各位大神,我用的TI官方例程有两个问题:
1、永磁同步电机矢量控制的例程,为什么我用位置传感器测得的速度与给定的相差特别大,而且方向一会正一会负,用示波器测位置传感器的三路脉冲如图,这是什么问题呢?
2、如果改用滑动模态估算法得到的速度是正确的,然而如果构建速度外环控制的话,电机就会震动,然后停止转动,这又是什么问题呢?
非常感谢!!!
Eric Ma:
1. 你用什么位置传感器,图中曲线又分别是什么
2. 你用滑模算法,你是用电流环先去测试吗?有没有借鉴里面不同build level的编译,你用的是哪个build level.
Eric
各位大神,我用的TI官方例程有两个问题:
1、永磁同步电机矢量控制的例程,为什么我用位置传感器测得的速度与给定的相差特别大,而且方向一会正一会负,用示波器测位置传感器的三路脉冲如图,这是什么问题呢?
2、如果改用滑动模态估算法得到的速度是正确的,然而如果构建速度外环控制的话,电机就会震动,然后停止转动,这又是什么问题呢?
非常感谢!!!
xu zhang11:
回复 Eric Ma:
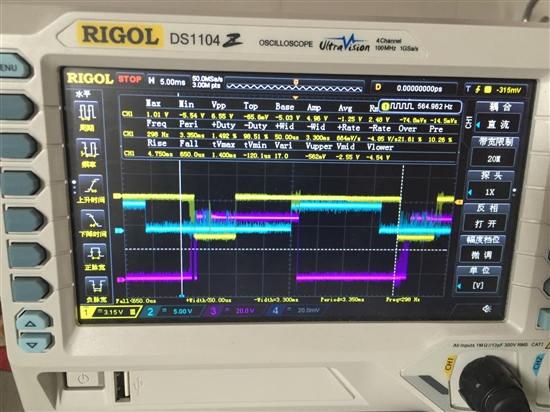
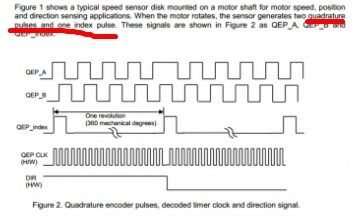
您好,我用的开发板是低压双轴控制套件:LVMultiAxis+PfcKit,在开发版上运行的是TI提供的程序,对该套件提供的电机BLY172S-24V-4000进行测速,利用的是该型号电机自带的位置传感器。我从build level1至6都已经试验过了。另外:该电机是否是霍尔传感器,从传感器提供的波形来看不应该是正交编码器,但该控制系统的程序及所提供的文档是按照正交编码器来的啊:
但是用示波器测得的是这样的:

上图黄色为索引脉冲,其它为A与B脉冲。
非常感谢!!!
各位大神,我用的TI官方例程有两个问题:
1、永磁同步电机矢量控制的例程,为什么我用位置传感器测得的速度与给定的相差特别大,而且方向一会正一会负,用示波器测位置传感器的三路脉冲如图,这是什么问题呢?
2、如果改用滑动模态估算法得到的速度是正确的,然而如果构建速度外环控制的话,电机就会震动,然后停止转动,这又是什么问题呢?
非常感谢!!!
Eric Ma:
回复 xu zhang11:
BLY172S-24V带的传感器就是霍尔传感器,你如果要使用霍尔控制方式,你就参考BLDC的历程。
如果你使用FOC的方式,那就是sensorless FOC.
两种是不同的控制算法。
ERIC
各位大神,我用的TI官方例程有两个问题:
1、永磁同步电机矢量控制的例程,为什么我用位置传感器测得的速度与给定的相差特别大,而且方向一会正一会负,用示波器测位置传感器的三路脉冲如图,这是什么问题呢?
2、如果改用滑动模态估算法得到的速度是正确的,然而如果构建速度外环控制的话,电机就会震动,然后停止转动,这又是什么问题呢?
非常感谢!!!
xu zhang11:
回复 Eric Ma:
谢谢您的回复,霍尔传感器的三路脉冲不应该是相差120度的吗?本电机如果采用FOC控制策略,可以使用sensored控制方式吗?
谢谢您。
各位大神,我用的TI官方例程有两个问题:
1、永磁同步电机矢量控制的例程,为什么我用位置传感器测得的速度与给定的相差特别大,而且方向一会正一会负,用示波器测位置传感器的三路脉冲如图,这是什么问题呢?
2、如果改用滑动模态估算法得到的速度是正确的,然而如果构建速度外环控制的话,电机就会震动,然后停止转动,这又是什么问题呢?
非常感谢!!!
Eric Ma:
回复 xu zhang11:
1. 是相差120度,你转动电机,自己去测一下hall那三根线。C:\ti\controlSUITE\development_kits\DRV8312-C2-KIT_v128\BLDC_Sensored\~Docs
2. 不可以。你都没有增量式编码器,怎么获得具体的角度信号。
无传感参考:C:\ti\controlSUITE\development_kits\DRV8312-C2-KIT_v128\PM_Sensorless\~Docs
Eric
各位大神,我用的TI官方例程有两个问题:
1、永磁同步电机矢量控制的例程,为什么我用位置传感器测得的速度与给定的相差特别大,而且方向一会正一会负,用示波器测位置传感器的三路脉冲如图,这是什么问题呢?
2、如果改用滑动模态估算法得到的速度是正确的,然而如果构建速度外环控制的话,电机就会震动,然后停止转动,这又是什么问题呢?
非常感谢!!!
xu zhang11:
回复 Eric Ma:
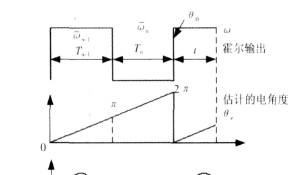
您好,我看了刚才你发的第二个技术文档,我可以根据霍尔传感器估算出电角度吗?
谢谢你。