我需要用McBSP配置成SPI,用来与W5500通讯,但是中间有个波特率不知道怎配,请大家指点!
Susan Yang:
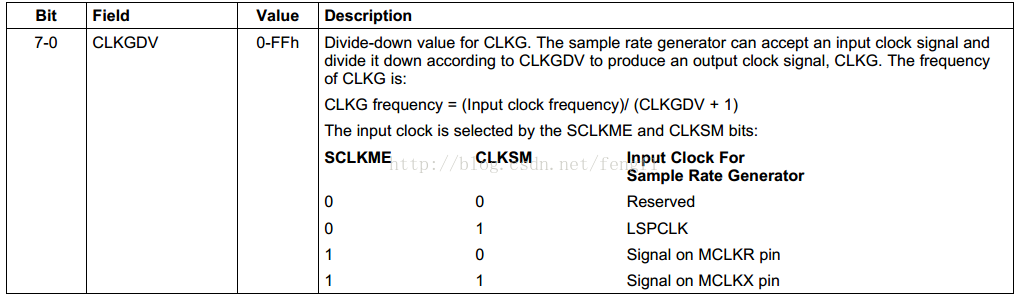
传输波特率是由CLKGDV决定,它是一个CLKG的分频数值,从0到255.
您可以看一下
另外我们有相关的例程,您可以看一下
//###########################################################################
// Description:
//! \addtogroup f2833x_example_list
//! <h1>McBSP Digital Loop Back using SPI Mode (mcbsp_spi_loopback)</h1>
//!
//! This program will execute and transmit words until terminated by the user.
//!
//! By default for the McBSP examples, the McBSP sample rate generator (SRG) input
//! clock frequency is LSPCLK (150E6/4 or 100E6/4) assuming SYSCLKOUT = 150 MHz or
//! 100 MHz respectively.If while testing, the SRG input frequency
//! is changed, the #define MCBSP_SRG_FREQ(CPU_SPD/4) in the Mcbsp.c file must
//! also be updated accordingly.This define is used to determine the Mcbsp initialization
//! delay after the SRG is enabled, which must be at least 2 SRG clock cycles.
//!
//! \b Watch \b Variables \n
//! - sdata1
//! - sdata2
//! - rdata1
//! - rdata2
//
//
//###########################################################################
// $TI Release: F2833x/F2823x Header Files and Peripheral Examples V142 $
// $Release Date: November1, 2016 $
// $Copyright: Copyright (C) 2007-2016 Texas Instruments Incorporated -
//http://www.ti.com/ ALL RIGHTS RESERVED $
//############################################################################include "DSP28x_Project.h"// Device Headerfile and Examples Include File// Prototype statements for functions found within this file.void init_mcbsp_spi(void);
void mcbsp_xmit(int a, int b);
void error(void);// Global data for this example
Uint16 sdata1 = 0x000;// Sent Data
Uint16 rdata1 = 0x000;// Received DataUint16 sdata2 = 0x000;// Sent Data
Uint16 rdata2 = 0x000;// Received Datavoid main(void)
{
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the DSP2833x_SysCtrl.c file.InitSysCtrl();// Step 2. Initialize GPIO:
// This example function is found in the DSP2833x_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
// InitGpio();// Skipped for this example
// For this example, only enable the GPIO for McBSP-AInitMcbspaGpio();// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interruptsDINT;// Initialize PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the DSP2833x_PieCtrl.c file.InitPieCtrl();// Disable CPU interrupts and clear all CPU interrupt flags:IER = 0x0000;IFR = 0x0000;// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example.This is useful for debug purposes.
// The shell ISR routines are found in DSP2833x_DefaultIsr.c.
// This function is found in DSP2833x_PieVect.c.InitPieVectTable();// Step 4. Initialize all the Device Peripherals:
// This function is found in DSP2833x_InitPeripherals.c
// InitPeripherals();// Not required for this example// Step 5. User specific code,init_mcbsp_spi();sdata1 = 0x55aa;sdata2 = 0xaa55;// Main loop to transfer 32-bit words through MCBSP in SPI mode periodicallyfor(;;){mcbsp_xmit(sdata1,sdata2);while( McbspaRegs.SPCR1.bit.RRDY == 0 ) {}// Master waits until RX data is readyrdata2 = McbspaRegs.DRR2.all;// Read DRR2 first.rdata1 = McbspaRegs.DRR1.all;// Then read DRR1 to complete receiving of dataif((rdata2 != sdata2)&&(rdata1 != sdata1)) error( ); // Check that correct data is received.delay_loop();sdata1^=0xFFFF;sdata2^=0xFFFF;__asm("nop");// Good place for a breakpoint}
}// Some Useful local functions
void error(void)
{__asm("ESTOP0");// test failed!! Stop!for (;;);
}void init_mcbsp_spi()
{// McBSP-A register settingsMcbspaRegs.SPCR2.all=0x0000;// Reset FS generator, sample rate generator & transmitterMcbspaRegs.SPCR1.all=0x0000;// Reset Receiver, Right justify word, Digital loopback dis.McbspaRegs.PCR.all=0x0F08;//(CLKXM=CLKRM=FSXM=FSRM= 1, FSXP = 1)McbspaRegs.SPCR1.bit.DLB = 1;McbspaRegs.SPCR1.bit.CLKSTP = 2;// Together with CLKXP/CLKRP determines clocking schemeMcbspaRegs.PCR.bit.CLKXP = 0;// CPOL = 0, CPHA = 0 rising edge no delayMcbspaRegs.PCR.bit.CLKRP = 0;McbspaRegs.RCR2.bit.RDATDLY=01;// FSX setup time 1 in master mode. 0 for slave mode (Receive)McbspaRegs.XCR2.bit.XDATDLY=01;// FSX setup time 1 in master mode. 0 for slave mode (Transmit)McbspaRegs.RCR1.bit.RWDLEN1=5;// 32-bit wordMcbspaRegs.XCR1.bit.XWDLEN1=5;// 32-bit wordMcbspaRegs.SRGR2.all=0x2000;// CLKSM=1, FPER = 1 CLKG periodsMcbspaRegs.SRGR1.all= 0x000F;// Frame Width = 1 CLKG period, CLKGDV=16McbspaRegs.SPCR2.bit.GRST=1;// Enable the sample rate generatordelay_loop();// Wait at least 2 SRG clock cyclesMcbspaRegs.SPCR2.bit.XRST=1;// Release TX from ResetMcbspaRegs.SPCR1.bit.RRST=1;// Release RX from ResetMcbspaRegs.SPCR2.bit.FRST=1;// Frame Sync Generator reset
}void mcbsp_xmit(int a, int b)
{McbspaRegs.DXR2.all=b;McbspaRegs.DXR1.all=a;
}//===========================================================================
// No more.
//===========================================================================