如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1–Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
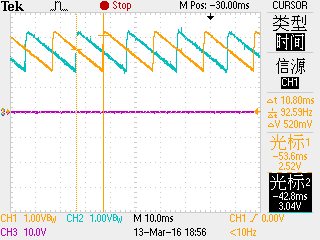
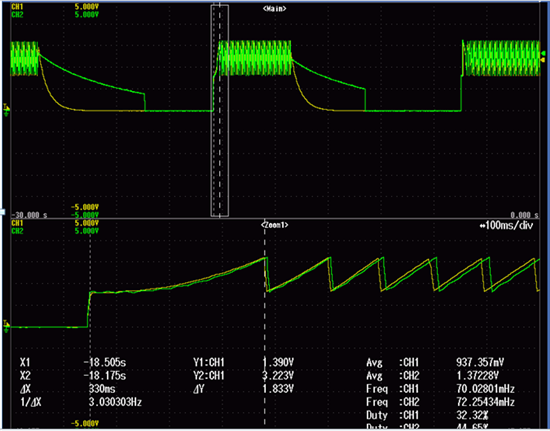 角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
lv YB:
另外在开环阶段,给定交轴电流iqref=_IQ(0.08),基值电流为20.625A,而切换到去传感闭环阶段时,不仅角度要克服rg1.Out到smo1.Theta的偏差,交轴给定电流也会由iqref=_IQ(0.08)变为iqref=pid1_spd.term.Out,两者都跳变是不是对电机切换到无传感转速闭环也有影响?如何克服?
如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1–Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
lv YB:
有TI员工能帮忙解答一下吗,或者谁做过这个,能给点建议?
如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1–Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
Young Hu:
回复 lv YB:
您好!
可以让转速再提高一下切换,随着转速的上升,反馈信号也变强烈,这样估算的角度相应的也是比较准的。
另外,先不用管速度环,先把电流环的切换弄好。
如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1–Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
lv YB:
回复 Young Hu:
那就是要先调试level–>6B阶段,让iqref一直为恒定值,然后调试smo1.Kslide和smo1.Kslf两个参数,保证开环阶段能先切换成功?想做风机控制的,如果想在100多RPM切换的话,有可能吗?
如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1–Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
Young Hu:
回复 lv YB:
对,先把估算器给调好了。几对极的电机?
如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1–Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
lv YB:
回复 Young Hu:
4对极的。刚刚试了一下,调了一下smo1.kslf参数,开环的时候,正反转都能切换了。但是变到level6A后,只有给定正向转速指令,开环到闭环旋转能切换成功,反向转速指令切换就会失败,什么会导致这个原因呢?
如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1–Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
Young Hu:
回复 lv YB:
是不是切换点的变量设定?正向反向从本质上没有区别。
如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1–Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
lv YB:
回复 Young Hu:
我是在估算角度与开环角度基本一致的情况下开始切换到闭环的。通过设置一个电平信号观察切换点好像发现了问题所在。
我在开环阶段,给定交轴参考电流iqref=_IQ(0.1),当正向闭环切换的时候,交轴电流变成了经过速度环PI输出的pid1_spd.term.Out,因为给定速度参考值为正,所以速度PI输出为正。交轴电流从正的给定值_IQ(0.1)切换到正的速度环PI输出的pid1_spd.term.Out跳变不是太大,虽然会影响估算的角度,但是角度计算仍可以顺利进行,切换成功。切换图如下:
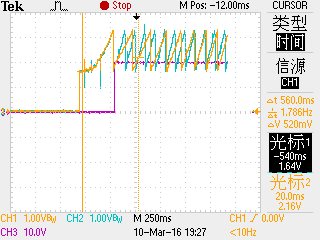 黄色估算角度,蓝色开环角度,粉色是跳变点。
黄色估算角度,蓝色开环角度,粉色是跳变点。
而在反向闭环切换的时候,交轴电流从正的给定值_IQ(0.1)切换到负的速度环PI输出的pid1_spd.term.Out跳变过大,导致估算角度出现误差,电机停转,切换失败。如下图:
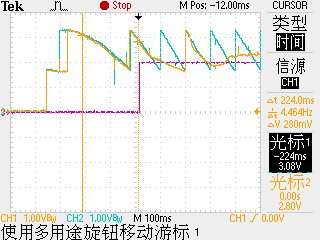 切换点之后,黄色估算角度明显出现了异常。
切换点之后,黄色估算角度明显出现了异常。
问题是,我该如何避免此种状况呢?是在进行反向切换控制计算的时候开环阶段就用iqref=-_IQ(某值)吗?
