直流有刷电动机转速单闭环算法,由于没有电流内环,所以给定不能是阶跃信号,设定的转速是以步进方式加到控制器的。
测试过程中发现了一个不太理解的现象:
设置积分参数为0,
Kp=3.0 设定400rpm 实际转速220rpm
Kp=2.9 设定400rpm 实际转速210rpm
Kp=2.5 设定400rpm 实际转速240rpm
Kp=2.1 设定400rpm 实际转速270rpm
Kp=2.0 设定400rpm 实际转速145rpm
可以看到,
对于整数,随着Kp的增大,转速增大
对于小数,随着Kp的增大,转速降低
控制规律相反 是为什么呢?
Young Hu:
有没有框图,转速闭环的话,速度能够跟踪设定值啊
直流有刷电动机转速单闭环算法,由于没有电流内环,所以给定不能是阶跃信号,设定的转速是以步进方式加到控制器的。
测试过程中发现了一个不太理解的现象:
设置积分参数为0,
Kp=3.0 设定400rpm 实际转速220rpm
Kp=2.9 设定400rpm 实际转速210rpm
Kp=2.5 设定400rpm 实际转速240rpm
Kp=2.1 设定400rpm 实际转速270rpm
Kp=2.0 设定400rpm 实际转速145rpm
可以看到,
对于整数,随着Kp的增大,转速增大
对于小数,随着Kp的增大,转速降低
控制规律相反 是为什么呢?
user78960159:
回复 Young Hu:
恩 你注意看下我的实验条件 这个测试是在积分为0的条件下进行 会有静差
结构图到时我发上来 很简单 就是一个PI控制器 对转速构成闭环控制 控制器输出控制占空比
直流有刷电动机转速单闭环算法,由于没有电流内环,所以给定不能是阶跃信号,设定的转速是以步进方式加到控制器的。
测试过程中发现了一个不太理解的现象:
设置积分参数为0,
Kp=3.0 设定400rpm 实际转速220rpm
Kp=2.9 设定400rpm 实际转速210rpm
Kp=2.5 设定400rpm 实际转速240rpm
Kp=2.1 设定400rpm 实际转速270rpm
Kp=2.0 设定400rpm 实际转速145rpm
可以看到,
对于整数,随着Kp的增大,转速增大
对于小数,随着Kp的增大,转速降低
控制规律相反 是为什么呢?
Young Hu:
回复 user78960159:
Sorry, 没有看清楚。您可以看一下PI的输出是不是一样的规律。
直流有刷电动机转速单闭环算法,由于没有电流内环,所以给定不能是阶跃信号,设定的转速是以步进方式加到控制器的。
测试过程中发现了一个不太理解的现象:
设置积分参数为0,
Kp=3.0 设定400rpm 实际转速220rpm
Kp=2.9 设定400rpm 实际转速210rpm
Kp=2.5 设定400rpm 实际转速240rpm
Kp=2.1 设定400rpm 实际转速270rpm
Kp=2.0 设定400rpm 实际转速145rpm
可以看到,
对于整数,随着Kp的增大,转速增大
对于小数,随着Kp的增大,转速降低
控制规律相反 是为什么呢?
user78960159:
回复 Young Hu:
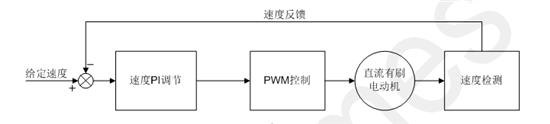
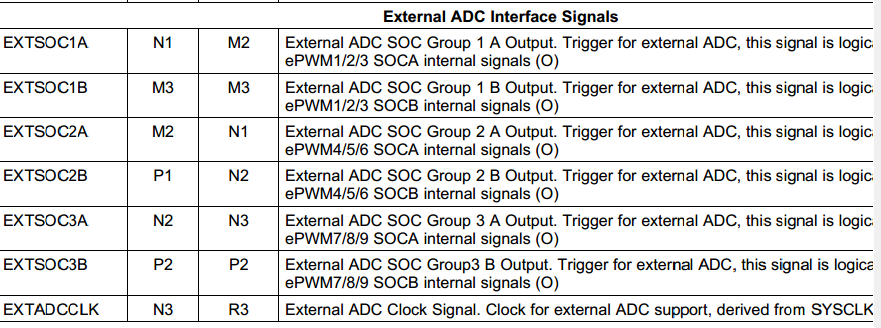
算法结构图如上
没有找到直流有刷电动机单闭环算法应该怎么做的权威一些的资料,所以是自己根据原理编写的代码。
因为没有电流环,所以我是步进给定设定量的,不知道是不是运算时有些问题。
PI控制器是增量式PI控制器,我的系统里还有其他电机算法,也都是调用的同样的PI控制器代码,感觉这个PI控制器的代码应该没有问题。
至于PI参数整数与小数,因为2812是定点控制器,所以设定下来也是用了Q格式,因此对于PI控制器运算,参数小数与整数应该是一样。
目前还是怀疑问题出在给定量的设定方式
直流有刷电动机转速单闭环算法,由于没有电流内环,所以给定不能是阶跃信号,设定的转速是以步进方式加到控制器的。
测试过程中发现了一个不太理解的现象:
设置积分参数为0,
Kp=3.0 设定400rpm 实际转速220rpm
Kp=2.9 设定400rpm 实际转速210rpm
Kp=2.5 设定400rpm 实际转速240rpm
Kp=2.1 设定400rpm 实际转速270rpm
Kp=2.0 设定400rpm 实际转速145rpm
可以看到,
对于整数,随着Kp的增大,转速增大
对于小数,随着Kp的增大,转速降低
控制规律相反 是为什么呢?
