/* ==================================================================================
File name:PID_REG3.H (IQ version)
=====================================================================================*/
#ifndef __PIDREG3_H__
#define __PIDREG3_H__
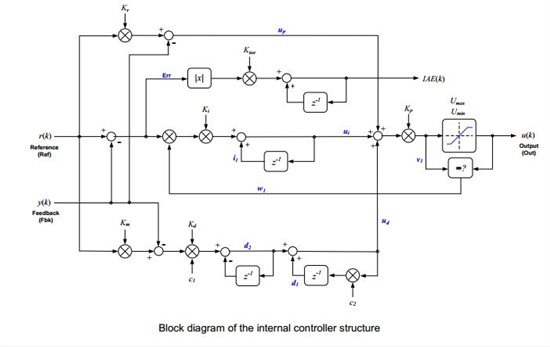
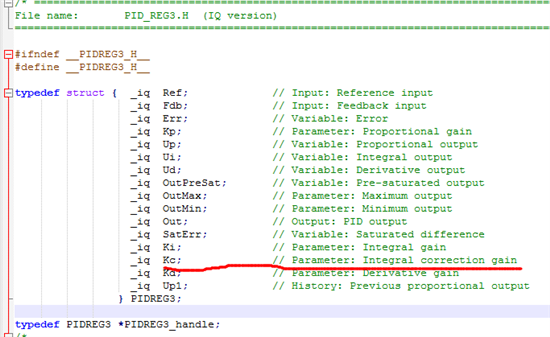
typedef struct { _iq Ref; // Input: Reference input_iq Fdb; // Input: Feedback input_iq Err; // Variable: Error_iq Kp; // Parameter: Proportional gain_iq Up; // Variable: Proportional output_iq Ui; // Variable: Integral output_iq Ud; // Variable: Derivative output_iq OutPreSat; // Variable: Pre-saturated output_iq OutMax;// Parameter: Maximum output_iq OutMin; // Parameter: Minimum output_iq Out; // Output: PID output_iq SatErr; // Variable: Saturated difference_iq Ki;// Parameter: Integral gain_iq Kc; // Parameter: Integral correction gain_iq Kd;// Parameter: Derivative gain_iq Up1;// History: Previous proportional output } PIDREG3;
typedef PIDREG3 *PIDREG3_handle;
/*-----------------------------------------------------------------------------
Default initalizer for the PIDREG3 object.
-----------------------------------------------------------------------------*/
#define PIDREG3_DEFAULTS { 0, \0, \0, \_IQ(1.3), \0, \0, \0, \0, \_IQ(1), \_IQ(-1), \0, \0, \_IQ(0.02), \_IQ(0.5), \_IQ(1.05), \0, \}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_REG3_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.OutPreSat= v.Up + v.Ui; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up; /* Update the previous proportional output */
#define PID_REG3_POS_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
if (v.Err >= _IQ(0.5)) \
v.Err -= _IQ(1.0); /* roll in the error */ \
else if (v.Err <= _IQ(-0.5)) \
v.Err += _IQ(1.0); /* roll in the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.Ud = _IQmpy(v.Kd,(v.Up - v.Up1)); \
v.OutPreSat= v.Up + v.Ui + v.Ud; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up;
#endif // __PIDREG3_H__
// Add the lines below if derivative output is needed following the integral update
位置在ti\controlSUITE\libs\app_libs\motor_control\math_blocks\v4.3/
在给出的文档中似乎没有对这个的说明(看大家用的这个,也打算用这个。把Kd设为0就是PI了吧)
1、Kc,积分校正增益,没明白是什么作用
2、这个是增量式PID吗?
3、SatErr,饱和差,好像是v->SatErr = v->Out – v->OutPreSat;,但不知道什么用
4、v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr);也即是// Compute the integral output
v->Ui = v->Ui +v->Ki*v->Up + v->Kc*v->SatErr;其中的v->Kc*v->SatErr;怎么理解啊,为什么加上v->Ki*v->Up + v->Kc*v->SatErr,加上当前误差乘以Ki不就可以了吗?
