InstaSPIN-foc的28027f的例程中user.h
#define USER_MAX_VS_MAG_PU (0.5) // Set to 0.5 if a current reconstruction technique is not used. Look at the module svgen_current in lab10a-x for more info.
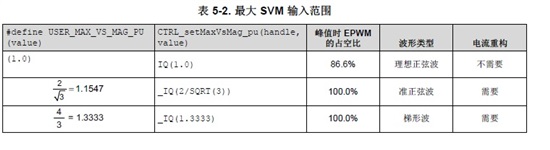
而InstaSPIN-foc用户手册中,#define USER_MAX_VS_MAG_PU (1.0)
这是什么原因?
ming chen3:
回复 Eric Ma:
这个值是否会导致电机的转速达不到期望值。下面是我实际中遇到的问题,请帮分析,谢谢~
http://www.deyisupport.com/question_answer/microcontrollers/c2000/f/56/t/114858.aspx
InstaSPIN-foc的28027f的例程中user.h
#define USER_MAX_VS_MAG_PU (0.5) // Set to 0.5 if a current reconstruction technique is not used. Look at the module svgen_current in lab10a-x for more info.
而InstaSPIN-foc用户手册中,#define USER_MAX_VS_MAG_PU (1.0)
这是什么原因?
ming chen3:
回复 Eric Ma:
Eric,你好~
我想问下对于无人机螺旋桨类高速电机控制是否适合采用FOC方案,和方波相比FOC是技术上先进,但是否真正适合无人机螺旋桨的高速电机控制应用。
个人觉得FOC更适合低速的伺服控制,实现精确的位置和速度控制。具有较小的力矩脉动。
1.而且对于高速运行下,是否要考虑最高转速受到PWM开关频率限制问题~
2.无人机螺旋桨控制采用FOC方案主要是基于哪方面的考虑?
谢谢!





