在使用TMS320f28034这款芯片的单周期斩波功能,遇到了一些问题如下:
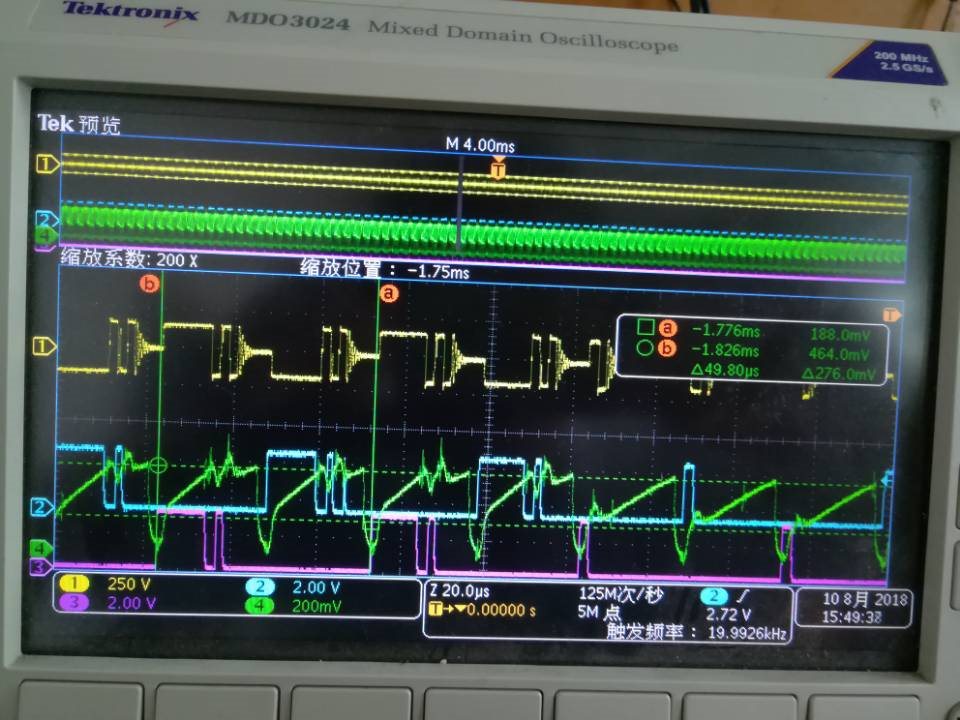
ePWM的频率设置为20kHZ;ePWM1,ePWM2,ePWM3同步;ePWM1A和ePWM2A驱动全桥,控制逆变电源(ePWM1B和ePWM2B不使用);ePWM3A和ePWM3B用来做斜波补偿,和电流反馈信号一起从Comp1的一个端口进入,Comp1的另一个端口为软件计算的值写入DACVAL,对ePWM1A,ePWM2A进行斩波。现在发现在一个ePWM周期内出现多次斩波的现象。见附件。
下图通道1为全桥驱动;通道2为ePWM1A(最大占空比设置为50%);通道3为ePWM2A(最大占空比设置为50%);通道4为ePWM3A(占空比设置为50%)和ePWM3B(占空比设置为50%)+反馈电流;a b之间为一个周期。
//###########################################################################
//
// FILE:DSP2803x_Comp.c
//
// TITLE:DSP2803x Comparator Initialization & Support Functions.
//
//###########################################################################
// $TI Release: F2803x C/C++ Header Files and Peripheral Examples V127 $
// $Release Date: March 30, 2013 $
//###########################################################################
#include "DSP2803x_Device.h"// DSP2803x Headerfile Include File
#include "DSP2803x_Examples.h"// DSP2803x Examples Include File
void InitCompDriver(void);
void InitCompGpio(void);
void InitComp(void);
void InitComp(void)
{
InitCompGpio();
InitCompDriver();
}
void InitCompGpio()
{InitComp1Gpio();
}
void InitComp1Gpio()
{EALLOW;GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1;// Disable pull-up for GPIO1 (CMP1OUT)GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 3;// Configure GPIO1 for CMP1OUT operationGpioCtrlRegs.AIOMUX1.bit.AIO2 = 2;// Configure AIO2 for CMP1A (analog input) operationSysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;//EDIS;
}
#if DSP28_COMP2
void InitComp2Gpio()
{EALLOW;GpioCtrlRegs.AIOMUX1.bit.AIO4 = 2;// Configure AIO4 for CMP2A (analog input) operationEDIS;
}
#endif //end DSP28_COMP2
#if DSP28_COMP3
void InitComp3Gpio()
{EALLOW;GpioCtrlRegs.AIOMUX1.bit.AIO6 = 2;// Configure AIO6 for CMP3A (analog input) operationEDIS;
}
#endif //end DSP28_COMP3
/**********************************************************************************/
//函数名:void IntiCompDriver(void);
//功能:比较器模块初始化
//备注:
/*********************************************************************************/
void InitCompDriver()
{EALLOW;SysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;// Enable clock to the Comparator 1 blockComp1Regs.DACVAL.bit.DACVAL = 300;//C_CTCurr_Pro;Comp1Regs.COMPCTL.bit.COMPDACEN = 1;// Power up Comparator 1 locallyComp1Regs.COMPCTL.bit.COMPSOURCE = 0;Comp1Regs.COMPCTL.bit.CMPINV = 0;Comp1Regs.COMPCTL.bit.QUALSEL = 6;Comp1Regs.COMPCTL.bit.SYNCSEL =1;EDIS;
}
//===========================================================================
// End of file.
//===========================================================================
-----------------------------------以上为DSP2803x_Comp.c----------------------------------------------------------------
//**************************************************************************
// Copyright(c)2017-DR_Welding
// 文件名称 : WPCM2315CU2_Isr.c
// 作者 :
// 模块功能 :系统中断
// 局部函数列表: 无
// 更改记录 :
// 日期 DR版本 作者 备注
//
//**************************************************************************
#define in_interrupt
#include "DSP2803x_Header.h"// Headerfile Include File
#include "WPPM3312M2_Isr.h"
#include "WPPM3312M2_SysReg.h"
#include "WPPM3312M2_SysMacro.h"
#include "WPPM3312M2_GlobalVarDef.h"
#include "WPPM3312M2_EepromDriver.h"
#include "WPPM3312M2_Can.h"
#include "WPPM3312M2_Struct.h"
//#include"WPPM3312M2_LedShow.h"
#include"WPPM3312M2_KeyDispose.h"
//============================
// 内部函数声明
//============================
void vPwm1IntIsr(void);
void vTimer0IntIsr(void);
void IsrVarInit(void);
//******************************************************************
// 函数名 :void InitInterrupt(void)
// 作者 :
// 功能 :中断模块初始化
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitInterrupt(void)
{EALLOW;
// 定义PWM1的中断向量PieVectTable.EPWM1_INT = &vPwm1IntIsr;PieCtrlRegs.PIEIER3.bit.INTx1 = 1;IER |= M_INT3;EDIS;
}
//******************************************************************
// 函数名 :void vPwm1IntIsr(void)
// 作者 :
// 功能 :主拓扑PWM中断
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
interrupt void vPwm1IntIsr(void)
{
//========= 更新主功率移相角=========mEnablePowerPwm();
mSetPwm1Duty(1500);
PidLogic();//PI处理
//======================== 清中断标志并再次使能中断 ===========================
EPwm1Regs.ETCLR.bit.INT = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
/****************************************************************************/
//函数名:void PidUpGrading(int PidResult);
// 作者 :MaKe
//功能:比较器模块更新PID计算结果
// 参数 :PidResult :PID计算结果
// 祷?:无
// 调用全局变量:无
// 修改全局变量:无
//备注:2018.06.29
/************************************************************************/
void PidUpGrading(int PidResult)
{EALLOW;Comp1Regs.DACVAL.bit.DACVAL = PidResult; //C_CTCurr_Pro;//原边过流保护点EDIS;
}
------------------------------以上为WPCM2315CU2_Isr.c------------------------------------------------------------------------------//**************************************************************************
// ***
// 文件名称 : DSP2803x_EPwm.c
// 作者 :
// 模块功能 :DSP2803x EPwm Initialization & Support Functions.