5、// Compute the derivative output
v->Ud = v->Kd*(v->Up – v->Up1);计算微分的时候为什么用的是比例输出。
6、_iq换成了float32, _IQ(1.3)换成1.3也可以吧。想换成浮点型的。
谢谢
feng shi:
这个大家谁知道吗,不需要回答全部,回答下您知道的就可以,非常感谢。
/* ==================================================================================
File name:PID_REG3.H (IQ version)
=====================================================================================*/
#ifndef __PIDREG3_H__
#define __PIDREG3_H__
typedef struct { _iq Ref; // Input: Reference input_iq Fdb; // Input: Feedback input_iq Err; // Variable: Error_iq Kp; // Parameter: Proportional gain_iq Up; // Variable: Proportional output_iq Ui; // Variable: Integral output_iq Ud; // Variable: Derivative output_iq OutPreSat; // Variable: Pre-saturated output_iq OutMax;// Parameter: Maximum output_iq OutMin; // Parameter: Minimum output_iq Out; // Output: PID output_iq SatErr; // Variable: Saturated difference_iq Ki;// Parameter: Integral gain_iq Kc; // Parameter: Integral correction gain_iq Kd;// Parameter: Derivative gain_iq Up1;// History: Previous proportional output } PIDREG3;
typedef PIDREG3 *PIDREG3_handle;
/*-----------------------------------------------------------------------------
Default initalizer for the PIDREG3 object.
-----------------------------------------------------------------------------*/
#define PIDREG3_DEFAULTS { 0, \0, \0, \_IQ(1.3), \0, \0, \0, \0, \_IQ(1), \_IQ(-1), \0, \0, \_IQ(0.02), \_IQ(0.5), \_IQ(1.05), \0, \}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_REG3_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.OutPreSat= v.Up + v.Ui; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up; /* Update the previous proportional output */
#define PID_REG3_POS_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
if (v.Err >= _IQ(0.5)) \
v.Err -= _IQ(1.0); /* roll in the error */ \
else if (v.Err <= _IQ(-0.5)) \
v.Err += _IQ(1.0); /* roll in the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.Ud = _IQmpy(v.Kd,(v.Up - v.Up1)); \
v.OutPreSat= v.Up + v.Ui + v.Ud; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up;
#endif // __PIDREG3_H__
// Add the lines below if derivative output is needed following the integral update
位置在ti\controlSUITE\libs\app_libs\motor_control\math_blocks\v4.3/
在给出的文档中似乎没有对这个的说明(看大家用的这个,也打算用这个。把Kd设为0就是PI了吧)
1、Kc,积分校正增益,没明白是什么作用
2、这个是增量式PID吗?
3、SatErr,饱和差,好像是v->SatErr = v->Out – v->OutPreSat;,但不知道什么用
4、v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr);也即是// Compute the integral output
v->Ui = v->Ui +v->Ki*v->Up + v->Kc*v->SatErr;其中的v->Kc*v->SatErr;怎么理解啊,为什么加上v->Ki*v->Up + v->Kc*v->SatErr,加上当前误差乘以Ki不就可以了吗?
5、// Compute the derivative output
v->Ud = v->Kd*(v->Up – v->Up1);计算微分的时候为什么用的是比例输出。
6、_iq换成了float32, _IQ(1.3)换成1.3也可以吧。想换成浮点型的。
谢谢
??????:
你好!
