各位ti牛人,
《InstaSPIN-FOC™ and InstaSPIN-MOTION™ User's Guide》里的7.1节提到:
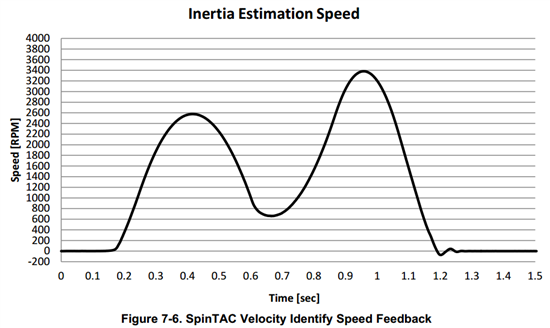
During inertia identification, the motor spins in a positive direction and will then spin briefly in a negative direction.
且inertia identification的速度曲线为
那么现在我打算用于直线永磁同步电机的控制时,interia的 identification要怎么进行,会不会电机行程不够用来interia identification?
或者有没有其他torque或speed 轨迹用来惯量辨识。
Johnson Chen1:
对于有传感器的电机来说,惯性识别可以在比较小的角度范围内识别,如果是无感的话,如果不能保证一定的加速度和速度,识别效果会不太好。
各位ti牛人,
《InstaSPIN-FOC™ and InstaSPIN-MOTION™ User's Guide》里的7.1节提到:
During inertia identification, the motor spins in a positive direction and will then spin briefly in a negative direction.
且inertia identification的速度曲线为
那么现在我打算用于直线永磁同步电机的控制时,interia的 identification要怎么进行,会不会电机行程不够用来interia identification?
或者有没有其他torque或speed 轨迹用来惯量辨识。
ming chen3:
回复 Johnson Chen1:
惯性识别应该就是转动惯量识别,对于旋转电机
Te=J*dw/dt;力矩可以通过fast得到,所以关键问题就是加速度的求解。对于sensor电机加速度可以通过编码器获取。而对于sensorless只能通过观测器中的速度信息获取,低速必然误差较大,影响系统的惯性测量。同时可系统的阻尼也是有一定关系的
各位ti牛人,
《InstaSPIN-FOC™ and InstaSPIN-MOTION™ User's Guide》里的7.1节提到:
During inertia identification, the motor spins in a positive direction and will then spin briefly in a negative direction.
且inertia identification的速度曲线为
那么现在我打算用于直线永磁同步电机的控制时,interia的 identification要怎么进行,会不会电机行程不够用来interia identification?
或者有没有其他torque或speed 轨迹用来惯量辨识。
GUANJIE YU:
回复 Johnson Chen1:
Johnson Chen1
对于有传感器的电机来说,惯性识别可以在比较小的角度范围内识别,如果是无感的话,如果不能保证一定的加速度和速度,识别效果会不太好。






