT的程序,当电流观测误差趋向0的时候岂不是变成了e+z=e,这样对z滤波还能等于反电动势吗??
user4755574:这个校正因子我也不太理解,希望这里能得到解答,谢谢。
上图是SMO模块的解释文档,按照滑模观测器的理论,电流观测器的模型不因该是di/dt=Ai+B(v-z)吗?这样的话,电流观测误差趋向0的时候z=e,对z滤波就能获得e的观测值。
为什么程序中的观测器是di/dt=Ai+B(v-e-z),按照IT的程序,当电流观测误差趋向0的时候岂不是变成了e+z=e,这样对z滤波还能等于反电动势吗??
user5660142:有 没有工程师解答这个问题,我也不懂





