在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
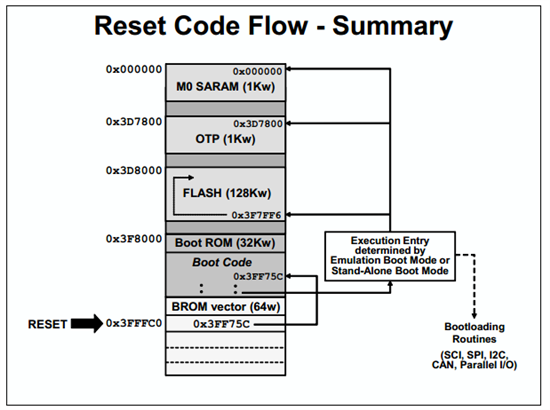
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。
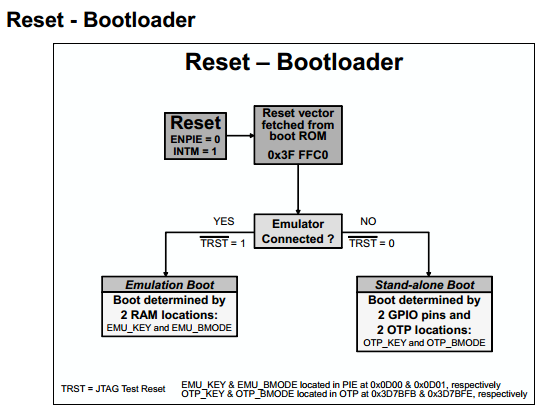
图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
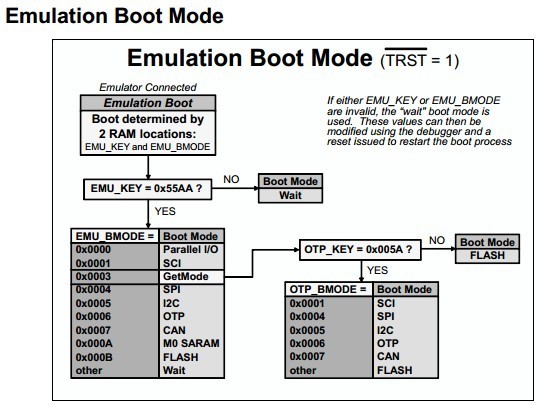
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。
Eric Ma:
4. 单机跑是引导模式配置
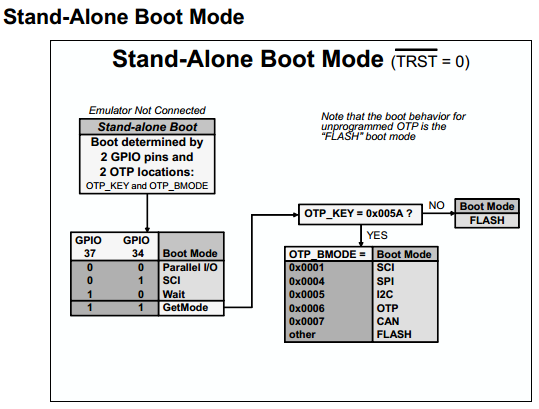
单机跑的时候,我们最常用的是跑到Flash中,这时候则需要配置GPIO34和GPIO37的引脚为高电平,由于Piccolo系列芯片这几个引导都有上电默认内部上拉使能,所以即使不用加上拉电阻也可以。这时候的引导模式是GetMode,由于我们没有去配置OTP两个单元,所以这两个单元默认为0xFFFF,所以芯片的引导模式最终为boot to Flash。
5. 其他外设的引导模式
从上面这几张图中可以看到还有许多外设引导的功能,以SCI引导为例,带仿真器和单机跑的时候,都要配置相应的存储单元以及GPIO口状态,使之配置为SCI boot mode。然后芯片会SCI boot 函数,准备接收串口的代码,上位机要根据SCI boot的通信协议,生成SCI boot的数据流格式,将数据通过串口发送给芯片,芯片的bootloader会接收该代码,接收完后会根据该数据流中的起始运行地址去开始执行从SCI下载的代码。
参考文献:
TMS320x2803x Piccolo Boot ROM reference guide

Eric
在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。
图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。
yafang lu:
您好,我纠结于这个问题很久了。我现在的跑马灯的程序带仿真器跑比不带仿真器跑快很多,还有SCI串口带仿真器时能够正常发送接收数据,不带仿真器时就是乱码了,请问是不是都是这个引起的呢?如果是这样,我应该怎么解决呢?直接加BOOTLOADER程序就可以了么?
在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。
图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。
Eric Ma:
回复 yafang lu:
yafang,
不带仿真器的时候,也即程序下载到Flash,需要对Flash进行初始化,Initflash()。 参见controlSUITE例程
C:\ti\controlSUITE\device_support\f2803x\v127\DSP2803x_examples_ccsv5\flash_f28035
另外程序在Flash上跑肯定比在RAM跑慢,如果你有些程序要求跑的比较快,那就把它copy到RAM中运行吧。
建议你从controlSUITE中的例程去开始你的工作。
至于SCI不带仿真器的时候乱码,带仿真器的时候程序是跑在RAM还是在Flash中?
