TI工程师:
您好,我用HVMotorCtrl+PfcKit套件的BLDC_Sensorless程序改到DRV830x-HC-C2-KIT套件运行,带霍尔速度闭环和无传感换向都没问题,但是当我运行无传感的速度闭环时就有问题:速度环PI反馈不能跟随给定,PI输出一直为最大限幅值,积分输出为0,不管怎么调节Kp和Ki都没用,请问这可能是什么问题?会不会是PI没调好还是什么原因,首先感谢各位的解答。
Igor An:
haibo tan1
TI工程师:
您好,我用HVMotorCtrl+PfcKit套件的BLDC_Sensorless程序改到DRV830x-HC-C2-KIT套件运行,带霍尔速度闭环和无传感换向都没问题,但是当我运行无传感的速度闭环时就有问题:速度环PI反馈不能跟随给定,PI输出一直为最大限幅值,积分输出为0,不管怎么调节Kp和Ki都没用,请问这可能是什么问题?会不会是PI没调好还是什么原因,首先感谢各位的解答。
TI工程师:
您好,我用HVMotorCtrl+PfcKit套件的BLDC_Sensorless程序改到DRV830x-HC-C2-KIT套件运行,带霍尔速度闭环和无传感换向都没问题,但是当我运行无传感的速度闭环时就有问题:速度环PI反馈不能跟随给定,PI输出一直为最大限幅值,积分输出为0,不管怎么调节Kp和Ki都没用,请问这可能是什么问题?会不会是PI没调好还是什么原因,首先感谢各位的解答。
haibo tan1:
回复 Igor An:
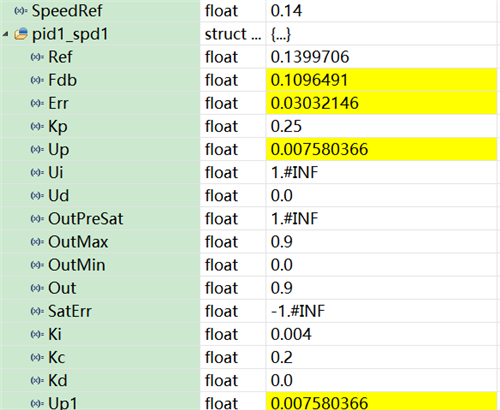
Igor An,你好,不好意思,我之前对积分输出那个符号(1.#INF)理解错了,积分输出为无穷大值,而不是0,下面为积分器的各个参数结果。
还有如果是正反馈的话我应该怎么调节?反馈回来的速度是正的。
TI工程师:
您好,我用HVMotorCtrl+PfcKit套件的BLDC_Sensorless程序改到DRV830x-HC-C2-KIT套件运行,带霍尔速度闭环和无传感换向都没问题,但是当我运行无传感的速度闭环时就有问题:速度环PI反馈不能跟随给定,PI输出一直为最大限幅值,积分输出为0,不管怎么调节Kp和Ki都没用,请问这可能是什么问题?会不会是PI没调好还是什么原因,首先感谢各位的解答。
haibo tan1:
回复 Igor An:
感谢Igor An再一次回复,问题已解决,不是积分饱和的问题,是由于无传感函数初始化有问题,导致计算反馈的速度不正确,进一步使得积分器一直饱和。
TI工程师:
您好,我用HVMotorCtrl+PfcKit套件的BLDC_Sensorless程序改到DRV830x-HC-C2-KIT套件运行,带霍尔速度闭环和无传感换向都没问题,但是当我运行无传感的速度闭环时就有问题:速度环PI反馈不能跟随给定,PI输出一直为最大限幅值,积分输出为0,不管怎么调节Kp和Ki都没用,请问这可能是什么问题?会不会是PI没调好还是什么原因,首先感谢各位的解答。
ZEJIAN CHEN:
回复 haibo tan1:
你好 ,请问无感函数初始化如何看出有问题的,我最近也遇到饱和的问题。谢谢






