在使用HVPM_Enhanced_Sensorless_2803x例程中,电机空载时能良好运行,但是在电机带负载情况下,我发现一些问题:
(1)启动时带负载(轻载),电机会反向运行,而不是按给定速度方向运行;
(2)空载运行时,突加负载(轻载),电机会反向。
请问这个是例程的问题吗,或者说这个问题应该怎么解决?
望回复,非常感谢!
Igor An:
出现反转的现象可能原因主要是要看Iqref是否反向,另外要检查实际速度反馈方向是否正常。
如果是Iqref变负的问题,请检查速度环PI参数
如果是速度反馈不正常,那么请检查电机参数相关和角度补偿等smo估算器的相关内容。
在使用HVPM_Enhanced_Sensorless_2803x例程中,电机空载时能良好运行,但是在电机带负载情况下,我发现一些问题:
(1)启动时带负载(轻载),电机会反向运行,而不是按给定速度方向运行;
(2)空载运行时,突加负载(轻载),电机会反向。
请问这个是例程的问题吗,或者说这个问题应该怎么解决?
望回复,非常感谢!
mingli zhang1:
回复 Igor An:
你好,我发现iqref和速度环都没有问题;
但是遇阻反向后的估算角度和编码器得到的角度差180°。
我知道例程里的smo可能存在这个问题,但是我看说明里esmo能够实现速度的双向控制,应该不存在这个问题吧?
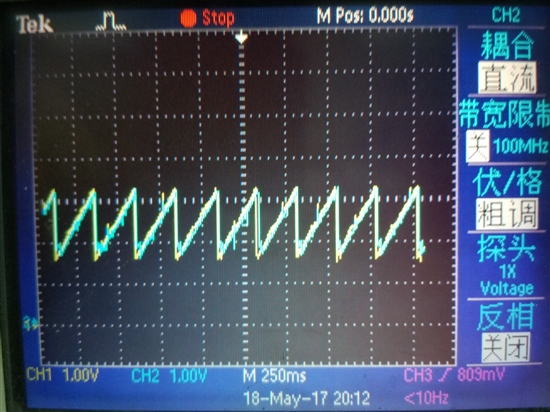
正转空载的 估算角度和编码器得到的角度
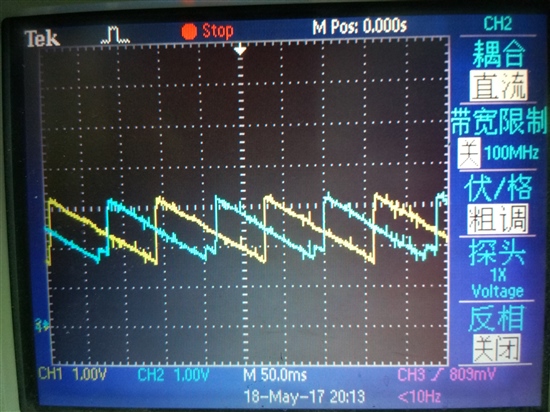
给定为正,遇阻反向后的估算角度和编码器得到的角度