大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC™ and InstaSPIN-MOTION™ User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
user78960159:
论坛手机端不支持插入图片吗 试了半天 也不行 没改版之前可以插入
大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC™ and InstaSPIN-MOTION™ User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
user78960159:
回复 user78960159:
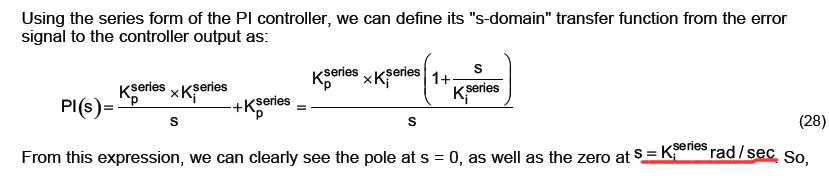
疑问1. 零点为什么不是-Ki呢,控制理论基础不好,麻烦大家知道的解释下?
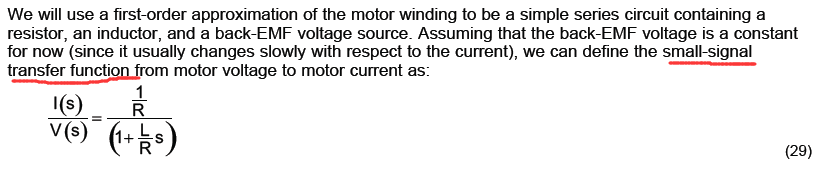
疑问2. 这个小信号传递函数的理论依据是什么呢?
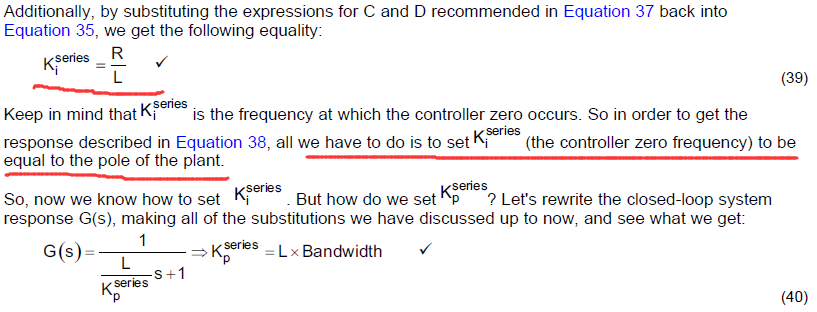
疑问3. 电机的绕组电感和绕组电阻是确定的,那么Ki就是确定的,将Ki设置为等于极点值是什么意思呢?选定电机以后ki应该就是固定的了吧,怎么还能进行设置改变其数值呢?
疑问4. Bandwith和G(s)是什么关系呢,理论基础不好,大家知道的指点一下
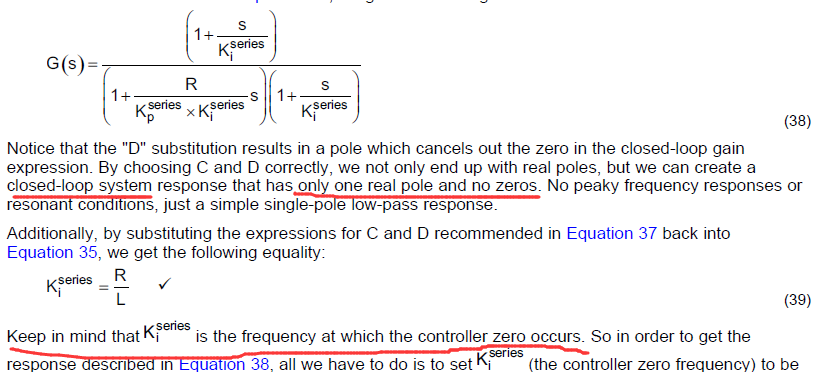
疑问5. 经过变换以后,系统只有一个极点,没有零点,而Ki是系统的零点。没有零点,但是Ki又是系统的零点,有和没有该怎么理解呢?
大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC™ and InstaSPIN-MOTION™ User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
user78960159:
回复 user78960159:
这是12.3.5.6章节的描述

399页有如下描述

疑问6. 我看不出12.3.5.6章节和等式51、52有什么关系
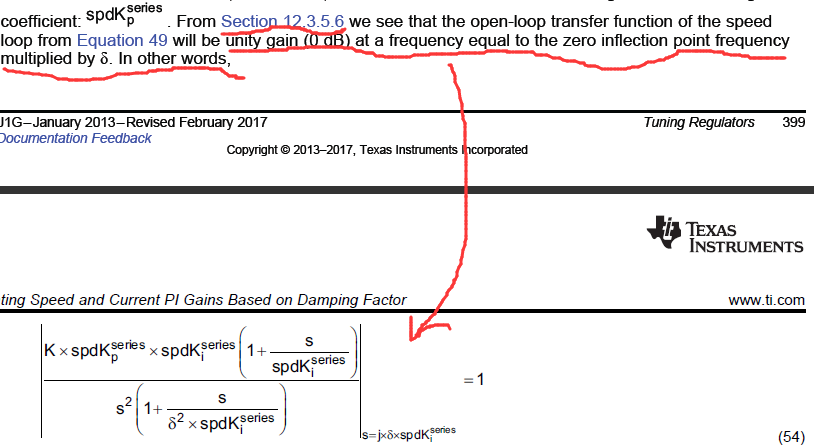
疑问7. 上面的这段描述同样提到了12.3.5.6章节,我同样看不出这个章节和这里的描述有什么关系
疑问8. 等式54是在什么条件下怎么得来的呢?为什么当“requency equal to the zero inflection point frequency multiplied by δ"时增益为0dB呢?
