最近使用controlsuite中自带的sci_echoback示例时,有一个问题一直找不到原因。示例中设置的波特率是9600,当我用串口调试助手调试,设置波特率9600,出现乱码状态,如图一所示。
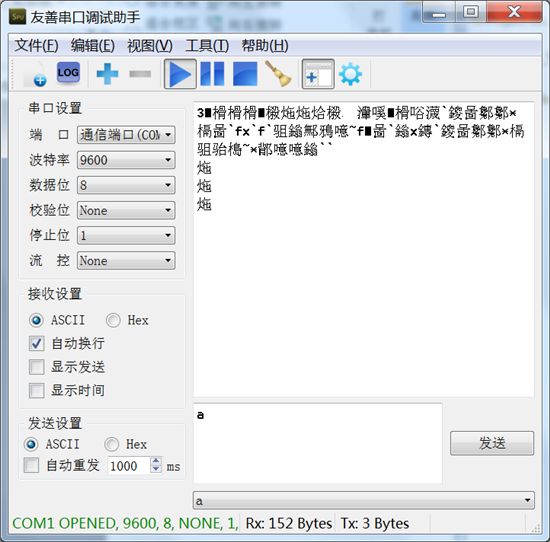
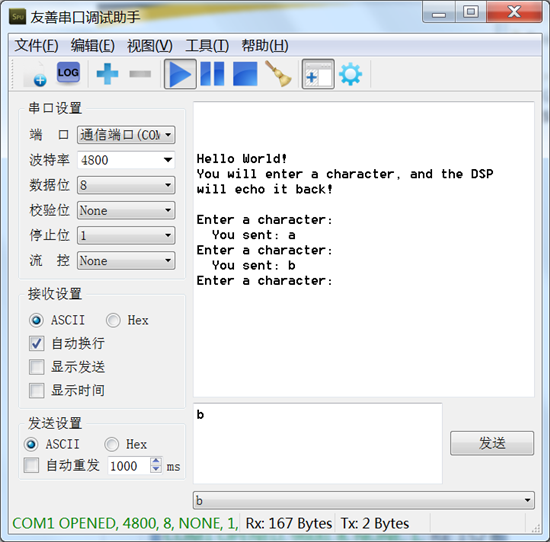
网上咨询说是波特率问题,于是将串口调试助手的波特率更改,当改为4800时,显示正常,如图二所示(程序中未做任何修改,设置的波特率根据计算公式计算也等于9600)
代码如下:
//###########################################################################
//
// FILE: Example_2837xSSci_Echoback.c
//
// TITLE: SCI Echoback.
//
//! \addtogroup cpu01_example_list
//! <h1>SCI Echoback (sci_echoback)</h1>
//!
//! This test receives and echo-backs data through the SCI-A port.
//!
//! The PC application 'hyperterminal' or another terminal
//! such as 'putty' can be used to view the data from the SCI and
//! to send information to the SCI. Characters received
//! by the SCI port are sent back to the host.
//!
//! \b Running \b the \b Application
//! -# Configure hyperterminal or another terminal such as putty:
//!
//! For hyperterminal you can use the included hyperterminal configuration
//! file SCI_96.ht.
//! To load this configuration in hyperterminal
//! -# Open hyperterminal
//! -# Go to file->open
//! -# Browse to the location of the project and
//! select the SCI_96.ht file.
//! -# Check the COM port.
//! The configuration file is currently setup for COM1.
//! If this is not correct, disconnect (Call->Disconnect)
//! Open the File-Properties dialogue and select the correct COM port.
//! -# Connect hyperterminal Call->Call
//! and then start the 2837xS SCI echoback program execution.
//! -# The program will print out a greeting and then ask you to
//! enter a character which it will echo back to hyperterminal.
//!
//! \note If you are unable to open the .ht file, or you are using
//! a different terminal, you can open a COM port with the following settings
//! – Find correct COM port
//! – Bits per second = 9600
//! – Date Bits = 8
//! – Parity = None
//! – Stop Bits = 1
//! – Hardware Control = None
//!
//! \b Watch \b Variables \n
//! – LoopCount – the number of characters sent
//!
//! \b External \b Connections \n
//! Connect the SCI-A port to a PC via a transceiver and cable.
