利用drv 8301 revd,instaspin foc算法驱动无刷电机,TI源代码默认延时5秒后电机才运转,经过调试改启动参数,目前需要延时0.2秒才启动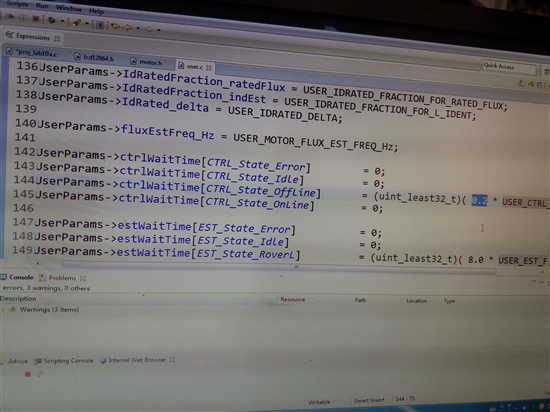 ,低于0.2秒电机启动瞬间会抖动,应该改变哪些启动参数才可以使启动延时时间控制在0.02秒以内?非常感谢!
,低于0.2秒电机启动瞬间会抖动,应该改变哪些启动参数才可以使启动延时时间控制在0.02秒以内?非常感谢!
ming chen3:
waittime 应该是进行偏置校准。
把偏置提前写进user.h.
启动时先用forceangle,大于1Hz,切换到fast.
你使能forceangle,把加速度调小一点。再试试。
我设置0.1启动也还正常。
我觉得这个启动所谓的抖动是目前无感算法不可避免的。只能说影响能否接受。
1Hz基本还算可以接受。
对启动要求太严苛的场合我觉得应该也不会选择无感吧。
利用drv 8301 revd,instaspin foc算法驱动无刷电机,TI源代码默认延时5秒后电机才运转,经过调试改启动参数,目前需要延时0.2秒才启动,低于0.2秒电机启动瞬间会抖动,应该改变哪些启动参数才可以使启动延时时间控制在0.02秒以内?非常感谢!
user4708725:
回复 ming chen3:
这款产品要求加速度非常快,由40000rpm降到0rpm约0.1秒,启动延时在0.02s以内。
利用drv 8301 revd,instaspin foc算法驱动无刷电机,TI源代码默认延时5秒后电机才运转,经过调试改启动参数,目前需要延时0.2秒才启动,低于0.2秒电机启动瞬间会抖动,应该改变哪些启动参数才可以使启动延时时间控制在0.02秒以内?非常感谢!
Eric Ma:
回复 user4708725:
把Rs re-calibration 禁止,offset cal 功能禁止,然后加速度设大。
至于测试方法,你可以弄个IO口测试一下。
利用drv 8301 revd,instaspin foc算法驱动无刷电机,TI源代码默认延时5秒后电机才运转,经过调试改启动参数,目前需要延时0.2秒才启动,低于0.2秒电机启动瞬间会抖动,应该改变哪些启动参数才可以使启动延时时间控制在0.02秒以内?非常感谢!
user4708725:
回复 Eric Ma:
offset cal 功能禁止后,无刷电机启动瞬间抖动,然后停止运行,应该怎么处理?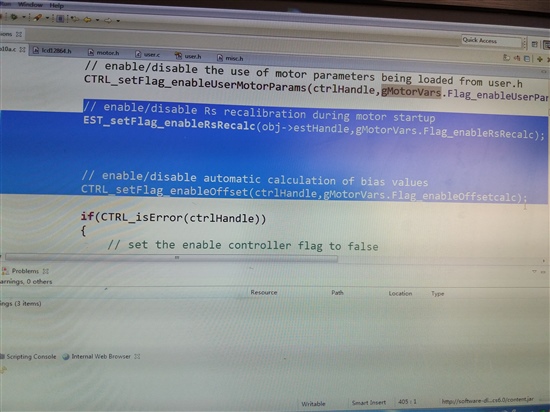
利用drv 8301 revd,instaspin foc算法驱动无刷电机,TI源代码默认延时5秒后电机才运转,经过调试改启动参数,目前需要延时0.2秒才启动,低于0.2秒电机启动瞬间会抖动,应该改变哪些启动参数才可以使启动延时时间控制在0.02秒以内?非常感谢!
Eric Ma:
回复 user4708725:
offset cal 功能禁止后,无刷电机启动瞬间抖动,然后停止运行,应该怎么处理?
Eric:
先开启这个功能,然后在offset 校准之后,通过观察halhandle里面的ADC bias ,把偏置读出来,与user.hl里面的偏置进行对比看看。要把这个偏置值写到user.h里面。
这样当offset禁止后,会去user.h中去读取这个偏置值。





