库中
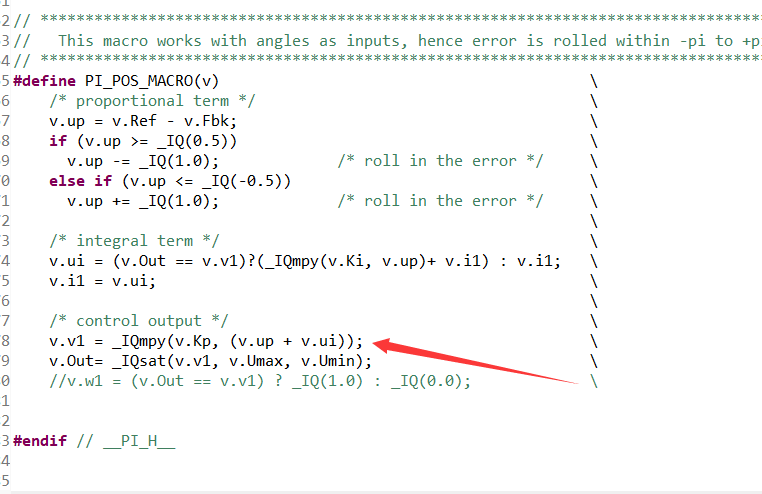
v.v1 = _IQmpy(v.Kp, (v.up + v.ui));
按照框图中 应该是
v.v1 = _IQmpy(v.Kp, v.up) + v.ui; 呀 ,?????????
Green Deng:你好,烦请贴出一下相关资料来源以便确认问题
库中
v.v1 = _IQmpy(v.Kp, (v.up + v.ui));
按照框图中 应该是
v.v1 = _IQmpy(v.Kp, v.up) + v.ui; 呀 ,?????????
user1303469:
回复 Green Deng:
DMC MATH_v13.1.pdf
F:\ti\controlSUITE\libs\app_libs\motor_control\math_blocks\v4.3\~Docs
库中
v.v1 = _IQmpy(v.Kp, (v.up + v.ui));
按照框图中 应该是
v.v1 = _IQmpy(v.Kp, v.up) + v.ui; 呀 ,?????????
user1303469:
回复 user1303469:
不好意思版本搞错了,4.1版本
库中
v.v1 = _IQmpy(v.Kp, (v.up + v.ui));
按照框图中 应该是
v.v1 = _IQmpy(v.Kp, v.up) + v.ui; 呀 ,?????????
user1303469:
回复 Green Deng:
这2种位置 控制,哪种更好点?
库中
v.v1 = _IQmpy(v.Kp, (v.up + v.ui));
按照框图中 应该是
v.v1 = _IQmpy(v.Kp, v.up) + v.ui; 呀 ,?????????
Green Deng:
回复 user1303469:
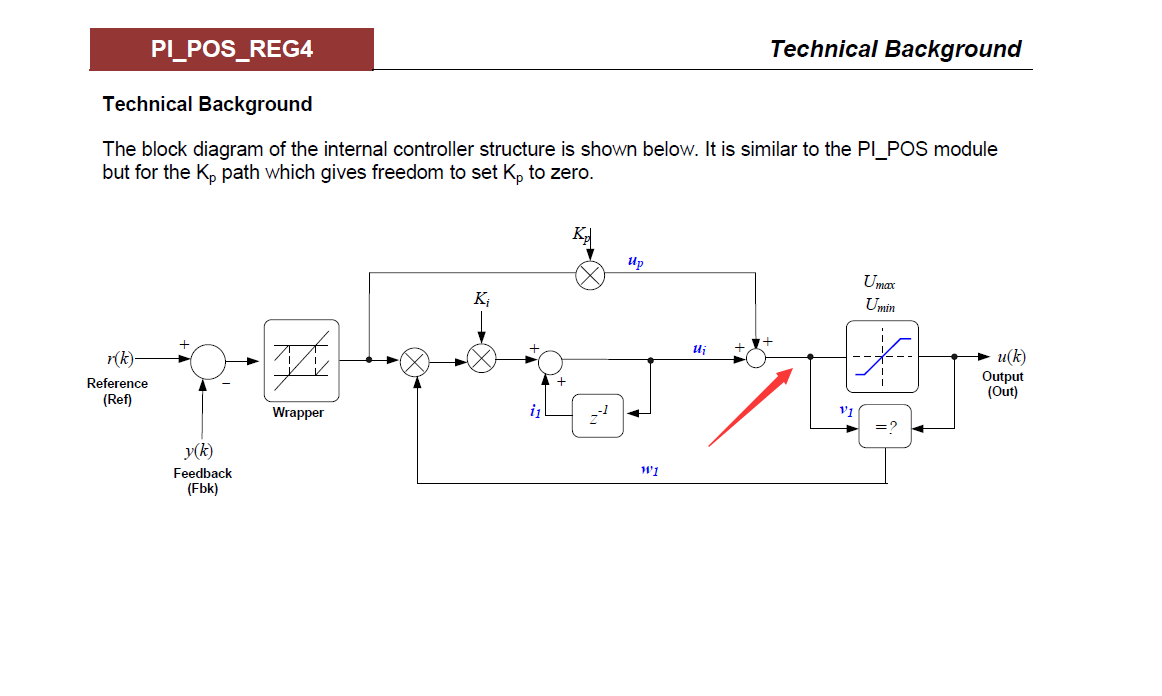
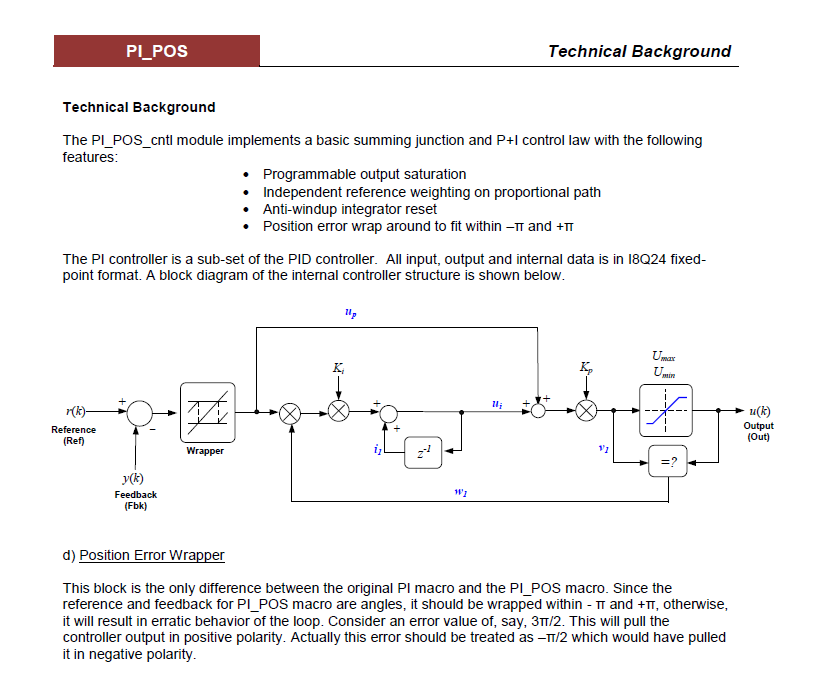
你是对的,代码和图表上的不符。该图显示了一个并行的PI,而源实现是串联的。
这个库已经很旧了,你可以参考C2000Ware中的DCL库,它包含了更新的控制器实现,包括串行和并行pi,以及允许Kp = 0的配置。
通常,串行配置更容易调优,因为P & I增益的调整不会相互影响。





