鼠笼机矢量控制算法中的Clark变换,应该是用等功率变换还是用等幅值变换呢?
它们的区别是?对算法的影响是?
TI bpra048文档中的变换是等幅值变化吧,如下图所示:
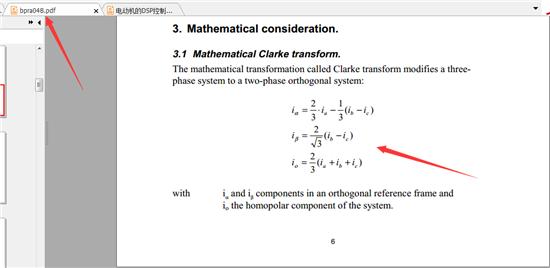
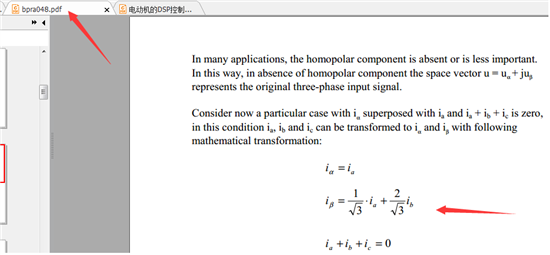
我的算法是按照这个公式做的;
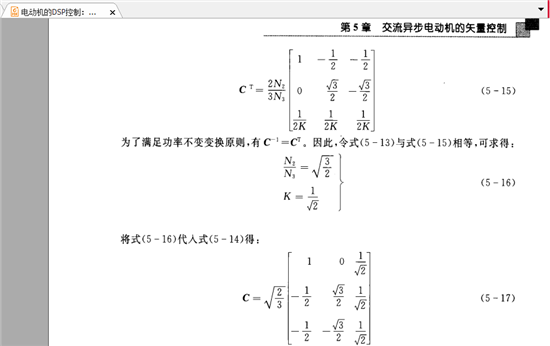
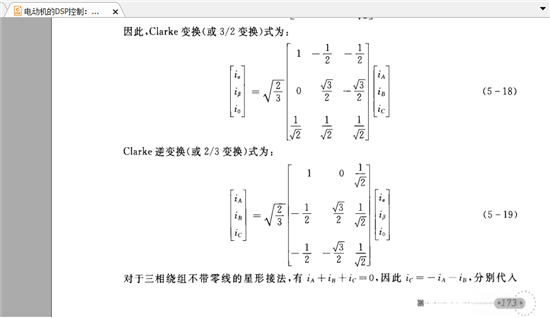
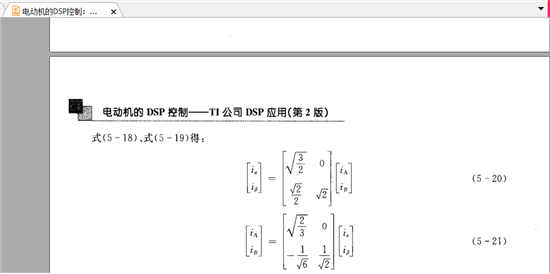
看了下北航出的《电动机的DSP控制》这本书,里面的clark推导是按照等功率做的:
user78960159:
回复 Terry Deng:
好的 感谢回复 我后来也查了一些资料
http://bbs.simol.cn/thread-57051-1-1.html
鼠笼机矢量控制算法中的Clark变换,应该是用等功率变换还是用等幅值变换呢?
它们的区别是?对算法的影响是?
TI bpra048文档中的变换是等幅值变化吧,如下图所示:
我的算法是按照这个公式做的;
看了下北航出的《电动机的DSP控制》这本书,里面的clark推导是按照等功率做的:
user78960159:
回复 Terry Deng:
好的 感谢回复 我后来也查了一些资料
http://bbs.simol.cn/thread-57051-1-1.html