你好,我最近在研究永磁同步电机的无速度传感器控制方法,从Digital Motor Control Software Lirary:Target Independent Math Blocks V13.1手册的SMO模块估计反电动势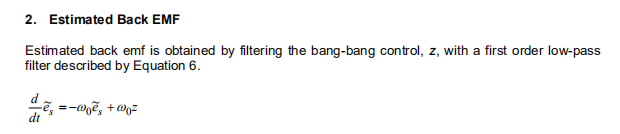
来自HVPM Sensorless->smopos.h程序中也印证了这一理论,

但是我参考了一些文献,估计反电动势都是
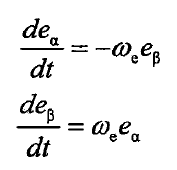
请问是哪里出了问题,目前我程序还没有在电机上运行,尚不清楚正确性,有人可以解释为什么反电动势动态方程不一样吗?
Green Deng:可以参考一下这个帖子的说明:
e2echina.ti.com/…/382589
你好,我最近在研究永磁同步电机的无速度传感器控制方法,从Digital Motor Control Software Lirary:Target Independent Math Blocks V13.1手册的SMO模块估计反电动势
来自HVPM Sensorless->smopos.h程序中也印证了这一理论,
但是我参考了一些文献,估计反电动势都是
请问是哪里出了问题,目前我程序还没有在电机上运行,尚不清楚正确性,有人可以解释为什么反电动势动态方程不一样吗?
VJ:
回复 Green Deng:
您好,这里我大概理解了。请问您能回到一下我最新的帖子速度预估的那个问题吗,谢谢您。
你好,我最近在研究永磁同步电机的无速度传感器控制方法,从Digital Motor Control Software Lirary:Target Independent Math Blocks V13.1手册的SMO模块估计反电动势
来自HVPM Sensorless->smopos.h程序中也印证了这一理论,
但是我参考了一些文献,估计反电动势都是
请问是哪里出了问题,目前我程序还没有在电机上运行,尚不清楚正确性,有人可以解释为什么反电动势动态方程不一样吗?
Green Deng:
回复 VJ:
是这个吗?是的话我直接在那边回复了。
e2echina.ti.com/…/185905





