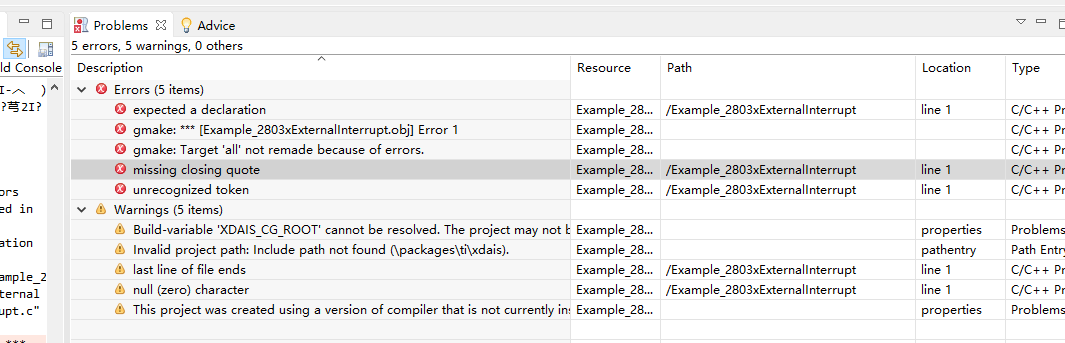
如下这代码 分别直接下载在外部RAM仿真和下载到FLASH后复制到外部RAM运行 出现 以下问题
/*=====================================================================================
File name: DWIN_USART_HMI.C
Description:
File name: DWIN_USART_HMI.C
Description:
=====================================================================================*/
#include "DSP2833x_Device.h"
#include "DSP2833x_Examples.h"
#include "DSP2833x_GlobalPrototypes.h"
#include "IQmathLib.h"
#include "DSP2833x_Examples.h"
#include "DSP2833x_GlobalPrototypes.h"
#include "IQmathLib.h"
void DWIN_USART_HMI(void);
void UART_Send_Start(void);
void UART_Send_dwin(float32 val,int16 address );
void motor_run(void );
void motor_stop(void );
extern void dwin_Oscilloscope(float32 val,int16 address );
extern void Return_instruction(void );
extern void Page_number8 (void);
void Page_number8 (void);
extern void UART_Send_dwin(float32 val,int16 address );
extern void UART_Send_Start(void);
void dwin_Oscilloscope(float32 val,int16 address );
void UART_Send_Start(void);
void UART_Send_dwin(float32 val,int16 address );
void motor_run(void );
void motor_stop(void );
extern void dwin_Oscilloscope(float32 val,int16 address );
extern void Return_instruction(void );
extern void Page_number8 (void);
void Page_number8 (void);
extern void UART_Send_dwin(float32 val,int16 address );
extern void UART_Send_Start(void);
void dwin_Oscilloscope(float32 val,int16 address );
/*—————————————————————————–
input
—————————————————————————–*/
input
—————————————————————————–*/
/*—————————————————————————–
data
—————————————————————————–*/
data
—————————————————————————–*/
extern float32 SpeedRpm;
extern float32 theta_elec; // Output: Motor Electrical angle
extern float32 theta_mech; // Output: Motor Mechanical Angle
/*————————-电流模拟变量———————–*/
extern float32 La; //输出A相电流 DMABuf1[3]
extern float32 Lb; //输出B相电流 DMABuf1[4]
extern float32 Lc; //输出C相电流 DMABuf1[1]
/*————————-电压模拟变量———————–*/
extern float32 Ua; //输出A相电压 DMABuf1[7]
extern float32 Ub; //输出B相电压 DMABuf1[5]
extern float32 Uc; //输出C相电压 DMABuf1[6]
/*————————-频率———————–*/
extern float32 Outputfre;
extern float32 theta_elec; // Output: Motor Electrical angle
extern float32 theta_mech; // Output: Motor Mechanical Angle
/*————————-电流模拟变量———————–*/
extern float32 La; //输出A相电流 DMABuf1[3]
extern float32 Lb; //输出B相电流 DMABuf1[4]
extern float32 Lc; //输出C相电流 DMABuf1[1]
/*————————-电压模拟变量———————–*/
extern float32 Ua; //输出A相电压 DMABuf1[7]
extern float32 Ub; //输出B相电压 DMABuf1[5]
extern float32 Uc; //输出C相电压 DMABuf1[6]
/*————————-频率———————–*/
extern float32 Outputfre;
/*—————————————————————————–
output
—————————————————————————–*/
extern char SCIBTXBuf[8];
extern char SCIBRXBuf[8];
extern char SCICTXBuf[8];
extern char SCICRXBuf[8];
output
—————————————————————————–*/
extern char SCIBTXBuf[8];
extern char SCIBRXBuf[8];
extern char SCICTXBuf[8];
extern char SCICRXBuf[8];
/*—————————————————————————–
internal
—————————————————————————–*/
extern int16 Timer0IntCount;
Uint16 address_number = 0;
Uint16 DADT_number = 0;
Uint16 Page_number = 1;
extern Uint16 Motor_switch ;
extern char SCIRXBuf[8];
char SCITXBuf[8];
internal
—————————————————————————–*/
extern int16 Timer0IntCount;
Uint16 address_number = 0;