// 局部函数列表: 无
// 版本信息 : TI File $Revision: /main/3 $
// Checkin $Date: November 10, 200914:05:11 $
// $TI Release: 2803x C/C++ Header Files V1.21 $
// $Release Date: December 1, 2009 $
// 更改记录 :
//**************************************************************************
#include "DSP2803x_Header.h"// Headerfile Include File
#include "WPPM3312M2_SysMacro.h"
#include "WPPM3312M2_SysReg.h"
#include "DSP2803x_Device.h"
//============================
// 内部函数声明
//============================
void InitEPwmGpio(void);
void InitEPwm1Gpio(void);
void InitEPwm2Gpio(void);
void InitEPwm3Gpio(void);
void InitEPwm4Gpio(void);
void InitEPwm5Gpio(void);
void InitEPwm6Gpio(void);
void InitEPwm7Gpio(void);
void InitEPwmDriver(void);
void InitEPwm1Driver(void);
void InitEPwm2Driver(void);
void InitEPwm3Driver(void);
void InitEPwm4Driver(void);
void InitEPwm5Driver(void);
void InitEPwm6Driver(void);
void InitEPwm7Driver(void);
void InitTzGpio(void);
void InitTzDriver(void);
void InitDCEventDriver(void);
//******************************************************************
// 函数名 :void InitEPwm(void)
// 作者 :TI
// 功能 :初始化系统PWM模块及管脚设置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitEPwm(void)
{
// 配置管脚功能
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
InitEPwmGpio();
// InitTzGpio();
// 初始化寄存器
// InitTzDriver();
// InitDCEventDriver();
InitEPwmDriver();
//mUpDatePwm2Phase(0);
mUpDatePwm2Phase(1500);
//mSetPwm4BDuty(0);
mDisablePowerPwm();
mDisableMotorPWM();
mEnableMotorPWM();//////使能PWM3
// mDisableJRFPWM();
// mDisableFANPWM();
// mDebugPWM(1000);
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
}
//******************************************************************
// 函数名 :void InitEPwmDriver(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as EPwm pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//******************************************************************
void InitEPwmGpio(void)
{
#if DSP28_EPWM1InitEPwm1Gpio();
#endif // endif DSP28_EPWM1
#if DSP28_EPWM2InitEPwm2Gpio();
#endif // endif DSP28_EPWM2
#if DSP28_EPWM3InitEPwm3Gpio();
#endif // endif DSP28_EPWM3
#if DSP28_EPWM4// InitEPwm4Gpio();
#endif // endif DSP28_EPWM4
#if DSP28_EPWM5//InitEPwm5Gpio();
#endif // endif DSP28_EPWM5
#if DSP28_EPWM6//InitEPwm6Gpio();
#endif // endif DSP28_EPWM6
#if DSP28_EPWM7//InitEPwm7Gpio();
#endif // endif DSP28_EPWM7
}
//******************************************************************
// 函数名 :void InitEPwm1Gpio(void)
// 作者 :TI
// 功能 :初始化PWM1输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM1
void InitEPwm1Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO0 = 1;// Disable pull-up on GPIO0 (EPWM1A)
GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1;// Disable pull-up on GPIO1 (EPWM1B)
/* Configure EPWM-1 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM1 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 1;// Configure GPIO0 as EPWM1A
GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 1;// Configure GPIO1 as EPWM1B
EDIS;
}
#endif // endif DSP28_EPWM1
//******************************************************************
// 函数名 :void InitEPwm2Gpio(void)
// 作者 :TI
// 功能 :初始化PWM2输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM2
void InitEPwm2Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1;// Disable pull-up on GPIO2 (EPWM2A)
GpioCtrlRegs.GPAPUD.bit.GPIO3 = 1;// Disable pull-up on GPIO3 (EPWM2B)
/* Configure EPwm-2 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM2 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO2 = 1;// Configure GPIO2 as EPWM2A
GpioCtrlRegs.GPAMUX1.bit.GPIO3 = 1;// Configure GPIO3 as EPWM2B
EDIS;
}
//#endif // endif DSP28_EPWM2
//******************************************************************
// 函数名 :void InitEPwm3Gpio(void)
// 作者 :TI
// 功能 :初始化PWM3输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM3
void InitEPwm3Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.GpioCtrlRegs.GPAPUD.bit.GPIO4 = 1;// Disable pull-up on GPIO4 (EPWM3A)
GpioCtrlRegs.GPAPUD.bit.GPIO5 = 1;// Disable pull-up on GPIO5 (EPWM3B)
/* Configure EPwm-3 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM3 functional pins.