//! – GPIO28 is SCI_A-RXD (Connect to Pin3, PC-TX, of serial DB9 cable)
//! – GPIO29 is SCI_A-TXD (Connect to Pin2, PC-RX, of serial DB9 cable)
//!
//
//###########################################################################
// $TI Release: F2837xS Support Library v210 $
// $Release Date: Tue Nov 1 15:35:23 CDT 2016 $
// $Copyright: Copyright (C) 2014-2016 Texas Instruments Incorporated –
// http://www.ti.com/ ALL RIGHTS RESERVED $
//###########################################################################
//
// Included Files
//
#include "F28x_Project.h"
//
// Globals
//
Uint16 LoopCount;
//
// Function Prototypes
//
void scia_echoback_init(void);
void scia_fifo_init(void);
void scia_xmit(int a);
void scia_msg(char *msg);
//
// Main
//
void main(void)
{
Uint16 ReceivedChar;
char *msg;
//
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xS_SysCtrl.c file.
//
InitSysCtrl();
//
// Step 2. Initialize GPIO:
// This example function is found in the F2837xS_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
//
InitGpio();
//
// For this example, only init the pins for the SCI-A port.
// GPIO_SetupPinMux() – Sets the GPxMUX1/2 and GPyMUX1/2 register bits
// GPIO_SetupPinOptions() – Sets the direction and configuration of the GPIOS
// These functions are found in the F2837xS_Gpio.c file.
//
GPIO_SetupPinMux(15, GPIO_MUX_CPU1, 2);
GPIO_SetupPinOptions(15, GPIO_INPUT, GPIO_PUSHPULL);
GPIO_SetupPinMux(14, GPIO_MUX_CPU1, 2);
GPIO_SetupPinOptions(14, GPIO_OUTPUT, GPIO_ASYNC);
//
// Step 3. Clear all __interrupts and initialize PIE vector table:
// Disable CPU __interrupts
//
DINT;
//
// Initialize PIE control registers to their default state.
// The default state is all PIE __interrupts disabled and flags
// are cleared.
// This function is found in the F2837xS_PieCtrl.c file.
//
InitPieCtrl();
//
// Disable CPU __interrupts and clear all CPU __interrupt flags:
//
IER = 0x0000;
IFR = 0x0000;
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the __interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xS_DefaultIsr.c.
// This function is found in F2837xS_PieVect.c.
//
InitPieVectTable();
//
// Step 4. User specific code:
//
LoopCount = 0;
scia_fifo_init(); // Initialize the SCI FIFO
scia_echoback_init(); // Initialize SCI for echoback
msg = "\r\n\n\nHello World!\0";
scia_msg(msg);
msg = "\r\nYou will enter a character, and the DSP will echo it back! \n\0";
scia_msg(msg);
for(;;)
{
msg = "\r\nEnter a character: \0";
scia_msg(msg);
//
// Wait for inc character
//
while(ScibRegs.SCIFFRX.bit.RXFFST == 0) { } // wait for empty state
//
// Get character
//
ReceivedChar = ScibRegs.SCIRXBUF.all;
//
// Echo character back
//
msg = " You sent: \0";
scia_msg(msg);
scia_xmit(ReceivedChar);
LoopCount++;
}
}
//
// scia_echoback_init – Test 1,SCIA DLB, 8-bit word, baud rate 0x000F,
// default, 1 STOP bit, no parity
//
void scia_echoback_init()
{
//
// Note: Clocks were turned on to the SCIA peripheral
// in the InitSysCtrl() function
//
ScibRegs.SCICCR.all = 0x0007; // 1 stop bit, No loopback
// No parity,8 char bits,
// async mode, idle-line protocol
ScibRegs.SCICTL1.all = 0x0003; // enable TX, RX, internal SCICLK,
// Disable RX ERR, SLEEP, TXWAKE
ScibRegs.SCICTL2.all = 0x0003;
ScibRegs.SCICTL2.bit.TXINTENA = 1;
ScibRegs.SCICTL2.bit.RXBKINTENA = 1;
//
// SCIA at 9600 baud
// @LSPCLK = 50 MHz (200 MHz SYSCLK) HBAUD = 0x02 and LBAUD = 0x8B.