我是一个DSP的菜鸟不知理解的对不对,2你的这个算法好像不是增量式的PID,好像是位置式的PID,
Up= _IQmpy(v.Kp,v.Err),比例环节,
Ui= v.Ui + _IQmpy(v.Ki,v.Up)积分环节,
Ud = _IQmpy(v.Kd,(v.Up - v.Up1))微分环节,饱和差我也不是很清楚,但是位置式的PID由于积分一直在累加求和因此需要退饱和,具体怎么退饱和我没有接触过所以我说不清楚。
Ud = v->Kd*(v->Up - v->Up1)这是微分环节离散化之后的公式,以上的三个PID都是经过离散化的,
Kd(du/dt),离散化就是前后两个时间的差值,也就是
Kd*(v->Up - v->Up1)。
而增量式PID比位置式的多一步,增量式是前后两个时间位置PID的差值。
不知我理解的对不对,仅供你参考!谢谢!
/* ==================================================================================
File name:PID_REG3.H (IQ version)
=====================================================================================*/
#ifndef __PIDREG3_H__
#define __PIDREG3_H__
typedef struct { _iq Ref; // Input: Reference input_iq Fdb; // Input: Feedback input_iq Err; // Variable: Error_iq Kp; // Parameter: Proportional gain_iq Up; // Variable: Proportional output_iq Ui; // Variable: Integral output_iq Ud; // Variable: Derivative output_iq OutPreSat; // Variable: Pre-saturated output_iq OutMax;// Parameter: Maximum output_iq OutMin; // Parameter: Minimum output_iq Out; // Output: PID output_iq SatErr; // Variable: Saturated difference_iq Ki;// Parameter: Integral gain_iq Kc; // Parameter: Integral correction gain_iq Kd;// Parameter: Derivative gain_iq Up1;// History: Previous proportional output } PIDREG3;
typedef PIDREG3 *PIDREG3_handle;
/*-----------------------------------------------------------------------------
Default initalizer for the PIDREG3 object.
-----------------------------------------------------------------------------*/
#define PIDREG3_DEFAULTS { 0, \0, \0, \_IQ(1.3), \0, \0, \0, \0, \_IQ(1), \_IQ(-1), \0, \0, \_IQ(0.02), \_IQ(0.5), \_IQ(1.05), \0, \}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_REG3_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.OutPreSat= v.Up + v.Ui; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up; /* Update the previous proportional output */
#define PID_REG3_POS_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
if (v.Err >= _IQ(0.5)) \
v.Err -= _IQ(1.0); /* roll in the error */ \
else if (v.Err <= _IQ(-0.5)) \
v.Err += _IQ(1.0); /* roll in the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.Ud = _IQmpy(v.Kd,(v.Up - v.Up1)); \
v.OutPreSat= v.Up + v.Ui + v.Ud; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up;
#endif // __PIDREG3_H__
// Add the lines below if derivative output is needed following the integral update
位置在ti\controlSUITE\libs\app_libs\motor_control\math_blocks\v4.3/
在给出的文档中似乎没有对这个的说明(看大家用的这个,也打算用这个。把Kd设为0就是PI了吧)
1、Kc,积分校正增益,没明白是什么作用
2、这个是增量式PID吗?
3、SatErr,饱和差,好像是v->SatErr = v->Out – v->OutPreSat;,但不知道什么用
4、v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr);也即是// Compute the integral output
v->Ui = v->Ui +v->Ki*v->Up + v->Kc*v->SatErr;其中的v->Kc*v->SatErr;怎么理解啊,为什么加上v->Ki*v->Up + v->Kc*v->SatErr,加上当前误差乘以Ki不就可以了吗?