// Comment out other unwanted lines.GpioCtrlRegs.GPAMUX1.bit.GPIO4 = 1;// Configure GPIO4 as EPWM3A
GpioCtrlRegs.GPAMUX1.bit.GPIO5 = 1;// Configure GPIO5 as EPWM3B
EDIS;
}
//#endif // endif DSP28_EPWM3
//******************************************************************
// 函数名 :void InitEPwm4Gpio(void)
// 作者 :TI
// 功能 :初始化PWM4输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM4
void InitEPwm4Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1;// Disable pull-up on GPIO6 (EPWM4A)
GpioCtrlRegs.GPAPUD.bit.GPIO7 = 1;// Disable pull-up on GPIO7 (EPWM4B)
/* Configure EPWM-4 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM4 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 1;// Configure GPIO6 as EPWM4A
GpioCtrlRegs.GPAMUX1.bit.GPIO7 = 1;// Configure GPIO7 as EPWM4B
EDIS;
}
//#endif // endif DSP28_EPWM4
//******************************************************************
// 函数名 :void InitEPwm5Gpio(void)
// 作者 :
// 功能 :初始化PWM5输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :EPWM5模块只用到了GPIO9,故只初始化此管脚
//******************************************************************
//#if DSP28_EPWM5
void InitEPwm5Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO8 = 1;// Disable pull-up on GPIO8 (EPWM5A)
GpioCtrlRegs.GPAPUD.bit.GPIO9 = 1;// Disable pull-up on GPIO9 (EPWM5B)
/* Configure EPWM-5 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM5 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO8 = 1;// Configure GPIO8 as EPWM5A
GpioCtrlRegs.GPAMUX1.bit.GPIO9 = 1;// Configure GPIO9 as EPWM5B
EDIS;
}
//#endif // endif DSP28_EPWM5
//******************************************************************
// 函数名 :void InitEPwm6Gpio(void)
// 作者 :TI
// 功能 :初始化PWM6输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM6
void InitEPwm6Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO10 = 1;// Disable pull-up on GPIO10 (EPWM6A)//GpioCtrlRegs.GPAPUD.bit.GPIO11 = 1;// Disable pull-up on GPIO11 (EPWM6B)
/* Configure EPWM-6 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM6 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO10 = 1;// Configure GPIO10 as EPWM6A//GpioCtrlRegs.GPAMUX1.bit.GPIO11 = 1;// Configure GPIO11 as EPWM6B
EDIS;
}
//#endif // endif DSP28_EPWM6
//******************************************************************
// 函数名 :void InitEPwm7Gpio(void)
// 作者 :TI
// 功能 :初始化PWM7输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM7
void InitEPwm7Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.//GpioCtrlRegs.GPBPUD.bit.GPIO40 = 1;// Disable pull-up on GPIO40 (EPWM7A)
GpioCtrlRegs.GPBPUD.bit.GPIO41 = 1;// Disable pull-up on GPIO41 (EPWM7B)
/* Configure EPWM-7 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM7 functional pins.
// Comment out other unwanted lines.// GpioCtrlRegs.GPBMUX1.bit.GPIO40 = 1;// Configure GPIO40 as EPWM7A
GpioCtrlRegs.GPBMUX1.bit.GPIO41 = 1;// Configure GPIO41 as EPWM7B
EDIS;
}
//#endif // endif DSP28_EPWM7
//******************************************************************
// 函数名 :void InitEPwmSyncGpio(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as EPwm Synch pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitEPwmSyncGpio(void)
{
//EALLOW;
/* Configure EPWMSYNCI */
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO6 = 0;// Enable pull-up on GPIO6 (EPWMSYNCI)
GpioCtrlRegs.GPBPUD.bit.GPIO32 = 0;// Enable pull-up on GPIO32 (EPWMSYNCI)
/* Set qualification for selected pins to asynch only */
// This will select synch to SYSCLKOUT for the selected pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAQSEL1.bit.GPIO6 = 0;// Synch to SYSCLKOUT GPIO6 (EPWMSYNCI)
GpioCtrlRegs.GPBQSEL1.bit.GPIO32 = 0; // Synch to SYSCLKOUT GPIO32 (EPWMSYNCI)
/* Configure EPwmSync pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPwmSync functional pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 2;// Configures GPIO6 for EPWMSYNCI operation
GpioCtrlRegs.GPBMUX1.bit.GPIO32 = 2;// Configures GPIO32 for EPWMSYNCI operation.
/* Configure EPWMSYNC0 */
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1;// Disable pull-up on GPIO6 (EPWMSYNCO)
GpioCtrlRegs.GPBPUD.bit.GPIO33 = 1;// Disable pull-up on GPIO33 (EPWMSYNCO)
// GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 3;// Configures GPIO6 for EPWMSYNCO
GpioCtrlRegs.GPBMUX1.bit.GPIO33 = 2; // Configures GPIO33 for EPWMSYNCO
}
//******************************************************************
// 函数名 :void InitTzGpio(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as Trip Zone (TZ) pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//******************************************************************
void InitTzGpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO12 = 0;// Enable pull-up on GPIO12 (TZ1)
// GpioCtrlRegs.GPAPUD.bit.GPIO15 = 0;// Enable pull-up on GPIO15 (TZ1)
GpioCtrlRegs.GPAPUD.bit.GPIO13 = 0;// Enable pull-up on GPIO13 (TZ2)
// GpioCtrlRegs.GPAPUD.bit.GPIO16 = 0;// Enable pull-up on GPIO16 (TZ2)
// GpioCtrlRegs.GPAPUD.bit.GPIO28 = 0;// Enable pull-up on GPIO28 (TZ2)
GpioCtrlRegs.GPAPUD.bit.GPIO14 = 0;// Enable pull-up on GPIO14 (TZ3)
// GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0;// Enable pull-up on GPIO17 (TZ3)
// GpioCtrlRegs.GPAPUD.bit.GPIO29 = 0;// Enable pull-up on GPIO29 (TZ3)
/* Set qualification for selected pins to asynch only */
// Inputs are synchronized to SYSCLKOUT by default.
// This will select asynch (no qualification) for the selected pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAQSEL1.bit.GPIO12 = 3; // Asynch input GPIO12 (TZ1)
// GpioCtrlRegs.GPAQSEL1.bit.GPIO15 = 3; // Asynch input GPIO15 (TZ1)
GpioCtrlRegs.GPAQSEL1.bit.GPIO13 = 3; // Asynch input GPIO13 (TZ2)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO16 = 3; // Asynch input GPIO16 (TZ2)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO28 = 3; // Asynch input GPIO28 (TZ2)
GpioCtrlRegs.GPAQSEL1.bit.GPIO14 = 3; // Asynch input GPIO14 (TZ3)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO17 = 3; // Asynch input GPIO17 (TZ3)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO29 = 3; // Asynch input GPIO29 (TZ3)
/* Configure TZ pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be TZ functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO12 = 1; // Configure GPIO12 as TZ1
//GpioCtrlRegs.GPAMUX1.bit.GPIO15 = 1; // Configure GPIO15 as TZ1
GpioCtrlRegs.GPAMUX1.bit.GPIO13 = 1; // Configure GPIO13 as TZ2
// GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 3; // Configure GPIO16 as TZ2
// GpioCtrlRegs.GPAMUX2.bit.GPIO28 = 3; // Configure GPIO28 as TZ2
GpioCtrlRegs.GPAMUX1.bit.GPIO14 = 1; // Configure GPIO14 as TZ3
// GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 3; // Configure GPIO17 as TZ3
// GpioCtrlRegs.GPAMUX2.bit.GPIO29 = 3; // Configure GPIO29 as TZ3
EDIS;
}
//******************************************************************
// 函数名 :void InitEPwmDriver(void)
// 作者 篢I
// 功能 :初始低砅WM模块寄存髋渲?
// 参数 :无
// :无
// 调用全局变量?
