控制算法自行编写
测试三相鼠笼异步电动机负载运行特性
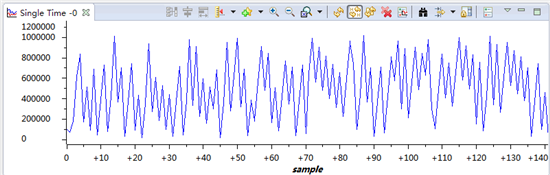
满压条件下,运行开环SVPWM算法,转速设定1200rpm,负载加至70%,相电流0.53A,转速跌落至1073rpm;
对比矢量控制
满压条件下,运行FOC算法,转速设定1200rpm,负载加至70%,开始时pi控制器限幅值小,转速跌落明显,后加大限幅值,相电流1.00A,转速跌落至1073rpm。
分析:
开环算法测试时,电机转速跌落至1073,是否说明该电机在70%负载条件下只能运行到如此状态呢?因为是开关算法,所以没有转矩电流控制,如果带不动负载,那确实是负载能力有限,已经到达极限了呢。
若如此,FOC即便是控制相电流是开环算法的两倍,也依然无法达到设定转速1200rpm,这个现象似乎是正常的。多余的能量消耗在电机的磁滞和涡流损耗,导致电机 发热,噪音变大,启动时有滞后。
如果以上分析是对的,那么对于当前FOC算法,是不是应该调整pi控制器限幅值,将相电流控制在开环算法时的0.53A呢
以上问题和分析请大家指正。
ming chen3:
你说的开环SVPWM是变频器的方式?SVPWM控制方式就是FOC。你说的开环SVPWM是恒压频比的方式?
我在同步电机上实验,变频器拖动,最高转速只能达到1000多rpm,而且电机发热大,需要做水冷处理。
而采用sensorlesss-FOC方案,电机最高转速可以达到3000多rpm,几乎没什么发热。
效率显而易见。
控制算法自行编写
测试三相鼠笼异步电动机负载运行特性
满压条件下,运行开环SVPWM算法,转速设定1200rpm,负载加至70%,相电流0.53A,转速跌落至1073rpm;
对比矢量控制
满压条件下,运行FOC算法,转速设定1200rpm,负载加至70%,开始时pi控制器限幅值小,转速跌落明显,后加大限幅值,相电流1.00A,转速跌落至1073rpm。
分析:
开环算法测试时,电机转速跌落至1073,是否说明该电机在70%负载条件下只能运行到如此状态呢?因为是开关算法,所以没有转矩电流控制,如果带不动负载,那确实是负载能力有限,已经到达极限了呢。
若如此,FOC即便是控制相电流是开环算法的两倍,也依然无法达到设定转速1200rpm,这个现象似乎是正常的。多余的能量消耗在电机的磁滞和涡流损耗,导致电机 发热,噪音变大,启动时有滞后。
如果以上分析是对的,那么对于当前FOC算法,是不是应该调整pi控制器限幅值,将相电流控制在开环算法时的0.53A呢
以上问题和分析请大家指正。
user78960159:
回复 ming chen3:
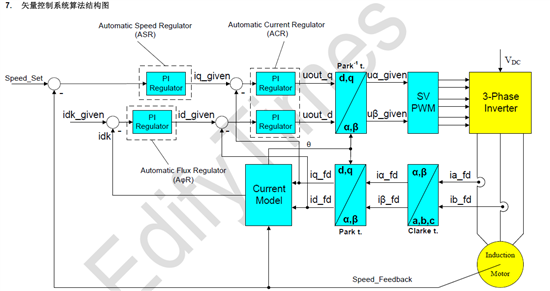
1.“SVPWM控制方式就是FOC。”
SV是SV啊,为什么说SV就是FOC?不解
SV是控制前端逆变器的方式之一,是FOC的一部分,用SP也行,不过效率低
这是我的算法图:
2.我这个帖子的问题倒不是要解决电机发热问题,是对负载运行下鼠笼机的特性有些疑问
3.你说的是同步机,我这个帖子里提到的问题是对鼠笼机的,鼠笼机2极的
4.你是用变频器拖动,我是算法代码和硬件电路都是自己弄的
感谢你的回复,但是觉得你的回复和我这个帖子里的问题好像没太大关系