5、// Compute the derivative output
v->Ud = v->Kd*(v->Up – v->Up1);计算微分的时候为什么用的是比例输出。
6、_iq换成了float32, _IQ(1.3)换成1.3也可以吧。想换成浮点型的。
谢谢
feng shi:
回复 ??????:
谢谢您的回答,不过_iq换成了float32, _IQ(1.3)换成1.3也可以吧。想换成浮点型的。
Ui= v.Ui + _IQmpy(v.Ki,v.Up)积分环节,这个是得出积分的输出,但是不应该是
v.Ui +KI*Err吗,为什么是_IQmpy(v.Ki,v.Up),谢谢
/* ==================================================================================
File name:PID_REG3.H (IQ version)
=====================================================================================*/
#ifndef __PIDREG3_H__
#define __PIDREG3_H__
typedef struct { _iq Ref; // Input: Reference input_iq Fdb; // Input: Feedback input_iq Err; // Variable: Error_iq Kp; // Parameter: Proportional gain_iq Up; // Variable: Proportional output_iq Ui; // Variable: Integral output_iq Ud; // Variable: Derivative output_iq OutPreSat; // Variable: Pre-saturated output_iq OutMax;// Parameter: Maximum output_iq OutMin; // Parameter: Minimum output_iq Out; // Output: PID output_iq SatErr; // Variable: Saturated difference_iq Ki;// Parameter: Integral gain_iq Kc; // Parameter: Integral correction gain_iq Kd;// Parameter: Derivative gain_iq Up1;// History: Previous proportional output } PIDREG3;
typedef PIDREG3 *PIDREG3_handle;
/*-----------------------------------------------------------------------------
Default initalizer for the PIDREG3 object.
-----------------------------------------------------------------------------*/
#define PIDREG3_DEFAULTS { 0, \0, \0, \_IQ(1.3), \0, \0, \0, \0, \_IQ(1), \_IQ(-1), \0, \0, \_IQ(0.02), \_IQ(0.5), \_IQ(1.05), \0, \}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_REG3_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.OutPreSat= v.Up + v.Ui; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up; /* Update the previous proportional output */
#define PID_REG3_POS_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
if (v.Err >= _IQ(0.5)) \
v.Err -= _IQ(1.0); /* roll in the error */ \
else if (v.Err <= _IQ(-0.5)) \
v.Err += _IQ(1.0); /* roll in the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.Ud = _IQmpy(v.Kd,(v.Up - v.Up1)); \
v.OutPreSat= v.Up + v.Ui + v.Ud; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up;
#endif // __PIDREG3_H__
// Add the lines below if derivative output is needed following the integral update
位置在ti\controlSUITE\libs\app_libs\motor_control\math_blocks\v4.3/
在给出的文档中似乎没有对这个的说明(看大家用的这个,也打算用这个。把Kd设为0就是PI了吧)
1、Kc,积分校正增益,没明白是什么作用
2、这个是增量式PID吗?
3、SatErr,饱和差,好像是v->SatErr = v->Out – v->OutPreSat;,但不知道什么用
4、v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr);也即是// Compute the integral output
v->Ui = v->Ui +v->Ki*v->Up + v->Kc*v->SatErr;其中的v->Kc*v->SatErr;怎么理解啊,为什么加上v->Ki*v->Up + v->Kc*v->SatErr,加上当前误差乘以Ki不就可以了吗?
5、// Compute the derivative output
v->Ud = v->Kd*(v->Up – v->Up1);计算微分的时候为什么用的是比例输出。
6、_iq换成了float32, _IQ(1.3)换成1.3也可以吧。想换成浮点型的。
谢谢
??????:
回复 feng shi:
您好!
关于这个问题,我也有疑问,我比较同意你的看法v.Ui +KI*Err,不知是不是这个PID中间还有其他的传递环节,因为我上面写的那个参考是最简单的数学模型,你的这个应该比较复杂点,所以我也没什么把握!我再查查资料,如果你弄明白了也请给我留言谢谢!