//
// 备注
//******************************************************************
void InitEPwmDriver(void)
{
//#if DSP28_EPWM1InitEPwm1Driver();
//#endif
//#if DSP28_EPWM2
InitEPwm2Driver();
//#endif
//#if DSP28_EPWM3
InitEPwm3Driver();
//#endif
//#if DSP28_EPWM4
//InitEPwm4Driver();
//#endif
//#if DSP28_EPWM5
//InitEPwm5Driver();
//#endif
//#if DSP28_EPWM6
// InitEPwm6Driver();
//#endif
#if DSP28_EPWM7
// InitEPwm7Driver();
#endif
}
//******************************************************************
// 函数名 :void InitEPwm1Driver(void)
// 作者 :TI
// 功 :初始化系统ePWM1寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM1
void InitEPwm1Driver(void)
{
EALLOW;
EPwm1Regs.TBPRD = 3000;////PFSB_PERIOD,1250-48K
//EPwm1Regs.TBPRD = 1500;////PFSB_PERIOD,1250-48K
EPwm1Regs.TBPHS.all = 0;
EPwm1Regs.TBCTR = 0;
// Setup TBCLK
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
//EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW; //
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;//Count equal to zero; have a syn output
EPwm1Regs.TBCTL.bit.SWFSYNC = 0;
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; //
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm1Regs.TBCTL.bit.PHSDIR = 1;
EPwm1Regs.TBCTL.bit.FREE_SOFT = 3; //
// Setup compare
EPwm1Regs.CMPA.half.CMPA= 1500;
EPwm1Regs.CMPB = 1500;
EPwm1Regs.TBPHS.half.TBPHS = 0;
// Setup CMPCTL
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET;/////
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.ZRO = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CBU = AQ_SET;
//EPwm1Regs.AQSFRC.bit.RLDCSF = 0;
//Set DeadBand
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;//
EPwm1Regs.DBCTL.bit.IN_MODE = 0x0;
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm1Regs.DBFED = 200;//
//EPwm1Regs.DBRED = 200;//
EPwm1Regs.DBFED = 300;//
EPwm1Regs.DBRED = 300;//
//EPwm1Regs.DBCTL.bit.HALFCYCLE = 1;
// // Set ETSEL
EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // 2:0EPWMxINTn Select
EPwm1Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm1Regs.ETSEL.bit.SOCASEL = ET_CTRU_CMPA; // 10:8Start of conversion A Select
EPwm1Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm1Regs.ETSEL.bit.SOCBSEL = ET_CTRU_CMPB; // 14:12 Start of conversion B Select
EPwm1Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm1Regs.ETPS.bit.INTPRD = ET_1ST; // 1:0EPWMxINTn Period Select
EPwm1Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm1Regs.ETPS.bit.SOCAPRD = ET_1ST; // 9:8EPWMxSOCA Period Select
EPwm1Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm1Regs.ETPS.bit.SOCBPRD = 1; // 13:12 EPWMxSOCB Period Select
EPwm1Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
///////////////////////////////////////////////////////EPwm1Regs.TZSEL.bit.DCAEVT2 = 1;//////EPwm1Regs.TZSEL.bit.DCAEVT2 = 0;//////EPwm1Regs.TZSEL.bit.DCBEVT2 = 0;//////EPwm1Regs.TZSEL.bit.DCBEVT2 = 1;EPwm1Regs.TZSEL.bit.CBC1=1;
// What do we want the TZ1 and TZ2 to doEPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO;EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO;//EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCBH_LOW; //TZ_DCAH_HI;//EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_LOW;EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI;EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_HI;EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 2 output
EDIS;
}
#endif
//******************************************************************
// 函数名 :void InitEPwm2Driver(void)
// 作者 :TI
// 功能 初始化系统ePWM2寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM2
void InitEPwm2Driver(void)
{ EALLOW;
//SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
//EPwm2Regs.TBPRD = 1874;///48k
EPwm2Regs.TBPRD = 3000;///20k// Count up
//EPwm2Regs.TBPRD = 1500;///20k//Count updown
EPwm2Regs.TBPHS.all = 0;
EPwm2Regs.TBCTR = 0;
// Setup TBCLK
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
//EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;//Count updown
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Enable phase loading
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm2Regs.TBCTL.bit.SWFSYNC = 0;
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.PHSDIR = 1;
EPwm2Regs.TBCTL.bit.FREE_SOFT = 3; //
// Setup compare
EPwm2Regs.CMPA.half.CMPA= 1500;//
EPwm2Regs.CMPB= 1500;//
EPwm2Regs.TBPHS.half.TBPHS = 0;
// Setup CMPCTL
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm2Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.ZRO = AQ_CLEAR ;
EPwm2Regs.AQCTLB.bit.CBU = AQ_SET;
// EPwm2Regs.AQSFRC.bit.RLDCSF = 3;
//Set DeadBand
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;
EPwm2Regs.DBCTL.bit.IN_MODE = 0x0;
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm2Regs.DBFED = 200 ;//
//EPwm2Regs.DBRED = 200;
EPwm2Regs.DBFED = 300;//
EPwm2Regs.DBRED = 300;
////斩波比较模块
//EPwm2Regs.TZSEL.bit.DCAEVT2 = 1;
//EPwm2Regs.TZSEL.bit.DCAEVT2 = 0;
//EPwm2Regs.TZSEL.bit.DCBEVT2 = 0;
//EPwm2Regs.TZSEL.bit.DCBEVT2 = 1;
EPwm2Regs.TZSEL.bit.CBC1=1;// What do we want the TZ1 and TZ2 to do?EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;//EPwm2Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCBH_LOW;//EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;EPwm2Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI;EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_HI;EPwm2Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT; // DCAH = Comparator 2 outputEPwm2Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (not filtered)EPwm2Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async pathEPwm2Regs.TZEINT.bit.DCBEVT2=0;//??
