关于过调制问题,有几个疑惑:
1、Ti的基本例程里面,是以Udc/sqrt(3)作为电压基准值,在计算向量作用时间的时候,没有看到相关过调制算法。
问题:Ti的算法是本身不需要过调制,还是就没有加入过调制算法?
2.在一些文献中看到的过调制算法中,有的文献提到“六步阶波输出的相电压基波峰值是(2/pi)*Udc”。
问题:这里的(2/pi)*Udc是怎么计算的,没有搞明白。
3.将电压基准值修改为Udc的时候,加入过调制,可以提高电机最高速度,但是电机噪声很大。
问题:噪声是因为什么原因?
为什么电压基准值修改为Udc的时候可以提高速度?这样做好不?
问题有点多,就一次性列出了,有知道的请不吝赐教,非常感谢
zdc:
回复 Hardy Zhou:
1.附件是关于六步阶波的文献。
2.电流采样使用的电流互感器,就是提高电压基准值之后,高速有噪声。
3.关于您说的提高过调系数,这个在哪个地方调节,不知能否给个简要说明。
4.MotorWare里面过调制的章节,能否说个大概位置。
谢谢!
关于过调制问题,有几个疑惑:
1、Ti的基本例程里面,是以Udc/sqrt(3)作为电压基准值,在计算向量作用时间的时候,没有看到相关过调制算法。
问题:Ti的算法是本身不需要过调制,还是就没有加入过调制算法?
2.在一些文献中看到的过调制算法中,有的文献提到“六步阶波输出的相电压基波峰值是(2/pi)*Udc”。
问题:这里的(2/pi)*Udc是怎么计算的,没有搞明白。
3.将电压基准值修改为Udc的时候,加入过调制,可以提高电机最高速度,但是电机噪声很大。
问题:噪声是因为什么原因?
为什么电压基准值修改为Udc的时候可以提高速度?这样做好不?
问题有点多,就一次性列出了,有知道的请不吝赐教,非常感谢
zdc:
回复 Hardy Zhou:
本来回复了,不知道怎么没有通过审核。
1.motorware过调制的相关类容在哪个位置,不知道方便告知下不。
2.电流采样使用的是电流互感器,三相斗采集了,就是提高基准电压之后,高速时有噪声。
3.关于提高过调系数,不知能否给个简要的例子说明。
谢谢!
关于过调制问题,有几个疑惑:
1、Ti的基本例程里面,是以Udc/sqrt(3)作为电压基准值,在计算向量作用时间的时候,没有看到相关过调制算法。
问题:Ti的算法是本身不需要过调制,还是就没有加入过调制算法?
2.在一些文献中看到的过调制算法中,有的文献提到“六步阶波输出的相电压基波峰值是(2/pi)*Udc”。
问题:这里的(2/pi)*Udc是怎么计算的,没有搞明白。
3.将电压基准值修改为Udc的时候,加入过调制,可以提高电机最高速度,但是电机噪声很大。
问题:噪声是因为什么原因?
为什么电压基准值修改为Udc的时候可以提高速度?这样做好不?
问题有点多,就一次性列出了,有知道的请不吝赐教,非常感谢
Hardy Zhou:
回复 zdc:
登录以下网址下载motor最新版本,里面有过调制的lab例程
http://www.ti.com/tool/MOTORWARE?keyMatch=motorware&tisearch=Search-EN-Everything
关于过调制问题,有几个疑惑:
1、Ti的基本例程里面,是以Udc/sqrt(3)作为电压基准值,在计算向量作用时间的时候,没有看到相关过调制算法。
问题:Ti的算法是本身不需要过调制,还是就没有加入过调制算法?
2.在一些文献中看到的过调制算法中,有的文献提到“六步阶波输出的相电压基波峰值是(2/pi)*Udc”。
问题:这里的(2/pi)*Udc是怎么计算的,没有搞明白。
3.将电压基准值修改为Udc的时候,加入过调制,可以提高电机最高速度,但是电机噪声很大。
问题:噪声是因为什么原因?
为什么电压基准值修改为Udc的时候可以提高速度?这样做好不?
问题有点多,就一次性列出了,有知道的请不吝赐教,非常感谢
Hardy Zhou:
回复 zdc:
2.电流采样使用的电流互感器,就是提高电压基准值之后,高速有噪声。
电机控制的过调制不是改变电压基准,不知道你的控制代码是自己写的还是参考TI例程写的,如果是参考TI的例程写的,过调制是在电流环的输出作了控制,具体参考Motorware例程, Id控制的输出是Vdout(限幅在调制系数Km以内),Iq控制的输出是Vqout(限制在 sqrt(Km^2-Vdout^2)以内)
同时关注下电流采样是否有异常.