Uint16 DADT_number = 0;
Uint16 Page_number = 1;
extern Uint16 Motor_switch ;
extern char SCIRXBuf[8];
char SCITXBuf[8];
/*—————————————————————————–
DWIN_USART_HMI.c
—————————————————————————–*/
DWIN_USART_HMI.c
—————————————————————————–*/
void DWIN_USART_HMI(void)
{
{
if(address_number >= DADT_number) address_number = 0;
Return_instruction();
Page_number8 ();
if(Page_number == 1) //Home Page
{
Page_number8 ();
if(Page_number == 1) //Home Page
{
if(Motor_switch == 1)
{
DADT_number = 5;
if(Timer0IntCount == 1&&address_number == 0)motor_run();
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(SpeedRpm,0x1110);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(Outputfre,0x1010);
if(Timer0IntCount == 1&&address_number == 3)UART_Send_dwin(0,0×1140);//Motor_switch
if(Timer0IntCount == 1&&address_number == 4)UART_Send_dwin(1,0×1141);//Motor_switch
}
if(Motor_switch == 0)
{
{
DADT_number = 5;
if(Timer0IntCount == 1&&address_number == 0)motor_run();
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(SpeedRpm,0x1110);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(Outputfre,0x1010);
if(Timer0IntCount == 1&&address_number == 3)UART_Send_dwin(0,0×1140);//Motor_switch
if(Timer0IntCount == 1&&address_number == 4)UART_Send_dwin(1,0×1141);//Motor_switch
}
if(Motor_switch == 0)
{
DADT_number = 5;
if(Timer0IntCount == 1&&address_number == 0)motor_stop();
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(0,0×1110);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(0,0×1010);
if(Timer0IntCount == 1&&address_number == 3)UART_Send_dwin(1,0×1140);//Motor_switch
if(Timer0IntCount == 1&&address_number == 4)UART_Send_dwin(0,0×1141);//Motor_switch
}
}
if(Page_number == 2) //Voltage page
{
DADT_number = 3;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(Ua,0x1190);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(Ub,0x11A0);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(Uc,0x11B0);
}
if(Page_number == 3) //Current page
{
DADT_number = 3;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(La,0x129C);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(Lb,0x12AC);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(Lc,0x12BC);
}
if(Page_number == 4) //Angular velocity page
{
DADT_number = 3;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x13C0);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x13D0);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x13E0);
}
if(Page_number == 5) //Torque page
{
DADT_number = 3;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x14D0);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x14E0);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x14F0);
}
if(Page_number == 6) //Flux linkage page
{
DADT_number = 3;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x15DD);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x15ED);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x15FD);
}
if(Page_number == 7) //Output setting page
{
DADT_number = 5;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x1710);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x1720);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x1730);
if(Timer0IntCount == 1&&address_number == 3)UART_Send_dwin(theta_mech,0x1740);