其他
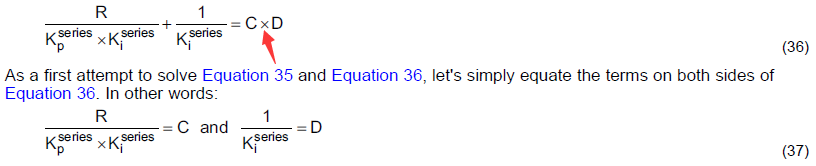
这里的乘号写错了,应该是加号,望再版时改正
大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC™ and InstaSPIN-MOTION™ User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
Igor An:
回复 user78960159:
问题1,
从描述看s = Ki_serie意思就是零点是Ki啊。这里标注的Ki_serie只的是用串联型的PI结构来推导的即 G(s) = Kp_serie(1+Ki_serie/s)
而不是传统意义上我们理解的,也叫并联型PI,即 G(s) = Kp + Ki/s
问题2~8,这些问题都是自动控制原理的内容,如果想把这些问题从理论基础层面讲清楚,是需要把自动控制原理的大概两到三章的内容全贴上来。所以这几个问题都太大了,实在是不太好几句话说明白,而且想完全彻底的搞明白,还是建议去找自动控制原理的教材,去理解带宽,零点,极点等。
这里用来计算KP,KI的方式是自动控制原理的零极点对消的办法,可以根据一些疑惑点去查找教材的知识点解释。
大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC™ and InstaSPIN-MOTION™ User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
user78960159:
回复 Igor An:
您好 感谢帮助
对于疑问1,零点应该是指使传递函数分子为零对吗,那么零点为什么不是 -Ki series (负的Ki series) 呢?
对于问题2,理论相关,我去查资料
对于问题3,可能是那段英文描述造成的歧义,从后文的距离计算参数看,电机参数R L确定以后,Ki series也就确定了
对于问题4,理论相关,我去查资料
对于问题5,理论相关,不理解,我去看资料
对于问题6,和理论没关系,12.3.5.6的那段引文描述和式51、51我认为没关系,是不是手册里写错了。12.3.5.6只不过是介绍了SpinTAC的优势。
对于问题7,和理论没关系,同问题6,看不是和相关章节的描述有什么关系
对于问题8,理论相关,我去看资料
大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC™ and InstaSPIN-MOTION™ User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
user78960159:
回复 user78960159:
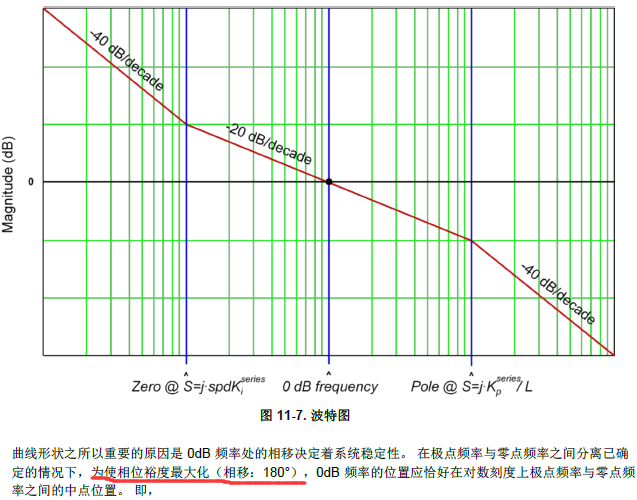
第一点. 从这里的描述看,相移180度是对系统好的是吗?
第二点. 从11.8看,阻尼系数越小,相移越接近180度,那么是阻尼系数越小越好吗?
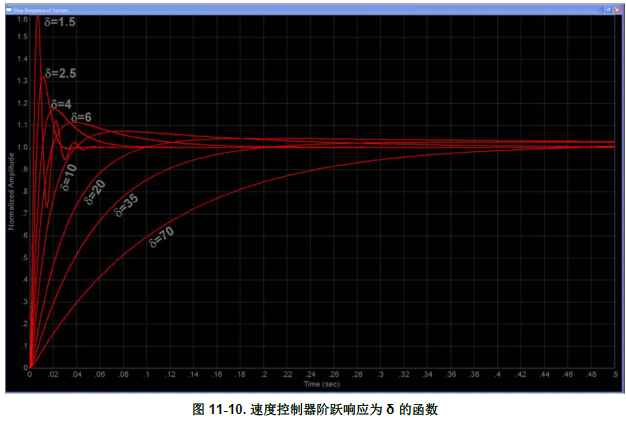
第三点. 阻尼系数越小,超调越大,因此阻尼系数不是越小越好
疑问9. 以上三点,看起来是矛盾吧?