我认为这个跟bootloader没有关系。
Eric
在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。
图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。
yafang lu:
回复 Eric Ma:
您好,
我已经把灯的亮灭在定时中断程序,中断程序放在RAM中运行,可是还是会出当拿掉仿真器后速度会变慢很多,附件中是我的代码,麻烦帮忙看一看
#include "DSP280x_Device.h" // DSP280x Headerfile Include File#include "DSP280x_Examples.h" // DSP280x Examples Include File
// Configure which ePWM timer interrupts are enabled at the PIE level:// 1 = enabled, 0 = disabled#define PWM3_INT_ENABLE 1
// Configure the period for each timer#define PWM3_TIMER_TBPRD 0x1FFF
// Make this long enough so that we can see an LED toggle#define DELAY 1000000L#define DELAY1 100000L
// Functions that will be run from RAM need to be assigned to // a different section. This section will then be mapped using// the linker cmd file.#pragma CODE_SECTION(epwm3_timer_isr, "ramfuncs");// Prototype statements for functions found within this file.
interrupt void epwm3_timer_isr(void);void InitEPwmTimer(void);void Gpio_select(void);// Global variables used in this exampleUint32 EPwm1TimerIntCount;Uint32 EPwm2TimerIntCount;Uint32 EPwm3TimerIntCount;Uint32 LoopCount;
// These are defined by the linker (see F2808.cmd)extern Uint16 RamfuncsLoadStart;extern Uint16 RamfuncsLoadEnd;extern Uint16 RamfuncsRunStart;
void main(void){
// Step 1. Initialize System Control:// PLL, WatchDog, enable Peripheral Clocks// This example function is found in the DSP280x_SysCtrl.c file.InitSysCtrl();
// Step 2. Initalize GPIO: // This example function is found in the DSP280x_Gpio.c file and// illustrates how to set the GPIO to it's default state.// InitGpio(); // Skipped for this example EALLOW;GpioCtrlRegs.GPAMUX1.all = 0x0; // GPIO pinGpioCtrlRegs.GPADIR.all = 0xFF; // Output pinGpioDataRegs.GPADAT.all =0xFF; // Close LEDsEDIS;
// For this example use the following configuration:Gpio_select();
// Step 3. Clear all interrupts and initialize PIE vector table:// Disable CPU interrupts DINT;
// Initialize the PIE control registers to their default state.// The default state is all PIE interrupts disabled and flags// are cleared. // This function is found in the DSP280x_PieCtrl.c file.InitPieCtrl();// Disable CPU interrupts and clear all CPU interrupt flags:IER = 0x0000;IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt // Service Routines (ISR). // This will populate the entire table, even if the interrupt// is not used in this example. This is useful for debug purposes.// The shell ISR routines are found in DSP280x_DefaultIsr.c.// This function is found in DSP280x_PieVect.c.InitPieVectTable();
// Interrupts that are used in this example are re-mapped to// ISR functions found within this file. EALLOW; // This is needed to write to EALLOW protected registers// PieVectTable.EPWM1_INT = &epwm1_timer_isr;// PieVectTable.EPWM2_INT = &epwm2_timer_isr;PieVectTable.EPWM3_INT = &epwm3_timer_isr;EDIS; // This is needed to disable write to EALLOW protected registers
// Step 4. Initialize all the Device Peripherals:// This function is found in DSP280x_InitPeripherals.c// InitPeripherals(); // Not required for this exampleInitEPwmTimer(); // For this example, only initialize the ePWM TimersMemCopy(&RamfuncsLoadStart, &RamfuncsLoadEnd, &RamfuncsRunStart);
// Call Flash Initialization to setup flash waitstates// This function must reside in RAMInitFlash();
// Initalize counters: EPwm1TimerIntCount = 0;EPwm2TimerIntCount = 0;EPwm3TimerIntCount = 0;LoopCount = 0;// Enable CPU INT3 which is connected to EPWM1-3 INT:IER |= M_INT3;
// Enable EPWM INTn in the PIE: Group 3 interrupt 1-3PieCtrlRegs.PIEIER3.bit.INTx3 = PWM3_INT_ENABLE;
// Enable global Interrupts and higher priority real-time debug events:EINT; // Enable Global interrupt INTMERTM; // Enable Global realtime interrupt DBGM
// Step 6. IDLE loop. Just sit and loop forever (optional):EALLOW;GpioCtrlRegs.GPBMUX1.bit.GPIO34 = 0;GpioCtrlRegs.GPBDIR.bit.GPIO34 = 1;EDIS;for(;;){// This loop will be interrupted, so the overall// delay between pin toggles will be longer. DELAY_US(DELAY);LoopCount++;GpioDataRegs.GPBTOGGLE.bit.GPIO34 = 1;}
