#include "DSP2833x_Device.h" // DSP2833x Headerfile Include File
#include "DSP2833x_Examples.h" // DSP2833x Examples Include File
#include "DSP28x_Project.h" // Device Headerfile and Examples Include File
// PWM start parameters
Uint16 *ExRamStart = (Uint16 *)0x100000;
void InitEPwm1Example(void);
void InitEPwm2Example(void);
void InitEPwm3Example(void);
void Adcsample(void);
Uint32 EPwm1TimerIntCount;
Uint32 EPwm2TimerIntCount;
Uint32 EPwm3TimerIntCount;
Uint16 EPwm1_DB_Direction;
Uint16 EPwm2_DB_Direction;
Uint16 EPwm3_DB_Direction;
#include "DSP2833x_Examples.h" // DSP2833x Examples Include File
#include "DSP28x_Project.h" // Device Headerfile and Examples Include File
// PWM start parameters
Uint16 *ExRamStart = (Uint16 *)0x100000;
void InitEPwm1Example(void);
void InitEPwm2Example(void);
void InitEPwm3Example(void);
void Adcsample(void);
Uint32 EPwm1TimerIntCount;
Uint32 EPwm2TimerIntCount;
Uint32 EPwm3TimerIntCount;
Uint16 EPwm1_DB_Direction;
Uint16 EPwm2_DB_Direction;
Uint16 EPwm3_DB_Direction;
#define EPWM1_MAX_DB 0x03FF
#define EPWM2_MAX_DB 0x03FF
#define EPWM3_MAX_DB 0x03FF
#define EPWM2_MAX_DB 0x03FF
#define EPWM3_MAX_DB 0x03FF
#define EPWM1_MIN_DB 0
#define EPWM2_MIN_DB 0
#define EPWM3_MIN_DB 0
#define EPWM2_MIN_DB 0
#define EPWM3_MIN_DB 0
#define DB_UP 1
#define DB_DOWN 0
#define DB_DOWN 0
// ADC start parameters
#if (CPU_FRQ_150MHZ) // Default – 150 ===========================================================================================================================MHz SYSCLKOUT
#define ADC_MODCLK 0x3 // HSPCLK = SYSCLKOUT/2*ADC_MODCLK2 = 150/(2*3) = 25.0 MHz
#endif
#if (CPU_FRQ_100MHZ)
#define ADC_MODCLK 0x2 // HSPCLK = SYSCLKOUT/2*ADC_MODCLK2 = 100/(2*2) = 25.0 MHz
#endif
#define ADC_CKPS 0x0 // ADC module clock = HSPCLK/1 = 25.5MHz/(1) = 25.0 MHz
#define ADC_SHCLK 0x1 // S/H width in ADC module periods = 2 ADC cycle
#define AVG 1000 // Average sample limit
#define ZOFFSET 0x00 // Average Zero offset
#define BUF_SIZE 512 // Sample buffer size
#if (CPU_FRQ_150MHZ) // Default – 150 ===========================================================================================================================MHz SYSCLKOUT
#define ADC_MODCLK 0x3 // HSPCLK = SYSCLKOUT/2*ADC_MODCLK2 = 150/(2*3) = 25.0 MHz
#endif
#if (CPU_FRQ_100MHZ)
#define ADC_MODCLK 0x2 // HSPCLK = SYSCLKOUT/2*ADC_MODCLK2 = 100/(2*2) = 25.0 MHz
#endif
#define ADC_CKPS 0x0 // ADC module clock = HSPCLK/1 = 25.5MHz/(1) = 25.0 MHz
#define ADC_SHCLK 0x1 // S/H width in ADC module periods = 2 ADC cycle
#define AVG 1000 // Average sample limit
#define ZOFFSET 0x00 // Average Zero offset
#define BUF_SIZE 512 // Sample buffer size
// Prototype statements for functions found within this file.