3.关于您说的提高过调系数,这个在哪个地方调节,不知能否给个简要说明。
参考Motorware 例程
关于过调制问题,有几个疑惑:
1、Ti的基本例程里面,是以Udc/sqrt(3)作为电压基准值,在计算向量作用时间的时候,没有看到相关过调制算法。
问题:Ti的算法是本身不需要过调制,还是就没有加入过调制算法?
2.在一些文献中看到的过调制算法中,有的文献提到“六步阶波输出的相电压基波峰值是(2/pi)*Udc”。
问题:这里的(2/pi)*Udc是怎么计算的,没有搞明白。
3.将电压基准值修改为Udc的时候,加入过调制,可以提高电机最高速度,但是电机噪声很大。
问题:噪声是因为什么原因?
为什么电压基准值修改为Udc的时候可以提高速度?这样做好不?
问题有点多,就一次性列出了,有知道的请不吝赐教,非常感谢
Hardy Zhou:
回复 Hardy Zhou:
六脉冲的基波是Udc*2/pi
你可以找找资料使用FFT推导下,一个正弦周期只有六个脉冲表示的情况下,基波幅值就是Udc*2/pi
百度上找的比较多的是方波的基波幅值是Udc4/pi,都有推导例程.
六脉冲基波的幅值就表示了在最大过调制的情况下,能得到的正弦波基波的最大峰值,也就是系统输出的最大正弦波幅值.
关于过调制问题,有几个疑惑:
1、Ti的基本例程里面,是以Udc/sqrt(3)作为电压基准值,在计算向量作用时间的时候,没有看到相关过调制算法。
问题:Ti的算法是本身不需要过调制,还是就没有加入过调制算法?
2.在一些文献中看到的过调制算法中,有的文献提到“六步阶波输出的相电压基波峰值是(2/pi)*Udc”。
问题:这里的(2/pi)*Udc是怎么计算的,没有搞明白。
3.将电压基准值修改为Udc的时候,加入过调制,可以提高电机最高速度,但是电机噪声很大。
问题:噪声是因为什么原因?
为什么电压基准值修改为Udc的时候可以提高速度?这样做好不?
问题有点多,就一次性列出了,有知道的请不吝赐教,非常感谢
zdc:
回复 Hardy Zhou:
Hi Hardy:
谢谢您的讲解!
我是参考Ti例程来写的,如果我以Udc/sqrt(3)为基准电压,调制系数设置为Km的话,有几个问题想再问下:
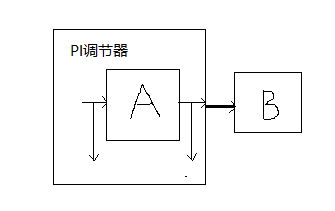
1. Iq的输出限制 sqrt(Km^2-Vdout^2),这个在下图A处还是B处?A处属于PI调节器内部限制输出,有积分抗饱和;B属于
PI调节器外部。
2.如果进入弱磁控制,应该是Ud^2+Uq^2和Km^2大小吧?非标幺化处理里面,都是比较Ud^2+Uq^2和Udc/sqrt(3)(Udc/sqrt(3))^2。
谢谢!
关于过调制问题,有几个疑惑:
1、Ti的基本例程里面,是以Udc/sqrt(3)作为电压基准值,在计算向量作用时间的时候,没有看到相关过调制算法。
问题:Ti的算法是本身不需要过调制,还是就没有加入过调制算法?
2.在一些文献中看到的过调制算法中,有的文献提到“六步阶波输出的相电压基波峰值是(2/pi)*Udc”。
问题:这里的(2/pi)*Udc是怎么计算的,没有搞明白。
3.将电压基准值修改为Udc的时候,加入过调制,可以提高电机最高速度,但是电机噪声很大。
问题:噪声是因为什么原因?
为什么电压基准值修改为Udc的时候可以提高速度?这样做好不?
问题有点多,就一次性列出了,有知道的请不吝赐教,非常感谢
Figo Qiao:
回复 Hardy Zhou:
你好! Hardy
看到TI 关于过调制的例程,主要是针对3个单电阻采样模式的采样电流进行处理,
我们现在的问题:如果使用两个霍尔传感器采样相电流,如何进行过调制的处理呢?我的理解是霍尔传感器不像单电阻受下桥臂开通时间影响,都可以采样到有效的信号,因此不需要currents reconstruction、ignore shunt 这两个步骤,对吗?
希望能得到你的帮助,谢谢!