if(Timer0IntCount == 1&&address_number == 4)UART_Send_dwin(theta_mech,0x1750);
}
/*
if(Page_number == 8) //Output setting page
{
DADT_number = 6;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x1835);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x1845);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x1855);
if(Timer0IntCount == 1&&address_number == 3)UART_Send_dwin(theta_mech,0x1865);
if(Timer0IntCount == 1&&address_number == 4)UART_Send_dwin(theta_mech,0x1875);
if(Timer0IntCount == 1&&address_number == 5)UART_Send_dwin(theta_mech,0x1885);
}
*/
if(Timer0IntCount == 1&&address_number == 0)motor_stop();
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(0,0×1110);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(0,0×1010);
if(Timer0IntCount == 1&&address_number == 3)UART_Send_dwin(1,0×1140);//Motor_switch
if(Timer0IntCount == 1&&address_number == 4)UART_Send_dwin(0,0×1141);//Motor_switch
}
}
if(Page_number == 2) //Voltage page
{
DADT_number = 3;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(Ua,0x1190);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(Ub,0x11A0);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(Uc,0x11B0);
}
if(Page_number == 3) //Current page
{
DADT_number = 3;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(La,0x129C);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(Lb,0x12AC);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(Lc,0x12BC);
}
if(Page_number == 4) //Angular velocity page
{
DADT_number = 3;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x13C0);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x13D0);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x13E0);
}
if(Page_number == 5) //Torque page
{
DADT_number = 3;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x14D0);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x14E0);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x14F0);
}
if(Page_number == 6) //Flux linkage page
{
DADT_number = 3;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x15DD);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x15ED);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x15FD);
}
if(Page_number == 7) //Output setting page
{
DADT_number = 5;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x1710);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x1720);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x1730);
if(Timer0IntCount == 1&&address_number == 3)UART_Send_dwin(theta_mech,0x1740);
if(Timer0IntCount == 1&&address_number == 4)UART_Send_dwin(theta_mech,0x1750);
}
/*
if(Page_number == 8) //Output setting page
{
DADT_number = 6;
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x1835);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x1845);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x1855);
if(Timer0IntCount == 1&&address_number == 3)UART_Send_dwin(theta_mech,0x1865);
if(Timer0IntCount == 1&&address_number == 4)UART_Send_dwin(theta_mech,0x1875);
if(Timer0IntCount == 1&&address_number == 5)UART_Send_dwin(theta_mech,0x1885);
}
*/
}
/*—————————————————————————–
UART_Send_Start.c
—————————————————————————–*/
/*—————————————————————————–
UART_Send_Start.c
—————————————————————————–*/