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
#endif
//******************************************************************
// 函数名 :void InitEPwm3Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM3寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM3
void InitEPwm3Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
//EPwm3Regs.TBPRD = Motor_PERIOD;
EPwm3Regs.TBPRD = 3000;//1500;//C_MOTOR_PWM_PRD;
EPwm3Regs.TBPHS.all = 0;
EPwm3Regs.TBCTR = 0;
EPwm3Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
//EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // 对称波形输出
EPwm3Regs.TBCTL.bit.PHSEN = TB_DISABLE;// Disable phase loading
EPwm3Regs.TBCTL.bit.PRDLD = TB_SHADOW;
//EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // Count equal to zero; have a syn output
EPwm3Regs.TBCTL.bit.SWFSYNC = 0;
//EPwm3Regs.TBCTL.bit.HSPCLKDIV = 0x04;///1/8
EPwm3Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
// EPwm3Regs.TBCTL.bit.CLKDIV = 0x04;///1/16
EPwm3Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm3Regs.TBCTL.bit.PHSDIR = 1;
EPwm3Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compareEPwm3Regs.CMPA.half.CMPA =1500;
EPwm3Regs.CMPB = 0;
// Setup CMPCTL
EPwm3Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm3Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm3Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm3Regs.AQCTLA.bit.CAU = AQ_CLEAR; //
EPwm3Regs.AQCTLA.bit.PRD = AQ_SET; //
EPwm3Regs.AQCTLB.bit.CBU = AQ_SET; //
EPwm3Regs.AQCTLB.bit.PRD = AQ_CLEAR; //
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTR_PRD; // 2:0EPWMxINTn Select
EPwm3Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
/////////////////////////////////////////////////////
//死区模块(DB)配置
EPwm3Regs.DBCTL.bit.OUT_MODE =DB_FULL_ENABLE;
EPwm3Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
EPwm3Regs.DBCTL.bit.IN_MODE = 0;
//EPwm3Regs.DBCTL.bit.HALFCYCLE = 0;
EPwm3Regs.DBFED = 200;//Falling delay
EPwm3Regs.DBRED = 200; //Raising delay //0.01667*300=5U
// 事件触发模块(EZ)配置
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPA; // 2:0EPWMxINTn Select
EPwm3Regs.ETSEL.bit.INTEN = ET_DISABLE; // 3EPWMxINTn Enable
EPwm3Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // 10:8Start of conversion A Select
EPwm3Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm3Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm3Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm3Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm3Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm3Regs.ETPS.bit.SOCAPRD = 1; // 9:8EPWMxSOCA Period Select
EPwm3Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm3Regs.ETPS.bit.SOCBPRD = 1; // 13:12 EPWMxSOCB Period Select
EPwm3Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm4Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM4寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 送丝机H桥驱动
//******************************************************************
//#if DSP28_EPWM4
void InitEPwm4Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm4Regs.TBPRD = 1000;
EPwm4Regs.TBPHS.all = 0;
EPwm4Regs.TBCTR = 0;
EPwm4Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm4Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up and down
EPwm4Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm4Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm4Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;
EPwm4Regs.TBCTL.bit.SWFSYNC = 0;
EPwm4Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.PHSDIR = 1;
EPwm4Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm4Regs.CMPA.half.CMPA = Motor_PERIOD - 5;
EPwm4Regs.CMPB = 5;
// Setup CMPCTL
EPwm4Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm4Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm4Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm4Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm4Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM4A
EPwm4Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm4Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM4B
EPwm4Regs.AQCTLB.bit.CBD = AQ_SET;
// EPwm4Regs.AQSFRC.bit.RLDCSF = 3;
// Set deadband
// EPwm4Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;// Dead-band Output Mode Control
// EPwm4Regs.DBCTL.bit.POLSEL= DB_ACTV_HI;// Polarity Select Control
// EPwm4Regs.DBCTL.bit.IN_MODE = DBB_ALL;// Dead Band Input Mode Control
// EPwm4Regs.DBFED = 100;//Falling delay
// EPwm4Regs.DBRED = 100;//Raising delay
// Set ETSEL
EPwm4Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm4Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm4Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // 10:8Start of conversion A Select
EPwm4Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm4Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm4Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm4Regs.ETPS.bit.INTPRD = ET_1ST; // 1:0EPWMxINTn Period Select
EPwm4Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm4Regs.ETPS.bit.SOCAPRD = ET_1ST; // 9:8EPWMxSOCA Period Select
EPwm4Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm4Regs.ETPS.bit.SOCBPRD = ET_1ST; // 13:12 EPWMxSOCB Period Select
EPwm4Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm5Driver(void)
// 作者 :何志军
// 功能 :初始化系统ePWM5寄存髋渲?
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 送丝机H桥驱动
//******************************************************************
//#if DSP28_EPWM5
void InitEPwm5Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm5Regs.TBPRD = 1000;
EPwm5Regs.TBPHS.all = 0;
EPwm5Regs.TBCTR = 0;
// Setup TBCLK
EPwm5Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm5Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Disable phase loading
EPwm5Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm5Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm5Regs.TBCTL.bit.SWFSYNC = 0;
EPwm5Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.PHSDIR = 1;
EPwm5Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm5Regs.CMPA.half.CMPA = Motor_PERIOD - 5;
EPwm5Regs.CMPB = 5;
// Setup CMPCTL
EPwm5Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm5Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm5Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm5Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm5Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM6A
EPwm5Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm5Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM6B
EPwm5Regs.AQCTLB.bit.CBD = AQ_SET;
// set deadband
// EPwm5Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;// Dead-band Output Mode Control
// EPwm5Regs.DBCTL.bit.POLSEL= DB_ACTV_HI;// Polarity Select Control
// EPwm5Regs.DBCTL.bit.IN_MODE = DBB_ALL;// Dead Band Input Mode Control
// EPwm5Regs.DBFED = 100;//Falling delay
// EPwm5Regs.DBRED = 100;//Raising delay
EPwm5Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm5Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm5Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO;// 10:8Start of conversion A Select
EPwm5Regs.ETSEL.bit.SOCAEN = ET_DISABLE; // 11Start of conversion A Enable
EPwm5Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm5Regs.ETSEL.bit.SOCBEN = ET_DISABLE; // 15Start of conversion B Enable
EPwm5Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm5Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm5Regs.ETPS.bit.SOCAPRD = 0; // 9:8EPWMxSOCA Period Select
EPwm5Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm5Regs.ETPS.bit.SOCBPRD = 0; // 13:12 EPWMxSOCB Period Select
EPwm5Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm6Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM6寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 加热阀控制
//******************************************************************
//#if DSP28_EPWM6//
void InitEPwm6Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm6Regs.TBPRD = 1500;
EPwm6Regs.TBPHS.all = 0;
EPwm6Regs.TBCTR = 0;
EPwm6Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm6Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm6Regs.TBCTL.bit.PHSEN = TB_DISABLE;// Disable phase loading
EPwm6Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm6Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm6Regs.TBCTL.bit.SWFSYNC = 0;
EPwm6Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm6Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm6Regs.TBCTL.bit.PHSDIR = 1;
EPwm6Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm6Regs.CMPA.half.CMPA = 3;
// Setup CMPCTL
EPwm6Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm6Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm6Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm6Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm6Regs.AQCTLA.bit.CAU = AQ_CLEAR; // Set PWM6A
EPwm6Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm6Regs.ETSEL.bit.INTSEL = ET_CTR_PRD; // 2:0EPWMxINTn Select
EPwm6Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm6Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm6Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm6Regs.AQCSFRC.bit.CSFA = 0;
EPwm6Regs.AQCSFRC.bit.CSFB = 0;// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm7Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM7寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改绷浚何?