/* ==================================================================================
File name:PID_REG3.H (IQ version)
=====================================================================================*/
#ifndef __PIDREG3_H__
#define __PIDREG3_H__
typedef struct { _iq Ref; // Input: Reference input_iq Fdb; // Input: Feedback input_iq Err; // Variable: Error_iq Kp; // Parameter: Proportional gain_iq Up; // Variable: Proportional output_iq Ui; // Variable: Integral output_iq Ud; // Variable: Derivative output_iq OutPreSat; // Variable: Pre-saturated output_iq OutMax;// Parameter: Maximum output_iq OutMin; // Parameter: Minimum output_iq Out; // Output: PID output_iq SatErr; // Variable: Saturated difference_iq Ki;// Parameter: Integral gain_iq Kc; // Parameter: Integral correction gain_iq Kd;// Parameter: Derivative gain_iq Up1;// History: Previous proportional output } PIDREG3;
typedef PIDREG3 *PIDREG3_handle;
/*-----------------------------------------------------------------------------
Default initalizer for the PIDREG3 object.
-----------------------------------------------------------------------------*/
#define PIDREG3_DEFAULTS { 0, \0, \0, \_IQ(1.3), \0, \0, \0, \0, \_IQ(1), \_IQ(-1), \0, \0, \_IQ(0.02), \_IQ(0.5), \_IQ(1.05), \0, \}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_REG3_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.OutPreSat= v.Up + v.Ui; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up; /* Update the previous proportional output */
#define PID_REG3_POS_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
if (v.Err >= _IQ(0.5)) \
v.Err -= _IQ(1.0); /* roll in the error */ \
else if (v.Err <= _IQ(-0.5)) \
v.Err += _IQ(1.0); /* roll in the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.Ud = _IQmpy(v.Kd,(v.Up - v.Up1)); \
v.OutPreSat= v.Up + v.Ui + v.Ud; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up;
#endif // __PIDREG3_H__
// Add the lines below if derivative output is needed following the integral update
位置在ti\controlSUITE\libs\app_libs\motor_control\math_blocks\v4.3/
在给出的文档中似乎没有对这个的说明(看大家用的这个,也打算用这个。把Kd设为0就是PI了吧)
1、Kc,积分校正增益,没明白是什么作用
2、这个是增量式PID吗?
3、SatErr,饱和差,好像是v->SatErr = v->Out – v->OutPreSat;,但不知道什么用
4、v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr);也即是// Compute the integral output
v->Ui = v->Ui +v->Ki*v->Up + v->Kc*v->SatErr;其中的v->Kc*v->SatErr;怎么理解啊,为什么加上v->Ki*v->Up + v->Kc*v->SatErr,加上当前误差乘以Ki不就可以了吗?
5、// Compute the derivative output
v->Ud = v->Kd*(v->Up – v->Up1);计算微分的时候为什么用的是比例输出。
6、_iq换成了float32, _IQ(1.3)换成1.3也可以吧。想换成浮点型的。
谢谢
user78960159:
KC
积分修正系数
以直流有刷电动机转速电流双闭环控制算法为例,控制环路有两个:转速环和电流环。
转速环的PI控制器可以饱和,然而电流是瞬态量,因此内环的PI控制器是不允许饱和的,因此电流环的PI控制器有3个参数,比例、积分和抗积分饱和修正系数(Kc)
因为控制器饱和以后是失效的状态,从饱和到推饱和是需要时间的,这个延时对电流环控制来讲是不允许的,所以电流环要用抗积分饱和PI控制器
/* ==================================================================================
File name:PID_REG3.H (IQ version)
=====================================================================================*/
#ifndef __PIDREG3_H__
#define __PIDREG3_H__
typedef struct { _iq Ref; // Input: Reference input_iq Fdb; // Input: Feedback input_iq Err; // Variable: Error_iq Kp; // Parameter: Proportional gain_iq Up; // Variable: Proportional output_iq Ui; // Variable: Integral output_iq Ud; // Variable: Derivative output_iq OutPreSat; // Variable: Pre-saturated output_iq OutMax;// Parameter: Maximum output_iq OutMin; // Parameter: Minimum output_iq Out; // Output: PID output_iq SatErr; // Variable: Saturated difference_iq Ki;// Parameter: Integral gain_iq Kc; // Parameter: Integral correction gain_iq Kd;// Parameter: Derivative gain_iq Up1;// History: Previous proportional output } PIDREG3;
typedef PIDREG3 *PIDREG3_handle;
/*-----------------------------------------------------------------------------
Default initalizer for the PIDREG3 object.