void UART_Send_Start(void)
{
Uint16 K=0;
for(K=0;K<8;K++)
{
SCIBTXBuf[K] = SCITXBuf[K];
SCICTXBuf[K] = SCITXBuf[K];
}
{
Uint16 K=0;
for(K=0;K<8;K++)
{
SCIBTXBuf[K] = SCITXBuf[K];
SCICTXBuf[K] = SCITXBuf[K];
}
ScibRegs.SCIFFTX.bit.TXFFINTCLR = 1;
ScicRegs.SCIFFTX.bit.TXFFINTCLR = 1;
Timer0IntCount = 0;
address_number++;
ScicRegs.SCIFFTX.bit.TXFFINTCLR = 1;
Timer0IntCount = 0;
address_number++;
}
/*—————————————————————————–
UART_Send_dwin.c
—————————————————————————–*/
UART_Send_dwin.c
—————————————————————————–*/
void UART_Send_dwin(float32 val,int16 address )
{
Uint16 temp=0,j;
temp = (int32) _IQtoF(_IQmpy(_IQ(val),_IQ(10)));
for(j=0;j<8;j++) {SCITXBuf[j] = 0;}
SCITXBuf[0] = 0x5A;
SCITXBuf[1] = 0xA5;
SCITXBuf[2] = 0x05;
SCITXBuf[3] = 0x82;
SCITXBuf[4] = address>>8;
SCITXBuf[5] = address;
SCITXBuf[6] = temp>>8 ;
SCITXBuf[7] = temp;
{
Uint16 temp=0,j;
temp = (int32) _IQtoF(_IQmpy(_IQ(val),_IQ(10)));
for(j=0;j<8;j++) {SCITXBuf[j] = 0;}
SCITXBuf[0] = 0x5A;
SCITXBuf[1] = 0xA5;
SCITXBuf[2] = 0x05;
SCITXBuf[3] = 0x82;
SCITXBuf[4] = address>>8;
SCITXBuf[5] = address;
SCITXBuf[6] = temp>>8 ;
SCITXBuf[7] = temp;
UART_Send_Start();
}
}
void motor_run(void )
{
SCITXBuf[0] = 0x5A;
SCITXBuf[1] = 0xA5;
SCITXBuf[2] = 0x05;
SCITXBuf[3] = 0x82;
SCITXBuf[4] = 0x10;
SCITXBuf[5] = 0x00;
SCITXBuf[6] = 0x00 ;
SCITXBuf[7] = 0x01;
UART_Send_Start();
}
void motor_stop(void )
{
SCITXBuf[0] = 0x5A;
SCITXBuf[1] = 0xA5;
SCITXBuf[2] = 0x05;
SCITXBuf[3] = 0x82;
SCITXBuf[4] = 0x10;
SCITXBuf[5] = 0x00;
SCITXBuf[6] = 0x00 ;
SCITXBuf[7] = 0x00;
UART_Send_Start();
}
{
SCITXBuf[0] = 0x5A;
SCITXBuf[1] = 0xA5;
SCITXBuf[2] = 0x05;
SCITXBuf[3] = 0x82;
SCITXBuf[4] = 0x10;
SCITXBuf[5] = 0x00;
SCITXBuf[6] = 0x00 ;
SCITXBuf[7] = 0x01;
UART_Send_Start();
}
void motor_stop(void )
{
SCITXBuf[0] = 0x5A;
SCITXBuf[1] = 0xA5;
SCITXBuf[2] = 0x05;
SCITXBuf[3] = 0x82;
SCITXBuf[4] = 0x10;
SCITXBuf[5] = 0x00;
SCITXBuf[6] = 0x00 ;
SCITXBuf[7] = 0x00;
UART_Send_Start();
}
这个C文件 用CCS6.0编译通过 仿真或下载后 运行就会进非法中断
若随便屏蔽5-6行后 仿真或下载运行都恢复正常
屏蔽
SCITXBuf[1] = 0xA5;
SCITXBuf[2] = 0x05;
SCITXBuf[3] = 0x82;
SCITXBuf[4] = 0x10;
SCITXBuf[5] = 0x00;
SCITXBuf[6] = 0x00 ;
SCITXBuf[7] = 0x00;
SCITXBuf[2] = 0x05;
SCITXBuf[3] = 0x82;
SCITXBuf[4] = 0x10;
SCITXBuf[5] = 0x00;
SCITXBuf[6] = 0x00 ;
SCITXBuf[7] = 0x00;
或屏蔽
if(Timer0IntCount == 1&&address_number == 0)UART_Send_dwin(theta_mech,0x1835);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x1845);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x1855);
if(Timer0IntCount == 1&&address_number == 3)UART_Send_dwin(theta_mech,0x1865);
if(Timer0IntCount == 1&&address_number == 4)UART_Send_dwin(theta_mech,0x1875);
if(Timer0IntCount == 1&&address_number == 5)UART_Send_dwin(theta_mech,0x1885);
if(Timer0IntCount == 1&&address_number == 1)UART_Send_dwin(theta_elec,0x1845);
if(Timer0IntCount == 1&&address_number == 2)UART_Send_dwin(SpeedRpm,0x1855);
if(Timer0IntCount == 1&&address_number == 3)UART_Send_dwin(theta_mech,0x1865);
if(Timer0IntCount == 1&&address_number == 4)UART_Send_dwin(theta_mech,0x1875);
if(Timer0IntCount == 1&&address_number == 5)UART_Send_dwin(theta_mech,0x1885);
仿真或下载运行都恢复正常
或者将屏蔽的代码拆分到新的C文件中 则全部运行正常
之前也碰到一样的问题 通过拆分几个C文件后都正常运行
Johnson Chen1:
有没有试过其它版本编译器是否有同样问题?是否有调试看一下运行到哪条指令后进入非法中断?