// @LSPCLK = 30 MHz (120 MHz SYSCLK) HBAUD = 0x01 and LBAUD = 0x86.
//
ScibRegs.SCIHBAUD.all = 0x0002;
ScibRegs.SCILBAUD.all = 0x008B;
ScibRegs.SCICTL1.all = 0x0023; // Relinquish SCI from Reset
}
//
// scia_xmit – Transmit a character from the SCI
//
void scia_xmit(int a)
{
while (ScibRegs.SCIFFTX.bit.TXFFST != 0) {}
ScibRegs.SCITXBUF.all =a;
}
//
// scia_msg – Transmit message via SCIA
//
void scia_msg(char * msg)
{
int i;
i = 0;
while(msg[i] != '\0')
{
scia_xmit(msg[i]);
i++;
}
}
//
// scia_fifo_init – Initialize the SCI FIFO
//
void scia_fifo_init()
{
ScibRegs.SCIFFTX.all = 0xE040;
ScibRegs.SCIFFRX.all = 0x2044;
ScibRegs.SCIFFCT.all = 0x0;
}
//
// End of file
//
yuxuan du:
我也遇到了这个问题,我代码里面设置的是115200的波特率,最后在200MHZ系统时钟下要用他一半的波特率才可收到字符,初步怀疑一是系统时钟的问题,再一个就是波特率控制字是不是算错了?????
ScibRegs.SCIHBAUD.all = 0x0002;ScibRegs.SCILBAUD.all = 0x008B;
最近使用controlsuite中自带的sci_echoback示例时,有一个问题一直找不到原因。示例中设置的波特率是9600,当我用串口调试助手调试,设置波特率9600,出现乱码状态,如图一所示。
网上咨询说是波特率问题,于是将串口调试助手的波特率更改,当改为4800时,显示正常,如图二所示(程序中未做任何修改,设置的波特率根据计算公式计算也等于9600)
代码如下:
//###########################################################################
//
// FILE: Example_2837xSSci_Echoback.c
//
// TITLE: SCI Echoback.
//
//! \addtogroup cpu01_example_list
//! <h1>SCI Echoback (sci_echoback)</h1>
//!
//! This test receives and echo-backs data through the SCI-A port.
//!
//! The PC application 'hyperterminal' or another terminal
//! such as 'putty' can be used to view the data from the SCI and
//! to send information to the SCI. Characters received
//! by the SCI port are sent back to the host.
//!
//! \b Running \b the \b Application
//! -# Configure hyperterminal or another terminal such as putty:
//!
//! For hyperterminal you can use the included hyperterminal configuration
//! file SCI_96.ht.
//! To load this configuration in hyperterminal
//! -# Open hyperterminal
//! -# Go to file->open
//! -# Browse to the location of the project and
//! select the SCI_96.ht file.
//! -# Check the COM port.
//! The configuration file is currently setup for COM1.
//! If this is not correct, disconnect (Call->Disconnect)
//! Open the File-Properties dialogue and select the correct COM port.
//! -# Connect hyperterminal Call->Call
//! and then start the 2837xS SCI echoback program execution.
//! -# The program will print out a greeting and then ask you to
//! enter a character which it will echo back to hyperterminal.
//!
//! \note If you are unable to open the .ht file, or you are using
//! a different terminal, you can open a COM port with the following settings
//! – Find correct COM port
//! – Bits per second = 9600
//! – Date Bits = 8
//! – Parity = None
//! – Stop Bits = 1
//! – Hardware Control = None
//!
//! \b Watch \b Variables \n
//! – LoopCount – the number of characters sent
//!
//! \b External \b Connections \n
//! Connect the SCI-A port to a PC via a transceiver and cable.
//! – GPIO28 is SCI_A-RXD (Connect to Pin3, PC-TX, of serial DB9 cable)
//! – GPIO29 is SCI_A-TXD (Connect to Pin2, PC-RX, of serial DB9 cable)
//!