-----------------------------------------------------------------------------*/
#define PIDREG3_DEFAULTS { 0, \0, \0, \_IQ(1.3), \0, \0, \0, \0, \_IQ(1), \_IQ(-1), \0, \0, \_IQ(0.02), \_IQ(0.5), \_IQ(1.05), \0, \}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_REG3_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.OutPreSat= v.Up + v.Ui; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up; /* Update the previous proportional output */
#define PID_REG3_POS_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
if (v.Err >= _IQ(0.5)) \
v.Err -= _IQ(1.0); /* roll in the error */ \
else if (v.Err <= _IQ(-0.5)) \
v.Err += _IQ(1.0); /* roll in the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.Ud = _IQmpy(v.Kd,(v.Up - v.Up1)); \
v.OutPreSat= v.Up + v.Ui + v.Ud; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up;
#endif // __PIDREG3_H__
// Add the lines below if derivative output is needed following the integral update
位置在ti\controlSUITE\libs\app_libs\motor_control\math_blocks\v4.3/
在给出的文档中似乎没有对这个的说明(看大家用的这个,也打算用这个。把Kd设为0就是PI了吧)
1、Kc,积分校正增益,没明白是什么作用
2、这个是增量式PID吗?
3、SatErr,饱和差,好像是v->SatErr = v->Out – v->OutPreSat;,但不知道什么用
4、v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr);也即是// Compute the integral output
v->Ui = v->Ui +v->Ki*v->Up + v->Kc*v->SatErr;其中的v->Kc*v->SatErr;怎么理解啊,为什么加上v->Ki*v->Up + v->Kc*v->SatErr,加上当前误差乘以Ki不就可以了吗?
5、// Compute the derivative output
v->Ud = v->Kd*(v->Up – v->Up1);计算微分的时候为什么用的是比例输出。
6、_iq换成了float32, _IQ(1.3)换成1.3也可以吧。想换成浮点型的。
谢谢
user78960159:
关于PI和PID
之前查到个说法 说电机控制系统是单极点系统,不存在多极点系统引起的滞后问题
所以一般用PI,没必要用PID
/* ==================================================================================
File name:PID_REG3.H (IQ version)
=====================================================================================*/
#ifndef __PIDREG3_H__
#define __PIDREG3_H__
typedef struct { _iq Ref; // Input: Reference input_iq Fdb; // Input: Feedback input_iq Err; // Variable: Error_iq Kp; // Parameter: Proportional gain_iq Up; // Variable: Proportional output_iq Ui; // Variable: Integral output_iq Ud; // Variable: Derivative output_iq OutPreSat; // Variable: Pre-saturated output_iq OutMax;// Parameter: Maximum output_iq OutMin; // Parameter: Minimum output_iq Out; // Output: PID output_iq SatErr; // Variable: Saturated difference_iq Ki;// Parameter: Integral gain_iq Kc; // Parameter: Integral correction gain_iq Kd;// Parameter: Derivative gain_iq Up1;// History: Previous proportional output } PIDREG3;
typedef PIDREG3 *PIDREG3_handle;
/*-----------------------------------------------------------------------------
Default initalizer for the PIDREG3 object.