// 备注 : Slope Compensation PWM Control (Hardware
//******************************************************************
//#if DSP28_EPWM7
void InitEPwm7Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm7Regs.TBPRD = 1000;//3130--10K
EPwm7Regs.TBPHS.all = 0;
EPwm7Regs.TBCTR = 0;
EPwm7Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm7Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm7Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm7Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm7Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm7Regs.TBCTL.bit.SWFSYNC = 0;
EPwm7Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm7Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm7Regs.TBCTL.bit.PHSDIR = 1;
EPwm7Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm7Regs.CMPB = 0;
// Setup CMPCTL
EPwm7Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm7Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm7Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm7Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
// EPwm7Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM7B
// EPwm7Regs.AQCTLB.bit.CBD = AQ_SET;
EPwm7Regs.AQCTLB.bit.ZRO = AQ_SET;
EPwm7Regs.AQCTLB.bit.CBU = AQ_CLEAR;
EPwm7Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm7Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm7Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm7Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
/******************************************************************/
//函数名:void InitTzDriver(void)
//功能:Initialize the TZ Module for epwm1,epwm2,epwm4,epwm5 and epwm6 of WPPM3312Z
//备注:2015.06.25
//===========================================================================
void InitTzDriver(void)
{// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm1 Module
EALLOW;
EPwm1Regs.TZSEL.bit.CBC1 = 1;
//EPwm1Regs.TZSEL.bit.OSHT1 = 1;
//EPwm1Regs.TZSEL.bit.DCBEVT1 = 1;
EPwm1Regs.TZSEL.bit.DCAEVT1 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
EPwm1Regs.TZCTL.bit.DCAEVT1 = 2;
// EPwm1Regs.TZCTL.bit.DCBEVT1= 2;
// EPwm1Regs.TZDCSEL.bit.DCBEVT1 = TZ_DCBH_LOW;
EPwm1Regs.TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI;
// Enable TZ interrupt
// EPwm1Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1\TZ2 and TZ3 as one shot trip sources on EPwm2 Module
// EALLOW;
EPwm2Regs.TZSEL.bit.CBC1 = 1;
//EPwm2Regs.TZSEL.bit.OSHT1 = 1;
// EPwm2Regs.TZSEL.bit.DCBEVT1= 1;
EPwm2Regs.TZSEL.bit.DCAEVT1= 1;
// What do we want the TZ1 and TZ2 to do?
EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.DCAEVT1 = 2;
// EPwm2Regs.TZCTL.bit.DCBEVT1 = 2;
// EPwm2Regs.TZDCSEL.bit.DCBEVT1 = TZ_DCBH_LOW;
EPwm2Regs.TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI;
// Enable TZ interrupt
// EPwm2Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm4 Module
EPwm3Regs.TZSEL.bit.CBC3 = 1;//FAN
EPwm3Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EALLOW;
// EPwm4Regs.TZSEL.bit.CBC1 = 1;
EPwm4Regs.TZSEL.bit.DCAEVT2 = 1;
// EPwm4Regs.TZSEL.bit.DCBEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm4Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm4Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm4Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm4Regs.TZCTL.bit.DCBEVT2 = 2;
// EPwm4Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;
EPwm4Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// Enable TZ interrupt
// EPwm4Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm5 Module
// EALLOW;
// EPwm5Regs.TZSEL.bit.CBC1 = 1;
// EPwm5Regs.TZSEL.bit.CBC2 = 1;
//EPwm5Regs.TZSEL.bit.CBC3 = 1;//FAN
EPwm5Regs.TZSEL.bit.DCAEVT2 = 1;
// EPwm5Regs.TZSEL.bit.DCAEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm5Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm5Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm5Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm5Regs.TZCTL.bit.DCBEVT2 = 2;
EPwm5Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// EPwm5Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// Enable TZ interrupt
// EPwm5Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1\TZ2 and TZ3 as one shot trip sources on EPwm3 Module
// EALLOW;
// EPwm6Regs.TZSEL.bit.CBC1 = 1;
EPwm6Regs.TZSEL.bit.CBC2 = 1;///JRF
// EPwm6Regs.TZSEL.bit.CBC3 = 1;
// EPwm6Regs.TZSEL.bit.DCAEVT2= 1;
// EPwm6Regs.TZSEL.bit.DCBEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm6Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
// EPwm6Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm6Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm6Regs.TZCTL.bit.DCBEVT2 = 2;
// EPwm6Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;
// EPwm6Regs.TZDCSEL.bit.DCAEVT2= TZ_DCAH_HI;
// EPwm7Regs.TZSEL.bit.CBC2 = 1;//JRF
// EPwm7Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
// Enable TZ interrupt
// EPwm6Regs.TZEINT.bit.OST = 1;
EDIS;
}
/***********************************************************/
//函数名:void InitDCEventDriver
//功能:Initialize Digtal Compare Event Module
//备注:DC Event for protecting Power and Motor
//===========================================================================
void InitDCEventDriver(void)
{
// Define an event (DCAEVT1) based on TZ1 and TZ2
EALLOW;
EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 1 output and TZ1 input
// EPwm1Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_TZ1 ;
EPwm1Regs.DCACTL.bit.EVT1SRCSEL = DC_EVT1;// DCAEVT1 = DCAEVT1(not filtered)
EPwm1Regs.DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC;
EPwm2Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 1 output AND TZ1 input
// EPwm2Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_TZ1;
EPwm2Regs.DCACTL.bit.EVT1SRCSEL = DC_EVT1;// DCAEVT1 = DCAEVT1 (not filtered)
EPwm2Regs.DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC;
EPwm4Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT;// DCAH = Comparator 2 output
EPwm4Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (not filtered)
EPwm4Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async path
EPwm5Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT;// DCAH = Comparator 2 output
EPwm5Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2= DCAEVT2 (not filtered)
EPwm5Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async path
EDIS;
}
//===========================================================================
// End of file.
//===========================================================================
----------------------以上为DSP2803x_EPwm.c-----------------------------------------------------------
Jordan Zhou:能抓取到DACVAL的实时值吗?
在使用TMS320f28034这款芯片的单周期斩波功能,遇到了一些问题如下:
ePWM的频率设置为20kHZ;ePWM1,ePWM2,ePWM3同步;ePWM1A和ePWM2A驱动全桥,控制逆变电源(ePWM1B和ePWM2B不使用);ePWM3A和ePWM3B用来做斜波补偿,和电流反馈信号一起从Comp1的一个端口进入,Comp1的另一个端口为软件计算的值写入DACVAL,对ePWM1A,ePWM2A进行斩波。现在发现在一个ePWM周期内出现多次斩波的现象。见附件。
下图通道1为全桥驱动;通道2为ePWM1A(最大占空比设置为50%);通道3为ePWM2A(最大占空比设置为50%);通道4为ePWM3A(占空比设置为50%)和ePWM3B(占空比设置为50%)+反馈电流;a b之间为一个周期。
//###########################################################################
//
// FILE:DSP2803x_Comp.c
//
// TITLE:DSP2803x Comparator Initialization & Support Functions.