//
//###########################################################################
// $TI Release: F2837xS Support Library v210 $
// $Release Date: Tue Nov 1 15:35:23 CDT 2016 $
// $Copyright: Copyright (C) 2014-2016 Texas Instruments Incorporated –
// http://www.ti.com/ ALL RIGHTS RESERVED $
//###########################################################################
//
// Included Files
//
#include "F28x_Project.h"
//
// Globals
//
Uint16 LoopCount;
//
// Function Prototypes
//
void scia_echoback_init(void);
void scia_fifo_init(void);
void scia_xmit(int a);
void scia_msg(char *msg);
//
// Main
//
void main(void)
{
Uint16 ReceivedChar;
char *msg;
//
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xS_SysCtrl.c file.
//
InitSysCtrl();
//
// Step 2. Initialize GPIO:
// This example function is found in the F2837xS_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
//
InitGpio();
//
// For this example, only init the pins for the SCI-A port.
// GPIO_SetupPinMux() – Sets the GPxMUX1/2 and GPyMUX1/2 register bits
// GPIO_SetupPinOptions() – Sets the direction and configuration of the GPIOS
// These functions are found in the F2837xS_Gpio.c file.
//
GPIO_SetupPinMux(15, GPIO_MUX_CPU1, 2);
GPIO_SetupPinOptions(15, GPIO_INPUT, GPIO_PUSHPULL);
GPIO_SetupPinMux(14, GPIO_MUX_CPU1, 2);
GPIO_SetupPinOptions(14, GPIO_OUTPUT, GPIO_ASYNC);
//
// Step 3. Clear all __interrupts and initialize PIE vector table:
// Disable CPU __interrupts
//
DINT;
//
// Initialize PIE control registers to their default state.
// The default state is all PIE __interrupts disabled and flags
// are cleared.
// This function is found in the F2837xS_PieCtrl.c file.
//
InitPieCtrl();
//
// Disable CPU __interrupts and clear all CPU __interrupt flags:
//
IER = 0x0000;
IFR = 0x0000;
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the __interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xS_DefaultIsr.c.
// This function is found in F2837xS_PieVect.c.
//
InitPieVectTable();
//
// Step 4. User specific code:
//
LoopCount = 0;
scia_fifo_init(); // Initialize the SCI FIFO
scia_echoback_init(); // Initialize SCI for echoback
msg = "\r\n\n\nHello World!\0";
scia_msg(msg);
msg = "\r\nYou will enter a character, and the DSP will echo it back! \n\0";
scia_msg(msg);
for(;;)
{
msg = "\r\nEnter a character: \0";
scia_msg(msg);
//
// Wait for inc character
//
while(ScibRegs.SCIFFRX.bit.RXFFST == 0) { } // wait for empty state
//
// Get character
//
ReceivedChar = ScibRegs.SCIRXBUF.all;
//
// Echo character back
//
msg = " You sent: \0";
scia_msg(msg);
scia_xmit(ReceivedChar);
LoopCount++;
}
}
//
// scia_echoback_init – Test 1,SCIA DLB, 8-bit word, baud rate 0x000F,
// default, 1 STOP bit, no parity
//
void scia_echoback_init()
{
//
// Note: Clocks were turned on to the SCIA peripheral
// in the InitSysCtrl() function
//
ScibRegs.SCICCR.all = 0x0007; // 1 stop bit, No loopback
// No parity,8 char bits,
// async mode, idle-line protocol
ScibRegs.SCICTL1.all = 0x0003; // enable TX, RX, internal SCICLK,
// Disable RX ERR, SLEEP, TXWAKE
ScibRegs.SCICTL2.all = 0x0003;
ScibRegs.SCICTL2.bit.TXINTENA = 1;
ScibRegs.SCICTL2.bit.RXBKINTENA = 1;
//
// SCIA at 9600 baud
// @LSPCLK = 50 MHz (200 MHz SYSCLK) HBAUD = 0x02 and LBAUD = 0x8B.
// @LSPCLK = 30 MHz (120 MHz SYSCLK) HBAUD = 0x01 and LBAUD = 0x86.