__interrupt void adc_isr(void);
__interrupt void adc_isr(void);
// Global variables used in this example:
Uint16 LoopCount;
Uint16 ConversionCount;
Uint16 Voltage1[10];
Uint16 Voltage2[10];
void main(void)
{
Uint16 LoopCount;
Uint16 ConversionCount;
Uint16 Voltage1[10];
Uint16 Voltage2[10];
void main(void)
{
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the DSP2833x_SysCtrl.c file.
int i;
InitSysCtrl();
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the DSP2833x_SysCtrl.c file.
int i;
InitSysCtrl();
// Step 2. Initalize GPIO:
// This example function is found in the DSP2833x_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
// InitGpio(); // Skipped for this example
InitEPwm1Gpio();
InitEPwm2Gpio();
InitEPwm3Gpio();
//zq
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
DINT;
// This example function is found in the DSP2833x_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
// InitGpio(); // Skipped for this example
InitEPwm1Gpio();
InitEPwm2Gpio();
InitEPwm3Gpio();
//zq
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
DINT;
// Initialize the PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the DSP2833x_PieCtrl.c file.
InitPieCtrl();
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the DSP2833x_PieCtrl.c file.
InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags:
IER = 0x0000;
IFR = 0x0000;
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in DSP2833x_DefaultIsr.c.
// This function is found in DSP2833x_PieVect.c.
InitPieVectTable();
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in DSP2833x_DefaultIsr.c.
// This function is found in DSP2833x_PieVect.c.
InitPieVectTable();
EALLOW; // This is needed to write to EALLOW protected register
PieVectTable.ADCINT = &adc_isr;
EDIS; // This is needed to disable write to EALLOW protected registers
PieVectTable.ADCINT = &adc_isr;
EDIS; // This is needed to disable write to EALLOW protected registers
InitAdc(); // For this example, init the ADC
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
// ISR functions found within this file.
// StartCpuTimer0();
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
Adcsample();
InitEPwm1Example();
InitEPwm2Example();
InitEPwm3Example();
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
Adcsample();
InitEPwm1Example();
InitEPwm2Example();
InitEPwm3Example();
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
EALLOW;
SysCtrlRegs.HISPCP.all = ADC_MODCLK; // HSPCLK = SYSCLKOUT/ADC_MODCLK
EDIS;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
EALLOW;
SysCtrlRegs.HISPCP.all = ADC_MODCLK; // HSPCLK = SYSCLKOUT/ADC_MODCLK
EDIS;
// Step 5. User specific code, enable interrupts
// Initalize counters:
EPwm1TimerIntCount = 0;
EPwm2TimerIntCount = 0;
EPwm3TimerIntCount = 0;
// Initalize counters:
EPwm1TimerIntCount = 0;
EPwm2TimerIntCount = 0;
EPwm3TimerIntCount = 0;
// Enable CPU INT3 which is connected to EPWM1-3 INT:
//IER |= M_INT3;
//IER |= M_INT3;
// Enable EPWM INTn in the PIE: Group 3 interrupt 1-3
//PieCtrlRegs.PIEIER3.bit.INTx1 = 1;
//PieCtrlRegs.PIEIER3.bit.INTx2 = 1;
//PieCtrlRegs.PIEIER3.bit.INTx3 = 1;
//PieCtrlRegs.PIEIER3.bit.INTx1 = 1;
//PieCtrlRegs.PIEIER3.bit.INTx2 = 1;
//PieCtrlRegs.PIEIER3.bit.INTx3 = 1;
// Enable ADCINT in PIE
PieCtrlRegs.PIEIER1.bit.INTx6 = 1;
PieCtrlRegs.PIEIER1.bit.INTx6 = 1;
IER |= M_INT1; // Enable CPU Interrupt 1
// Enable global Interrupts and higher priority real-time debug events:
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
LoopCount = 0;
ConversionCount = 0;
ConversionCount = 0;
// Step 6. IDLE loop. Just sit and loop forever (optional):
for(;;)
{
asm(" NOP");
for(i=1;i<=10;i++)
{}
}
}
//ADC模块
void Adcsample()
{
for(;;)
{
asm(" NOP");
for(i=1;i<=10;i++)
{}
}
}
//ADC模块
void Adcsample()
{
// Specific ADC setup for this example:
//AdcRegs.ADCTRL1.bit.ACQ_PS = 0xff; // Sequential mode: Sample rate = 1/[(2+ACQ_PS)*ADC clock in ns]
// = 1/(3*40ns) =8.3MHz (for 150 MHz SYSCLKOUT)
// = 1/(3*80ns) =4.17MHz (for 100 MHz SYSCLKOUT)
// If Simultaneous mode enabled: Sample rate = 1/[(3+ACQ_PS)*ADC clock in ns]
AdcRegs.ADCTRL3.bit.ADCCLKPS = ADC_CKPS;
//AdcRegs.ADCTRL1.bit.SEQ_CASC = 1; // 1 Cascaded mode
AdcRegs.ADCCHSELSEQ1.bit.CONV00 = 0x0; // Setup ADCINA3 as 1st SEQ1 conv.