//
//###########################################################################
// $TI Release: F2803x C/C++ Header Files and Peripheral Examples V127 $
// $Release Date: March 30, 2013 $
//###########################################################################
#include "DSP2803x_Device.h"// DSP2803x Headerfile Include File
#include "DSP2803x_Examples.h"// DSP2803x Examples Include File
void InitCompDriver(void);
void InitCompGpio(void);
void InitComp(void);
void InitComp(void)
{
InitCompGpio();
InitCompDriver();
}
void InitCompGpio()
{InitComp1Gpio();
}
void InitComp1Gpio()
{EALLOW;GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1;// Disable pull-up for GPIO1 (CMP1OUT)GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 3;// Configure GPIO1 for CMP1OUT operationGpioCtrlRegs.AIOMUX1.bit.AIO2 = 2;// Configure AIO2 for CMP1A (analog input) operationSysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;//EDIS;
}
#if DSP28_COMP2
void InitComp2Gpio()
{EALLOW;GpioCtrlRegs.AIOMUX1.bit.AIO4 = 2;// Configure AIO4 for CMP2A (analog input) operationEDIS;
}
#endif //end DSP28_COMP2
#if DSP28_COMP3
void InitComp3Gpio()
{EALLOW;GpioCtrlRegs.AIOMUX1.bit.AIO6 = 2;// Configure AIO6 for CMP3A (analog input) operationEDIS;
}
#endif //end DSP28_COMP3
/**********************************************************************************/
//函数名:void IntiCompDriver(void);
//功能:比较器模块初始化
//备注:
/*********************************************************************************/
void InitCompDriver()
{EALLOW;SysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;// Enable clock to the Comparator 1 blockComp1Regs.DACVAL.bit.DACVAL = 300;//C_CTCurr_Pro;Comp1Regs.COMPCTL.bit.COMPDACEN = 1;// Power up Comparator 1 locallyComp1Regs.COMPCTL.bit.COMPSOURCE = 0;Comp1Regs.COMPCTL.bit.CMPINV = 0;Comp1Regs.COMPCTL.bit.QUALSEL = 6;Comp1Regs.COMPCTL.bit.SYNCSEL =1;EDIS;
}
//===========================================================================
// End of file.
//===========================================================================
-----------------------------------以上为DSP2803x_Comp.c----------------------------------------------------------------
//**************************************************************************
// Copyright(c)2017-DR_Welding
// 文件名称 : WPCM2315CU2_Isr.c
// 作者 :
// 模块功能 :系统中断
// 局部函数列表: 无
// 更改记录 :
// 日期 DR版本 作者 备注
//
//**************************************************************************
#define in_interrupt
#include "DSP2803x_Header.h"// Headerfile Include File
#include "WPPM3312M2_Isr.h"
#include "WPPM3312M2_SysReg.h"
#include "WPPM3312M2_SysMacro.h"
#include "WPPM3312M2_GlobalVarDef.h"
#include "WPPM3312M2_EepromDriver.h"
#include "WPPM3312M2_Can.h"
#include "WPPM3312M2_Struct.h"
//#include"WPPM3312M2_LedShow.h"
#include"WPPM3312M2_KeyDispose.h"
//============================
// 内部函数声明
//============================
void vPwm1IntIsr(void);
void vTimer0IntIsr(void);
void IsrVarInit(void);
//******************************************************************
// 函数名 :void InitInterrupt(void)
// 作者 :
// 功能 :中断模块初始化
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitInterrupt(void)
{EALLOW;
// 定义PWM1的中断向量PieVectTable.EPWM1_INT = &vPwm1IntIsr;PieCtrlRegs.PIEIER3.bit.INTx1 = 1;IER |= M_INT3;EDIS;
}
//******************************************************************
// 函数名 :void vPwm1IntIsr(void)
// 作者 :
// 功能 :主拓扑PWM中断
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
interrupt void vPwm1IntIsr(void)
{
//========= 更新主功率移相角=========mEnablePowerPwm();
mSetPwm1Duty(1500);
PidLogic();//PI处理
//======================== 清中断标志并再次使能中断 ===========================
EPwm1Regs.ETCLR.bit.INT = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
/****************************************************************************/
//函数名:void PidUpGrading(int PidResult);
// 作者 :MaKe
//功能:比较器模块更新PID计算结果
// 参数 :PidResult :PID计算结果
// 祷?:无
// 调用全局变量:无
// 修改全局变量:无
//备注:2018.06.29
/************************************************************************/
void PidUpGrading(int PidResult)
{EALLOW;Comp1Regs.DACVAL.bit.DACVAL = PidResult; //C_CTCurr_Pro;//原边过流保护点EDIS;
}
------------------------------以上为WPCM2315CU2_Isr.c------------------------------------------------------------------------------//**************************************************************************
// ***
// 文件名称 : DSP2803x_EPwm.c
// 作者 :
// 模块功能 :DSP2803x EPwm Initialization & Support Functions.
// 局部函数列表: 无
// 版本信息 : TI File $Revision: /main/3 $
// Checkin $Date: November 10, 200914:05:11 $
// $TI Release: 2803x C/C++ Header Files V1.21 $
// $Release Date: December 1, 2009 $
// 更改记录 :
//**************************************************************************
#include "DSP2803x_Header.h"// Headerfile Include File
#include "WPPM3312M2_SysMacro.h"
#include "WPPM3312M2_SysReg.h"
#include "DSP2803x_Device.h"
//============================
// 内部函数声明
//============================
void InitEPwmGpio(void);
void InitEPwm1Gpio(void);
void InitEPwm2Gpio(void);
void InitEPwm3Gpio(void);
void InitEPwm4Gpio(void);
void InitEPwm5Gpio(void);
void InitEPwm6Gpio(void);
void InitEPwm7Gpio(void);
void InitEPwmDriver(void);
void InitEPwm1Driver(void);
void InitEPwm2Driver(void);
void InitEPwm3Driver(void);
void InitEPwm4Driver(void);
void InitEPwm5Driver(void);
void InitEPwm6Driver(void);
void InitEPwm7Driver(void);
void InitTzGpio(void);
void InitTzDriver(void);
void InitDCEventDriver(void);
//******************************************************************
// 函数名 :void InitEPwm(void)
// 作者 :TI
// 功能 :初始化系统PWM模块及管脚设置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitEPwm(void)
{
// 配置管脚功能
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
InitEPwmGpio();
// InitTzGpio();
// 初始化寄存器
// InitTzDriver();
// InitDCEventDriver();
InitEPwmDriver();
//mUpDatePwm2Phase(0);
mUpDatePwm2Phase(1500);
//mSetPwm4BDuty(0);
mDisablePowerPwm();
mDisableMotorPWM();
mEnableMotorPWM();//////使能PWM3
// mDisableJRFPWM();
// mDisableFANPWM();
// mDebugPWM(1000);
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
}
//******************************************************************
// 函数名 :void InitEPwmDriver(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as EPwm pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//******************************************************************
void InitEPwmGpio(void)
{
#if DSP28_EPWM1InitEPwm1Gpio();
#endif // endif DSP28_EPWM1
#if DSP28_EPWM2InitEPwm2Gpio();
#endif // endif DSP28_EPWM2
#if DSP28_EPWM3InitEPwm3Gpio();
#endif // endif DSP28_EPWM3
#if DSP28_EPWM4// InitEPwm4Gpio();
#endif // endif DSP28_EPWM4
#if DSP28_EPWM5//InitEPwm5Gpio();
#endif // endif DSP28_EPWM5
#if DSP28_EPWM6//InitEPwm6Gpio();
#endif // endif DSP28_EPWM6
#if DSP28_EPWM7//InitEPwm7Gpio();
#endif // endif DSP28_EPWM7
}
//******************************************************************
// 函数名 :void InitEPwm1Gpio(void)
// 作者 :TI
// 功能 :初始化PWM1输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM1
void InitEPwm1Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO0 = 1;// Disable pull-up on GPIO0 (EPWM1A)
GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1;// Disable pull-up on GPIO1 (EPWM1B)
/* Configure EPWM-1 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM1 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 1;// Configure GPIO0 as EPWM1A
GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 1;// Configure GPIO1 as EPWM1B
EDIS;
}
#endif // endif DSP28_EPWM1
//******************************************************************
// 函数名 :void InitEPwm2Gpio(void)
// 作者 :TI
// 功能 :初始化PWM2输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM2
void InitEPwm2Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1;// Disable pull-up on GPIO2 (EPWM2A)
GpioCtrlRegs.GPAPUD.bit.GPIO3 = 1;// Disable pull-up on GPIO3 (EPWM2B)
/* Configure EPwm-2 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM2 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO2 = 1;// Configure GPIO2 as EPWM2A
GpioCtrlRegs.GPAMUX1.bit.GPIO3 = 1;// Configure GPIO3 as EPWM2B
EDIS;
}
//#endif // endif DSP28_EPWM2
//******************************************************************
// 函数名 :void InitEPwm3Gpio(void)
// 作者 :TI
// 功能 :初始化PWM3输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM3
void InitEPwm3Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.GpioCtrlRegs.GPAPUD.bit.GPIO4 = 1;// Disable pull-up on GPIO4 (EPWM3A)
GpioCtrlRegs.GPAPUD.bit.GPIO5 = 1;// Disable pull-up on GPIO5 (EPWM3B)
/* Configure EPwm-3 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM3 functional pins.