//
ScibRegs.SCIHBAUD.all = 0x0002;
ScibRegs.SCILBAUD.all = 0x008B;
ScibRegs.SCICTL1.all = 0x0023; // Relinquish SCI from Reset
}
//
// scia_xmit – Transmit a character from the SCI
//
void scia_xmit(int a)
{
while (ScibRegs.SCIFFTX.bit.TXFFST != 0) {}
ScibRegs.SCITXBUF.all =a;
}
//
// scia_msg – Transmit message via SCIA
//
void scia_msg(char * msg)
{
int i;
i = 0;
while(msg[i] != '\0')
{
scia_xmit(msg[i]);
i++;
}
}
//
// scia_fifo_init – Initialize the SCI FIFO
//
void scia_fifo_init()
{
ScibRegs.SCIFFTX.all = 0xE040;
ScibRegs.SCIFFRX.all = 0x2044;
ScibRegs.SCIFFCT.all = 0x0;
}
//
// End of file
//
gezheng bao:
回复 yuxuan du:
没有算错,我算了好几遍~
最近使用controlsuite中自带的sci_echoback示例时,有一个问题一直找不到原因。示例中设置的波特率是9600,当我用串口调试助手调试,设置波特率9600,出现乱码状态,如图一所示。
网上咨询说是波特率问题,于是将串口调试助手的波特率更改,当改为4800时,显示正常,如图二所示(程序中未做任何修改,设置的波特率根据计算公式计算也等于9600)
代码如下:
//###########################################################################
//
// FILE: Example_2837xSSci_Echoback.c
//
// TITLE: SCI Echoback.
//
//! \addtogroup cpu01_example_list
//! <h1>SCI Echoback (sci_echoback)</h1>
//!
//! This test receives and echo-backs data through the SCI-A port.
//!
//! The PC application 'hyperterminal' or another terminal
//! such as 'putty' can be used to view the data from the SCI and
//! to send information to the SCI. Characters received
//! by the SCI port are sent back to the host.
//!
//! \b Running \b the \b Application
//! -# Configure hyperterminal or another terminal such as putty:
//!
//! For hyperterminal you can use the included hyperterminal configuration
//! file SCI_96.ht.
//! To load this configuration in hyperterminal
//! -# Open hyperterminal
//! -# Go to file->open
//! -# Browse to the location of the project and
//! select the SCI_96.ht file.
//! -# Check the COM port.
//! The configuration file is currently setup for COM1.
//! If this is not correct, disconnect (Call->Disconnect)
//! Open the File-Properties dialogue and select the correct COM port.
//! -# Connect hyperterminal Call->Call
//! and then start the 2837xS SCI echoback program execution.
//! -# The program will print out a greeting and then ask you to
//! enter a character which it will echo back to hyperterminal.
//!
//! \note If you are unable to open the .ht file, or you are using
//! a different terminal, you can open a COM port with the following settings
//! – Find correct COM port
//! – Bits per second = 9600
//! – Date Bits = 8
//! – Parity = None
//! – Stop Bits = 1
//! – Hardware Control = None
//!
//! \b Watch \b Variables \n
//! – LoopCount – the number of characters sent
//!
//! \b External \b Connections \n
//! Connect the SCI-A port to a PC via a transceiver and cable.
//! – GPIO28 is SCI_A-RXD (Connect to Pin3, PC-TX, of serial DB9 cable)
//! – GPIO29 is SCI_A-TXD (Connect to Pin2, PC-RX, of serial DB9 cable)
//!
//
//###########################################################################
// $TI Release: F2837xS Support Library v210 $
// $Release Date: Tue Nov 1 15:35:23 CDT 2016 $
// $Copyright: Copyright (C) 2014-2016 Texas Instruments Incorporated –
// http://www.ti.com/ ALL RIGHTS RESERVED $
//###########################################################################
//
// Included Files
//
#include "F28x_Project.h"
//
// Globals
//
Uint16 LoopCount;
//
// Function Prototypes
//
void scia_echoback_init(void);
void scia_fifo_init(void);
void scia_xmit(int a);
void scia_msg(char *msg);
//
// Main
//
void main(void)
{
Uint16 ReceivedChar;
char *msg;
//
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xS_SysCtrl.c file.
//
InitSysCtrl();
//
// Step 2. Initialize GPIO:
// This example function is found in the F2837xS_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
//
InitGpio();
//
// For this example, only init the pins for the SCI-A port.