-----------------------------------------------------------------------------*/
#define PIDREG3_DEFAULTS { 0, \0, \0, \_IQ(1.3), \0, \0, \0, \0, \_IQ(1), \_IQ(-1), \0, \0, \_IQ(0.02), \_IQ(0.5), \_IQ(1.05), \0, \}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_REG3_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.OutPreSat= v.Up + v.Ui; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up; /* Update the previous proportional output */
#define PID_REG3_POS_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
if (v.Err >= _IQ(0.5)) \
v.Err -= _IQ(1.0); /* roll in the error */ \
else if (v.Err <= _IQ(-0.5)) \
v.Err += _IQ(1.0); /* roll in the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.Ud = _IQmpy(v.Kd,(v.Up - v.Up1)); \
v.OutPreSat= v.Up + v.Ui + v.Ud; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up;
#endif // __PIDREG3_H__
// Add the lines below if derivative output is needed following the integral update
位置在ti\controlSUITE\libs\app_libs\motor_control\math_blocks\v4.3/
在给出的文档中似乎没有对这个的说明(看大家用的这个,也打算用这个。把Kd设为0就是PI了吧)
1、Kc,积分校正增益,没明白是什么作用
2、这个是增量式PID吗?
3、SatErr,饱和差,好像是v->SatErr = v->Out – v->OutPreSat;,但不知道什么用
4、v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr);也即是// Compute the integral output
v->Ui = v->Ui +v->Ki*v->Up + v->Kc*v->SatErr;其中的v->Kc*v->SatErr;怎么理解啊,为什么加上v->Ki*v->Up + v->Kc*v->SatErr,加上当前误差乘以Ki不就可以了吗?
5、// Compute the derivative output
v->Ud = v->Kd*(v->Up – v->Up1);计算微分的时候为什么用的是比例输出。
6、_iq换成了float32, _IQ(1.3)换成1.3也可以吧。想换成浮点型的。
谢谢
JLDN:
回复 user78960159:
你好!
请问pid_reg3.pdf的位置在哪里?谢谢!
/* ==================================================================================
File name:PID_REG3.H (IQ version)
=====================================================================================*/
#ifndef __PIDREG3_H__
#define __PIDREG3_H__
typedef struct { _iq Ref; // Input: Reference input_iq Fdb; // Input: Feedback input_iq Err; // Variable: Error_iq Kp; // Parameter: Proportional gain_iq Up; // Variable: Proportional output_iq Ui; // Variable: Integral output_iq Ud; // Variable: Derivative output_iq OutPreSat; // Variable: Pre-saturated output_iq OutMax;// Parameter: Maximum output_iq OutMin; // Parameter: Minimum output_iq Out; // Output: PID output_iq SatErr; // Variable: Saturated difference_iq Ki;// Parameter: Integral gain_iq Kc; // Parameter: Integral correction gain_iq Kd;// Parameter: Derivative gain_iq Up1;// History: Previous proportional output } PIDREG3;
typedef PIDREG3 *PIDREG3_handle;
/*-----------------------------------------------------------------------------
Default initalizer for the PIDREG3 object.
-----------------------------------------------------------------------------*/
#define PIDREG3_DEFAULTS { 0, \0, \0, \_IQ(1.3), \0, \0, \0, \0, \_IQ(1), \_IQ(-1), \0, \0, \_IQ(0.02), \_IQ(0.5), \_IQ(1.05), \0, \}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_REG3_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.OutPreSat= v.Up + v.Ui; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up; /* Update the previous proportional output */
#define PID_REG3_POS_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
if (v.Err >= _IQ(0.5)) \
v.Err -= _IQ(1.0); /* roll in the error */ \
else if (v.Err <= _IQ(-0.5)) \
v.Err += _IQ(1.0); /* roll in the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.Ud = _IQmpy(v.Kd,(v.Up - v.Up1)); \
v.OutPreSat= v.Up + v.Ui + v.Ud; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up;
#endif // __PIDREG3_H__
// Add the lines below if derivative output is needed following the integral update
位置在ti\controlSUITE\libs\app_libs\motor_control\math_blocks\v4.3/
在给出的文档中似乎没有对这个的说明(看大家用的这个,也打算用这个。把Kd设为0就是PI了吧)
1、Kc,积分校正增益,没明白是什么作用
2、这个是增量式PID吗?