第一点. 从这里的描述看,相移180度是对系统好的是吗?
第二点. 从11.8看,阻尼系数越小,相移越接近180度,那么是阻尼系数越小越好吗?
第三点. 阻尼系数越小,超调越大,因此阻尼系数不是越小越好
大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC™ and InstaSPIN-MOTION™ User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
user78960159:
回复 user78960159:
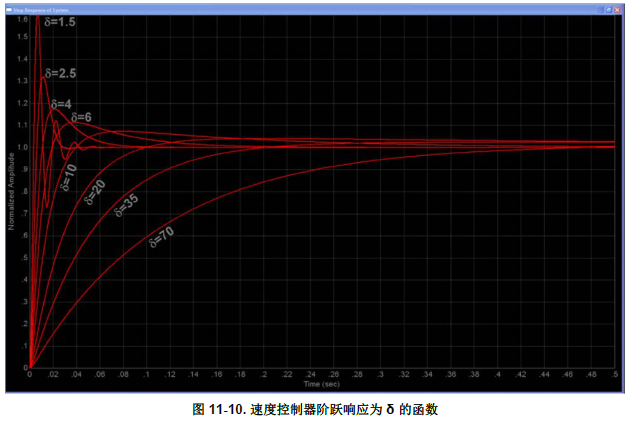

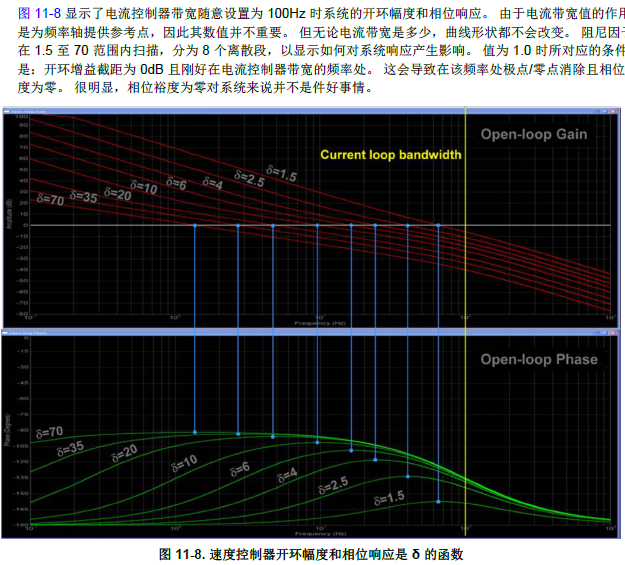
疑问10. 这段描述中写的“通常不接受远大于30的值,同样是因为过冲数量太大” 可是从图中看,大于30,早已没有了过冲,这句话是不是写错了,如果大于30也会有较大过冲,那么阻尼系数到底是应该设大还是设小,设小会有过冲,设大也会有过冲,,矛盾吗?
大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC™ and InstaSPIN-MOTION™ User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
user78960159:
回复 user78960159:
漏写了一个疑问
疑问11. “值为1.0 时所对应的条件是:开环增益截距为0dB 且刚好在电流控制器带宽的频率处”
这里的1.0,是指阻尼系数吗。如果1.0是个关键点,为什么不在11-9图中描绘出来呢?
在有为什么说刚好在电流控制器带宽的频率处呢?
是根据阻尼系数1.5的曲线估计出来的吗
大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC™ and InstaSPIN-MOTION™ User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
user78960159:
回复 user78960159:
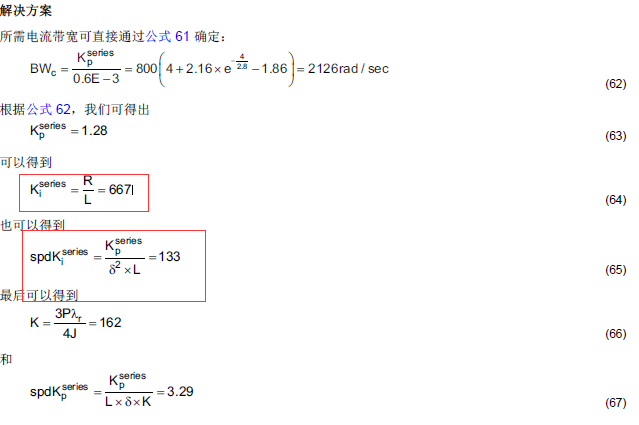
疑问12.举例里的积分系数都很大,几百,可是TI的例程如HVPM_Sensored等例程并没有这么大的积分系数,这是为什么呢?
大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC™ and InstaSPIN-MOTION™ User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
user78960159:
回复 user78960159:
那位朋友帮忙解答下帖子中的一些疑问 多谢