// GPIO_SetupPinMux() – Sets the GPxMUX1/2 and GPyMUX1/2 register bits
// GPIO_SetupPinOptions() – Sets the direction and configuration of the GPIOS
// These functions are found in the F2837xS_Gpio.c file.
//
GPIO_SetupPinMux(15, GPIO_MUX_CPU1, 2);
GPIO_SetupPinOptions(15, GPIO_INPUT, GPIO_PUSHPULL);
GPIO_SetupPinMux(14, GPIO_MUX_CPU1, 2);
GPIO_SetupPinOptions(14, GPIO_OUTPUT, GPIO_ASYNC);
//
// Step 3. Clear all __interrupts and initialize PIE vector table:
// Disable CPU __interrupts
//
DINT;
//
// Initialize PIE control registers to their default state.
// The default state is all PIE __interrupts disabled and flags
// are cleared.
// This function is found in the F2837xS_PieCtrl.c file.
//
InitPieCtrl();
//
// Disable CPU __interrupts and clear all CPU __interrupt flags:
//
IER = 0x0000;
IFR = 0x0000;
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the __interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xS_DefaultIsr.c.
// This function is found in F2837xS_PieVect.c.
//
InitPieVectTable();
//
// Step 4. User specific code:
//
LoopCount = 0;
scia_fifo_init(); // Initialize the SCI FIFO
scia_echoback_init(); // Initialize SCI for echoback
msg = "\r\n\n\nHello World!\0";
scia_msg(msg);
msg = "\r\nYou will enter a character, and the DSP will echo it back! \n\0";
scia_msg(msg);
for(;;)
{
msg = "\r\nEnter a character: \0";
scia_msg(msg);
//
// Wait for inc character
//
while(ScibRegs.SCIFFRX.bit.RXFFST == 0) { } // wait for empty state
//
// Get character
//
ReceivedChar = ScibRegs.SCIRXBUF.all;
//
// Echo character back
//
msg = " You sent: \0";
scia_msg(msg);
scia_xmit(ReceivedChar);
LoopCount++;
}
}
//
// scia_echoback_init – Test 1,SCIA DLB, 8-bit word, baud rate 0x000F,
// default, 1 STOP bit, no parity
//
void scia_echoback_init()
{
//
// Note: Clocks were turned on to the SCIA peripheral
// in the InitSysCtrl() function
//
ScibRegs.SCICCR.all = 0x0007; // 1 stop bit, No loopback
// No parity,8 char bits,
// async mode, idle-line protocol
ScibRegs.SCICTL1.all = 0x0003; // enable TX, RX, internal SCICLK,
// Disable RX ERR, SLEEP, TXWAKE
ScibRegs.SCICTL2.all = 0x0003;
ScibRegs.SCICTL2.bit.TXINTENA = 1;
ScibRegs.SCICTL2.bit.RXBKINTENA = 1;
//
// SCIA at 9600 baud
// @LSPCLK = 50 MHz (200 MHz SYSCLK) HBAUD = 0x02 and LBAUD = 0x8B.
// @LSPCLK = 30 MHz (120 MHz SYSCLK) HBAUD = 0x01 and LBAUD = 0x86.
//
ScibRegs.SCIHBAUD.all = 0x0002;
ScibRegs.SCILBAUD.all = 0x008B;
ScibRegs.SCICTL1.all = 0x0023; // Relinquish SCI from Reset
}
//
// scia_xmit – Transmit a character from the SCI
//
void scia_xmit(int a)
{
while (ScibRegs.SCIFFTX.bit.TXFFST != 0) {}
ScibRegs.SCITXBUF.all =a;
}
//
// scia_msg – Transmit message via SCIA
//
void scia_msg(char * msg)
{
int i;
i = 0;
while(msg[i] != '\0')
{
scia_xmit(msg[i]);
i++;
}
}
//
// scia_fifo_init – Initialize the SCI FIFO
//
void scia_fifo_init()
{
ScibRegs.SCIFFTX.all = 0xE040;
ScibRegs.SCIFFRX.all = 0x2044;
ScibRegs.SCIFFCT.all = 0x0;
}
//
// End of file
//
rookiecalf:
回复 gezheng bao:
可以测一下系统时钟看看是多少,如果系统时钟和波特率设定都对的话是不会出现这种问题的