AdcRegs.ADCCHSELSEQ1.bit.CONV01 = 0x0; // Setup ADCINA2 as 2nd SEQ1 conv.
//AdcRegs.ADCTRL1.bit.CONT_RUN = 1; // Setup continuous run
//AdcRegs.ADCTRL1.bit.SEQ_OVRD = 1; // Enable Sequencer override feature
AdcRegs.ADCMAXCONV.bit.MAX_CONV1 = 0x1; // convert and store in 8 results registers
AdcRegs.ADCTRL2.bit.EPWM_SOCA_SEQ1 = 1;// Enable SOCA from ePWM to start SEQ1
AdcRegs.ADCTRL2.bit.INT_ENA_SEQ1 = 1; // Enable SEQ1 interrupt (every EOS)
}
//AdcRegs.ADCTRL1.bit.ACQ_PS = 0xff; // Sequential mode: Sample rate = 1/[(2+ACQ_PS)*ADC clock in ns]
// = 1/(3*40ns) =8.3MHz (for 150 MHz SYSCLKOUT)
// = 1/(3*80ns) =4.17MHz (for 100 MHz SYSCLKOUT)
// If Simultaneous mode enabled: Sample rate = 1/[(3+ACQ_PS)*ADC clock in ns]
AdcRegs.ADCTRL3.bit.ADCCLKPS = ADC_CKPS;
//AdcRegs.ADCTRL1.bit.SEQ_CASC = 1; // 1 Cascaded mode
AdcRegs.ADCCHSELSEQ1.bit.CONV00 = 0x0; // Setup ADCINA3 as 1st SEQ1 conv.
AdcRegs.ADCCHSELSEQ1.bit.CONV01 = 0x0; // Setup ADCINA2 as 2nd SEQ1 conv.
//AdcRegs.ADCTRL1.bit.CONT_RUN = 1; // Setup continuous run
//AdcRegs.ADCTRL1.bit.SEQ_OVRD = 1; // Enable Sequencer override feature
AdcRegs.ADCMAXCONV.bit.MAX_CONV1 = 0x1; // convert and store in 8 results registers
AdcRegs.ADCTRL2.bit.EPWM_SOCA_SEQ1 = 1;// Enable SOCA from ePWM to start SEQ1
AdcRegs.ADCTRL2.bit.INT_ENA_SEQ1 = 1; // Enable SEQ1 interrupt (every EOS)
}
//PWM模块
void InitEPwm1Example()
{
{
EPwm1Regs.TBPRD =7500; // Period = 900 TBCLK counts
EPwm1Regs.TBPHS.half.TBPHS = 0; // Set Phase register to zero
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Symmetrical mode
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Master module
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO; // Sync down-stream module
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm1Regs.TBPHS.half.TBPHS = 0; // Set Phase register to zero
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Symmetrical mode
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Master module
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO; // Sync down-stream module
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm1Regs.AQCTLA.bit.CAU = AQ_SET; // set actions for EPWM1A
EPwm1Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // enable Dead-band module
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // Active Hi complementary
EPwm1Regs.DBFED = 200; // FED = 20 TBCLKs
EPwm1Regs.DBRED = 200; // RED = 20 TBCLKs
EPwm1Regs.CMPA.half.CMPA = 3750; // adjust duty for output EPWM1A
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm1Regs.AQCTLA.bit.CAU = AQ_SET; // set actions for EPWM1A
EPwm1Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // enable Dead-band module
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // Active Hi complementary
EPwm1Regs.DBFED = 200; // FED = 20 TBCLKs
EPwm1Regs.DBRED = 200; // RED = 20 TBCLKs
EPwm1Regs.CMPA.half.CMPA = 3750; // adjust duty for output EPWM1A
EPwm1Regs.ETSEL.bit.SOCAEN = 1; // Enable SOC on A group
EPwm1Regs.ETSEL.bit.SOCASEL = 4; // Select SOC from from CPMA on upcount
EPwm1Regs.ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event
}
EPwm1Regs.ETSEL.bit.SOCASEL = 4; // Select SOC from from CPMA on upcount
EPwm1Regs.ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event
}
void InitEPwm2Example()
{
EPwm2Regs.TBPRD = 7500; // Period = 900 TBCLK counts
EPwm2Regs.TBPHS.half.TBPHS = 5000; // Phase = 300/900 * 360 = 120 deg
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Symmetrical mode
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Slave module
EPwm2Regs.TBCTL.bit.PHSDIR = TB_DOWN; // Count DOWN on sync (=120 deg)
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // sync flow-through
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
{
EPwm2Regs.TBPRD = 7500; // Period = 900 TBCLK counts
EPwm2Regs.TBPHS.half.TBPHS = 5000; // Phase = 300/900 * 360 = 120 deg
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Symmetrical mode
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Slave module
EPwm2Regs.TBCTL.bit.PHSDIR = TB_DOWN; // Count DOWN on sync (=120 deg)
