问题的提出:
直流有刷电动机单闭环算法在实际应用中很少采用,多见于教学。针对这种控制方式,也没有很正式的资料讲解如何通过编程实现。
此种控制方式和直流有刷电动机的开环控制一样,不具有电流环控制,因此从给定量的角度出发,不能突加阶跃信号。
早期的教学设备中往往通过滑动变阻器施加输入信号。而在通过微控制器编程实现算法控制时,步进给定量是通过timer,以一定的时间间隔设定的。时间间隔的大小,会影响PI控制器参数的控制规律。
直流有刷电动机转速单闭环控制框图如下:
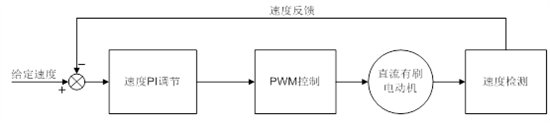
对于速度PI控制器,积分参数设定为0,考察比例系数变化对系统的影响。
测试时,给定转速为300rpm。
随着比例系数的增大,电机转速应向趋于设定转速的方向变化。但是如果步进给定量设定不合理,会造成控制规律的异常,给实验值者带来困惑。
当步进给定量设置为2时,考察比例系数3.1至3.9区间转速的变化规律,比例系数以0.1为间隔增加,测定的比例系数-转速(X-Y)曲线如下图所示:
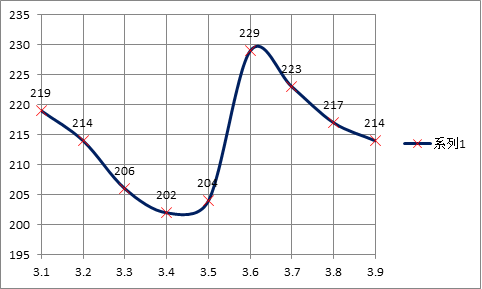
Figure1步进给定2
X轴为比例系数,Y轴位电动机转速。可以看出,转速出现明显拐点,不符合比例系数变化时对系统的应有影响。
随着步进给定量的增加,控制规律才逐渐恢复正常:
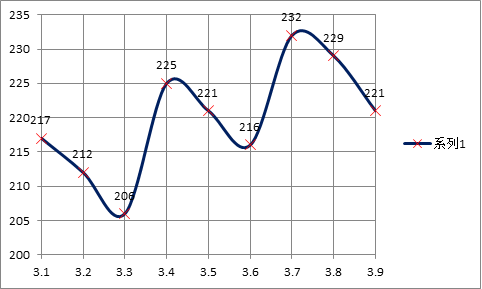
Figure2步进给定3
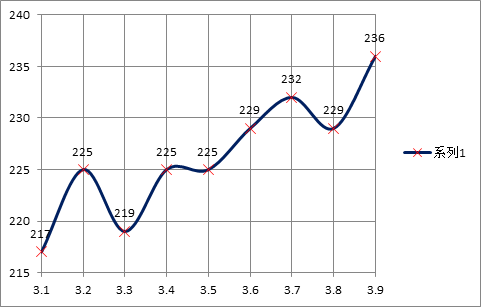
Figure3步进给定6

Figure4步进给定9
从Figure4可以看出,转速随笔系系数的增加逐步接近设定转速300rpm,不再出现Figure1所示的拐点。
步进给定9,测试4到5区间、5到6区间,控制规律一致:

Figure5 4到5区间段控制规律

Figure6 5到6区间段控制规律
比例系数3至6区间段的控制规律如下图所示:

Figure7比例系数3至6区间段规律
结论:本文探讨了直流有刷电动机转速单闭环控制时,步进给定方式对PI控制器比例系数控制规律的影响,具体步进给定量的大小需根据系统调试决定,以出现正常的控制规律(如Figure7)时的步进量为最佳。
10#:
这应该不是具体的一个问题,而是技术讨论和分享?如果是,麻烦下次发表时点选“讨论”后发表。感谢你的分享!