}
void InitEPwmTimer(){
EALLOW;SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocksEDIS;
// Setup SyncEPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // Pass through// Allow each timer to be sync'edEPwm3Regs.TBCTL.bit.PHSEN = TB_ENABLE;EPwm3Regs.TBPHS.half.TBPHS = 300; EPwm3Regs.TBPRD = PWM3_TIMER_TBPRD;EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count upEPwm3Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // Enable INT on Zero eventEPwm3Regs.ETSEL.bit.INTEN = PWM3_INT_ENABLE; // Enable INTEPwm3Regs.ETPS.bit.INTPRD = ET_3RD; // Generate INT on 3rd event
EALLOW;SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1; // Start all the timers syncedEDIS;
}
interrupt void epwm3_timer_isr(void){Uint16 i;EPwm3TimerIntCount++;
// Short Delay to simulate some ISR Codefor(i = 1; i < 0x01FF; i++) {}GpioDataRegs.GPADAT.all=0xFFFDFFFF; //GPIO17=0 LED灯亮DELAY_US(DELAY1);GpioDataRegs.GPADAT.all=0xFFF7FFFF; //GPIO19=0 两个LED交替亮DELAY_US(DELAY1);// Clear INT flag for this timerEPwm3Regs.ETCLR.bit.INT = 1;
// Acknowledge this interrupt to receive more interrupts from group 3PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;}
void Gpio_select(void){
EALLOW;
GpioCtrlRegs.GPAPUD.bit.GPIO6 = 0; // Enable pullup on GPIO11GpioDataRegs.GPASET.bit.GPIO6 = 1; // Load output latchGpioCtrlRegs.GPAMUX1.bit.GPIO6 = 0; // GPIO11 = GPIOGpioCtrlRegs.GPADIR.bit.GPIO6 = 1; // GPIO11 = output
GpioCtrlRegs.GPAPUD.bit.GPIO16= 0; // Enable pullup on GPIO11GpioDataRegs.GPASET.bit.GPIO16 = 1; // Load output latchGpioCtrlRegs.GPAMUX2.bit.GPIO16 = 0; // GPIO11 = GPIOGpioCtrlRegs.GPADIR.bit.GPIO16 = 1; // GPIO11 = output
GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0; // Enable pullup on GPIO11GpioDataRegs.GPASET.bit.GPIO17 = 1; // Load output latchGpioCtrlRegs.GPAMUX2.bit.GPIO17 = 0; // GPIO11 = GPIOGpioCtrlRegs.GPADIR.bit.GPIO17 = 1; // GPIO11 = output
GpioCtrlRegs.GPAPUD.bit.GPIO19 = 0; // Enable pullup on GPIO11GpioDataRegs.GPASET.bit.GPIO19 = 1; // Load output latchGpioCtrlRegs.GPAMUX2.bit.GPIO19 = 0; // GPIO11 = GPIOGpioCtrlRegs.GPADIR.bit.GPIO19= 1; // GPIO11 = output
GpioCtrlRegs.GPAPUD.bit.GPIO8 = 0; // Enable pullup on GPIO11GpioDataRegs.GPASET.bit.GPIO8 = 1; // Load output latchGpioCtrlRegs.GPAMUX1.bit.GPIO8 = 0; // GPIO11 = GPIOGpioCtrlRegs.GPADIR.bit.GPIO8 = 1; // GPIO11 = output
GpioCtrlRegs.GPAMUX2.bit.GPIO31 = 0; // GPIO11 = GPIOGpioCtrlRegs.GPADIR.bit.GPIO31 = 0; // GPIO11 = output
EDIS;
}
在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。
图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。
user1439473:
回复 Eric Ma:
您好,我在使用F28035 sci boot 时碰到一些问题想咨询您: 我使用的sci是SCIA ,外面接的是485 芯片,不过这个芯片是自动使能端的,也就是说只要485a、485b两根线就可以使用,带仿真器调试过485口工作正常,拔掉仿真器将GPIO34和GPIO37设定为SCI启动,使用C2Prog1.5进行程序烧写时,提示错误“Connecting with target (autobaud)… failed (no response)!”,请帮我分析下,谢谢!
在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。
图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。
lai jiucai:
回复 user1439473:
你先不用C2Prog软件烧录。
用个低速波特率,9600,8bit,1stop,
设置成SCIboot以后,上电,用串口助手发字符“A”,看看有没有返回“A”
有说明通讯成功,应该是可以用C2Prog烧录
没有返回说明通讯无法建立起来
再检查一下你的自动使能的芯片对于a,b信号的要求,试试把DSP的串口TX上啦去掉?
在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。
图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。
sam cheung:
回复 Eric Ma:
您好 请教下 我的程序无法进入中断(Controlsuite里的led blink例程) 是否跟这个boot有关系呢
在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。
图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。
hsu frank:
回复 user1439473:
HI tongshu,
我也遇到了同样的问题,你解决了这个问题没?
怎么解决的? help
Regards
Fan
在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。
图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。
user3900194:
我想问下,我连上ccs3.3后,你上文所说“我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B”
我想问下,从哪个地址设置EMU_KEY 和EMU_BMODE 值啊,谢谢
在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。
图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。
user3900194:
回复 lai jiucai:
C2Prog请问下这个烧录软件从何处找到,谢谢