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // sync flow-through
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm2Regs.AQCTLA.bit.CAU = AQ_SET; // set actions for EPWM2A
EPwm2Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // enable Dead-band module
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // Active Hi Complementary
EPwm2Regs.DBFED = 20; // FED = 20 TBCLKs
EPwm2Regs.DBRED = 20; // RED = 20 TBCLKs
EPwm2Regs.CMPA.half.CMPA = 3750; // adjust duty for output EPWM1A
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm2Regs.AQCTLA.bit.CAU = AQ_SET; // set actions for EPWM2A
EPwm2Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // enable Dead-band module
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // Active Hi Complementary
EPwm2Regs.DBFED = 20; // FED = 20 TBCLKs
EPwm2Regs.DBRED = 20; // RED = 20 TBCLKs
EPwm2Regs.CMPA.half.CMPA = 3750; // adjust duty for output EPWM1A
}
void InitEPwm3Example()
{
{
EPwm3Regs.TBPRD = 7500; // Period = 900 TBCLK counts
EPwm3Regs.TBPHS.half.TBPHS = 5000; // Phase = 300/900 * 360 = 120 deg
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Symmetrical mode
EPwm3Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Slave module
EPwm3Regs.TBCTL.bit.PHSDIR = TB_UP; // Count UP on sync (=240 deg)
EPwm3Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // sync flow-through
EPwm3Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm3Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm3Regs.TBPHS.half.TBPHS = 5000; // Phase = 300/900 * 360 = 120 deg
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Symmetrical mode
EPwm3Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Slave module
EPwm3Regs.TBCTL.bit.PHSDIR = TB_UP; // Count UP on sync (=240 deg)
EPwm3Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // sync flow-through
EPwm3Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm3Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm3Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm3Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm3Regs.AQCTLA.bit.CAU = AQ_SET; // set actions for EPWM3Ai
EPwm3Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm3Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // enable Dead-band module
EPwm3Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // Active Hi complementary
EPwm3Regs.DBFED = 20; // FED = 20 TBCLKs
EPwm3Regs.DBRED = 20; // RED = 20 TBCLKs
EPwm3Regs.CMPA.half.CMPA = 3750; // adjust duty for output EPWM1A
EPwm3Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm3Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; // load on CTR=Zero
EPwm3Regs.AQCTLA.bit.CAU = AQ_SET; // set actions for EPWM3Ai
EPwm3Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm3Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // enable Dead-band module
EPwm3Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // Active Hi complementary
EPwm3Regs.DBFED = 20; // FED = 20 TBCLKs
EPwm3Regs.DBRED = 20; // RED = 20 TBCLKs
EPwm3Regs.CMPA.half.CMPA = 3750; // adjust duty for output EPWM1A
}
__interrupt void adc_isr(void)
{
Voltage1[ConversionCount] = AdcRegs.ADCRESULT0 >>4;
Voltage2[ConversionCount] = AdcRegs.ADCRESULT1 >>4;
{
Voltage1[ConversionCount] = AdcRegs.ADCRESULT0 >>4;
Voltage2[ConversionCount] = AdcRegs.ADCRESULT1 >>4;
// If 40 conversions have been logged, start over
if(ConversionCount == 9)
{
ConversionCount = 0;
}
else
{
ConversionCount++;
}
if(ConversionCount == 9)
{
ConversionCount = 0;
}
else
{
ConversionCount++;
}
// Reinitialize for next ADC sequence
AdcRegs.ADCTRL2.bit.RST_SEQ1 = 1; // Reset SEQ1
AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1; // Clear INT SEQ1 bit
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; // Acknowledge interrupt to PIE
AdcRegs.ADCTRL2.bit.RST_SEQ1 = 1; // Reset SEQ1
AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1; // Clear INT SEQ1 bit
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; // Acknowledge interrupt to PIE
return;
}
}
//===========================================================================
// No more.