3、SatErr,饱和差,好像是v->SatErr = v->Out – v->OutPreSat;,但不知道什么用
4、v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr);也即是// Compute the integral output
v->Ui = v->Ui +v->Ki*v->Up + v->Kc*v->SatErr;其中的v->Kc*v->SatErr;怎么理解啊,为什么加上v->Ki*v->Up + v->Kc*v->SatErr,加上当前误差乘以Ki不就可以了吗?
5、// Compute the derivative output
v->Ud = v->Kd*(v->Up – v->Up1);计算微分的时候为什么用的是比例输出。
6、_iq换成了float32, _IQ(1.3)换成1.3也可以吧。想换成浮点型的。
谢谢
user78960159:
回复 JLDN:
sprc077
下这个装下 在DOC里
/* ==================================================================================
File name:PID_REG3.H (IQ version)
=====================================================================================*/
#ifndef __PIDREG3_H__
#define __PIDREG3_H__
typedef struct { _iq Ref; // Input: Reference input_iq Fdb; // Input: Feedback input_iq Err; // Variable: Error_iq Kp; // Parameter: Proportional gain_iq Up; // Variable: Proportional output_iq Ui; // Variable: Integral output_iq Ud; // Variable: Derivative output_iq OutPreSat; // Variable: Pre-saturated output_iq OutMax;// Parameter: Maximum output_iq OutMin; // Parameter: Minimum output_iq Out; // Output: PID output_iq SatErr; // Variable: Saturated difference_iq Ki;// Parameter: Integral gain_iq Kc; // Parameter: Integral correction gain_iq Kd;// Parameter: Derivative gain_iq Up1;// History: Previous proportional output } PIDREG3;
typedef PIDREG3 *PIDREG3_handle;
/*-----------------------------------------------------------------------------
Default initalizer for the PIDREG3 object.
-----------------------------------------------------------------------------*/
#define PIDREG3_DEFAULTS { 0, \0, \0, \_IQ(1.3), \0, \0, \0, \0, \_IQ(1), \_IQ(-1), \0, \0, \_IQ(0.02), \_IQ(0.5), \_IQ(1.05), \0, \}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_REG3_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.OutPreSat= v.Up + v.Ui; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up; /* Update the previous proportional output */
#define PID_REG3_POS_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
if (v.Err >= _IQ(0.5)) \
v.Err -= _IQ(1.0); /* roll in the error */ \
else if (v.Err <= _IQ(-0.5)) \
v.Err += _IQ(1.0); /* roll in the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.Ud = _IQmpy(v.Kd,(v.Up - v.Up1)); \
v.OutPreSat= v.Up + v.Ui + v.Ud; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up;
#endif // __PIDREG3_H__
// Add the lines below if derivative output is needed following the integral update
位置在ti\controlSUITE\libs\app_libs\motor_control\math_blocks\v4.3/
在给出的文档中似乎没有对这个的说明(看大家用的这个,也打算用这个。把Kd设为0就是PI了吧)
1、Kc,积分校正增益,没明白是什么作用
2、这个是增量式PID吗?
3、SatErr,饱和差,好像是v->SatErr = v->Out – v->OutPreSat;,但不知道什么用
4、v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr);也即是// Compute the integral output
v->Ui = v->Ui +v->Ki*v->Up + v->Kc*v->SatErr;其中的v->Kc*v->SatErr;怎么理解啊,为什么加上v->Ki*v->Up + v->Kc*v->SatErr,加上当前误差乘以Ki不就可以了吗?
5、// Compute the derivative output
v->Ud = v->Kd*(v->Up – v->Up1);计算微分的时候为什么用的是比例输出。
6、_iq换成了float32, _IQ(1.3)换成1.3也可以吧。想换成浮点型的。
谢谢
feng shi:
回复 user78960159:
好的好的,我看下,非常感谢您,谢谢