user78960159:
回复 Young Hu:
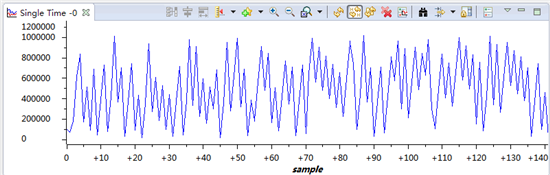
针对直流有刷电动机单闭环算法积分为0的情况,调整比例系数,我又仔细测试了两组数据
一下两张图
横轴代表比例系数
纵轴代表电动机转速
设定转速300rpm
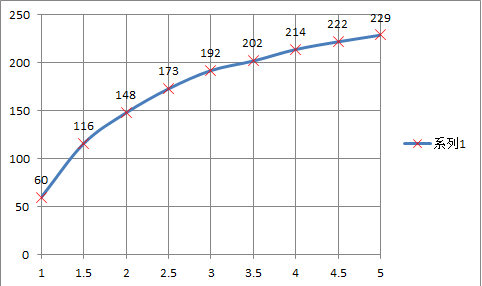
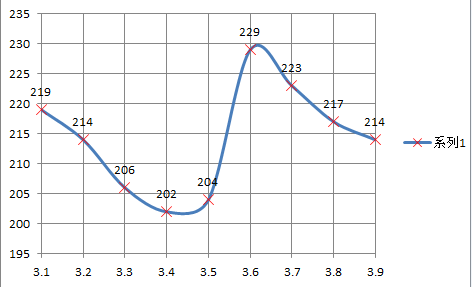
第一张图步进是0.5,可以看出,随着比例系数的增大,静差逐渐减小;
第二张图是取了3.1到3.9这个区间,以0.1为步进,可以看出,电机转速有拐点出现。
直流有刷电动机转速单闭环算法,由于没有电流内环,所以给定不能是阶跃信号,设定的转速是以步进方式加到控制器的。
测试过程中发现了一个不太理解的现象:
设置积分参数为0,
Kp=3.0 设定400rpm 实际转速220rpm
Kp=2.9 设定400rpm 实际转速210rpm
Kp=2.5 设定400rpm 实际转速240rpm
Kp=2.1 设定400rpm 实际转速270rpm
Kp=2.0 设定400rpm 实际转速145rpm
可以看到,
对于整数,随着Kp的增大,转速增大
对于小数,随着Kp的增大,转速降低
控制规律相反 是为什么呢?
user78960159:
问题已解决
参见
http://www.deyisupport.com/question_answer/microcontrollers/c2000/f/56/t/119535.aspx
直流有刷电动机转速单闭环算法,由于没有电流内环,所以给定不能是阶跃信号,设定的转速是以步进方式加到控制器的。
测试过程中发现了一个不太理解的现象:
设置积分参数为0,
Kp=3.0 设定400rpm 实际转速220rpm
Kp=2.9 设定400rpm 实际转速210rpm
Kp=2.5 设定400rpm 实际转速240rpm
Kp=2.1 设定400rpm 实际转速270rpm
Kp=2.0 设定400rpm 实际转速145rpm
可以看到,
对于整数,随着Kp的增大,转速增大
对于小数,随着Kp的增大,转速降低
控制规律相反 是为什么呢?
Igor An:
回复 user78960159:
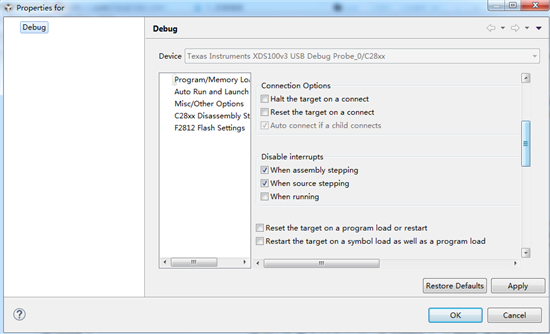
你好,请测试一下各种Kp参数下加到电机端口的电压值,或者观测一下各种Kp下MCU发出的PWM占空比大小。
我认为有可能是代码语法上有书写错误,导致有小数情况下计算的结果不正确,或者是测量方法上有问题。
理论上来讲一阶系统中,Kp增大,静差减小,这是不会错的,所以请查看一下各种Kp配置下,具体的计算结果是否和理论值有出入。