//===========================================================================
// No more.
//===========================================================================
likai hu:
回复 HeiHei:
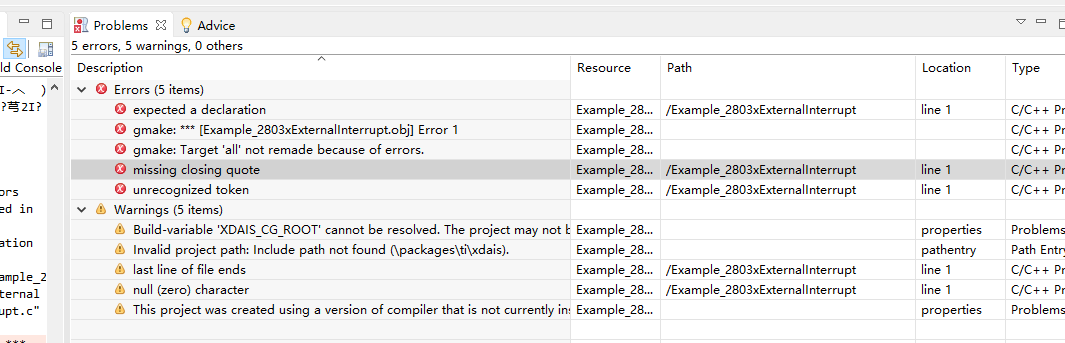
不好意思啊,我用的是ti的28335,现在通过pwm触发adc,当我采集的是恒定电压时,通过观察结果寄存器和数组发现采集的量是正确的,但是当我用函数信号发生器产生一个正弦或者锯齿波时,通过ccs6.0自带的graph无法观察到正确的波形,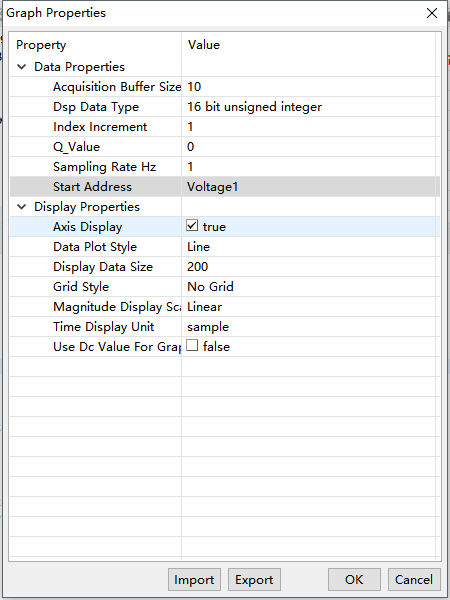
这是我具体的参数设置,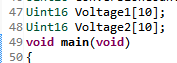 我定义的数组是无符号整型的,
我定义的数组是无符号整型的,
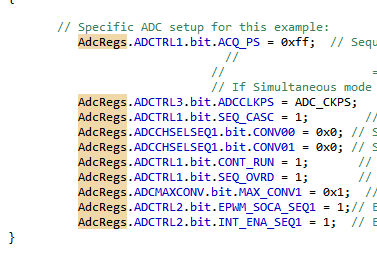 这是我寄存器的配置,
这是我寄存器的配置,
最后得出的波形却是这个样子。。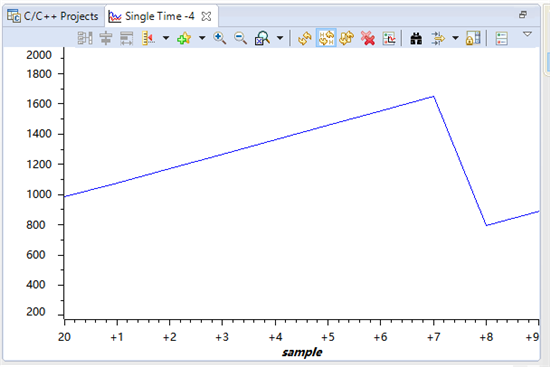
不知道是哪里出错了,希望大神帮忙看看