如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1–Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
lv YB:
回复 Young Hu:
你好,我在调试的时候发现了一个新的问题。为了验证我的smo.Kslide和smo1.Kslf参数调试的是否正确。我把QEP计算单元也引入到控制中。在经过最初的角度校正之后,我使用了QEP.Theta做角度变换,然后直轴电流恒定为0,交轴电流为经过速度PI调节输出的pid1_spd.term.Out,去做真实电机角度控制的恒转速闭环控制。与此同时,SMO估算单元一同进行,同时对比观察QEP.Theta和SMO1.Theta是否一致。在给定正向转速指令SpeedRef=_IQ(0.25)之后,电机正向旋转,输出的QEP.Theta和SMO1.Theta如下图所示,两者基本一致,证明估算角度是对的,也就是我可以实现正向无传感开环到闭环控制的。
 其中,黄色为SMO1.Theta,蓝色为QEP.Theta。
其中,黄色为SMO1.Theta,蓝色为QEP.Theta。
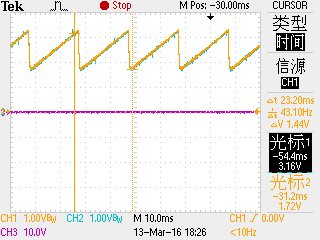
但是当使用同一组smo.Kslide和smo1.Kslf参数进行闭环控制时,给定反向转速指令SpeedRef=_IQ(-0.25)之后,电机反向旋转,输出的QEP.Theta和SMO1.Theta如下图所示,两者相差接近180度,证明估算角度与真实QEP角度是由差别的,也就是我不可以实现反向无传感开环到闭环控制。基本与我上一条回复的情况一致。
 其中,黄色为SMO1.Theta,蓝色为QEP.Theta。
其中,黄色为SMO1.Theta,蓝色为QEP.Theta。
为什么同样一组smo.Kslide和smo1.Kslf参数,电机正反转时,两种角度会差别这么大呢?难道正反转的时候,需要不同的smo.Kslide和smo1.Kslf参数?
求解答,谢谢。
如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1–Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
Young Hu:
回复 lv YB:
lv YB
我是在估算角度与开环角度基本一致的情况下开始切换到闭环的。通过设置一个电平信号观察切换点好像发现了问题所在。
我在开环阶段,给定交轴参考电流iqref=_IQ(0.1),当正向闭环切换的时候,交轴电流变成了经过速度环PI输出的pid1_spd.term.Out,因为给定速度参考值为正,所以速度PI输出为正。交轴电流从正的给定值_IQ(0.1)切换到正的速度环PI输出的pid1_spd.term.Out跳变不是太大,虽然会影响估算的角度,但是角度计算仍可以顺利进行,切换成功。切换图如下:
黄色估算角度,蓝色开环角度,粉色是跳变点。
而在反向闭环切换的时候,交轴电流从正的给定值_IQ(0.1)切换到负的速度环PI输出的pid1_spd.term.Out跳变过大,导致估算角度出现误差,电机停转,切换失败。如下图:
切换点之后,黄色估算角度明显出现了异常。
问题是,我该如何避免此种状况呢?是在进行反向切换控制计算的时候开环阶段就用iqref=-_IQ(某值)吗?