// Comment out other unwanted lines.GpioCtrlRegs.GPAMUX1.bit.GPIO4 = 1;// Configure GPIO4 as EPWM3A
GpioCtrlRegs.GPAMUX1.bit.GPIO5 = 1;// Configure GPIO5 as EPWM3B
EDIS;
}
//#endif // endif DSP28_EPWM3
//******************************************************************
// 函数名 :void InitEPwm4Gpio(void)
// 作者 :TI
// 功能 :初始化PWM4输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM4
void InitEPwm4Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1;// Disable pull-up on GPIO6 (EPWM4A)
GpioCtrlRegs.GPAPUD.bit.GPIO7 = 1;// Disable pull-up on GPIO7 (EPWM4B)
/* Configure EPWM-4 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM4 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 1;// Configure GPIO6 as EPWM4A
GpioCtrlRegs.GPAMUX1.bit.GPIO7 = 1;// Configure GPIO7 as EPWM4B
EDIS;
}
//#endif // endif DSP28_EPWM4
//******************************************************************
// 函数名 :void InitEPwm5Gpio(void)
// 作者 :
// 功能 :初始化PWM5输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :EPWM5模块只用到了GPIO9,故只初始化此管脚
//******************************************************************
//#if DSP28_EPWM5
void InitEPwm5Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO8 = 1;// Disable pull-up on GPIO8 (EPWM5A)
GpioCtrlRegs.GPAPUD.bit.GPIO9 = 1;// Disable pull-up on GPIO9 (EPWM5B)
/* Configure EPWM-5 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM5 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO8 = 1;// Configure GPIO8 as EPWM5A
GpioCtrlRegs.GPAMUX1.bit.GPIO9 = 1;// Configure GPIO9 as EPWM5B
EDIS;
}
//#endif // endif DSP28_EPWM5
//******************************************************************
// 函数名 :void InitEPwm6Gpio(void)
// 作者 :TI
// 功能 :初始化PWM6输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM6
void InitEPwm6Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO10 = 1;// Disable pull-up on GPIO10 (EPWM6A)//GpioCtrlRegs.GPAPUD.bit.GPIO11 = 1;// Disable pull-up on GPIO11 (EPWM6B)
/* Configure EPWM-6 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM6 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO10 = 1;// Configure GPIO10 as EPWM6A//GpioCtrlRegs.GPAMUX1.bit.GPIO11 = 1;// Configure GPIO11 as EPWM6B
EDIS;
}
//#endif // endif DSP28_EPWM6
//******************************************************************
// 函数名 :void InitEPwm7Gpio(void)
// 作者 :TI
// 功能 :初始化PWM7输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM7
void InitEPwm7Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.//GpioCtrlRegs.GPBPUD.bit.GPIO40 = 1;// Disable pull-up on GPIO40 (EPWM7A)
GpioCtrlRegs.GPBPUD.bit.GPIO41 = 1;// Disable pull-up on GPIO41 (EPWM7B)
/* Configure EPWM-7 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM7 functional pins.
// Comment out other unwanted lines.// GpioCtrlRegs.GPBMUX1.bit.GPIO40 = 1;// Configure GPIO40 as EPWM7A
GpioCtrlRegs.GPBMUX1.bit.GPIO41 = 1;// Configure GPIO41 as EPWM7B
EDIS;
}
//#endif // endif DSP28_EPWM7
//******************************************************************
// 函数名 :void InitEPwmSyncGpio(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as EPwm Synch pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitEPwmSyncGpio(void)
{
//EALLOW;
/* Configure EPWMSYNCI */
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO6 = 0;// Enable pull-up on GPIO6 (EPWMSYNCI)
GpioCtrlRegs.GPBPUD.bit.GPIO32 = 0;// Enable pull-up on GPIO32 (EPWMSYNCI)
/* Set qualification for selected pins to asynch only */
// This will select synch to SYSCLKOUT for the selected pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAQSEL1.bit.GPIO6 = 0;// Synch to SYSCLKOUT GPIO6 (EPWMSYNCI)
GpioCtrlRegs.GPBQSEL1.bit.GPIO32 = 0; // Synch to SYSCLKOUT GPIO32 (EPWMSYNCI)
/* Configure EPwmSync pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPwmSync functional pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 2;// Configures GPIO6 for EPWMSYNCI operation
GpioCtrlRegs.GPBMUX1.bit.GPIO32 = 2;// Configures GPIO32 for EPWMSYNCI operation.
/* Configure EPWMSYNC0 */
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1;// Disable pull-up on GPIO6 (EPWMSYNCO)
GpioCtrlRegs.GPBPUD.bit.GPIO33 = 1;// Disable pull-up on GPIO33 (EPWMSYNCO)
// GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 3;// Configures GPIO6 for EPWMSYNCO
GpioCtrlRegs.GPBMUX1.bit.GPIO33 = 2; // Configures GPIO33 for EPWMSYNCO
}
//******************************************************************
// 函数名 :void InitTzGpio(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as Trip Zone (TZ) pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//******************************************************************
void InitTzGpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO12 = 0;// Enable pull-up on GPIO12 (TZ1)
// GpioCtrlRegs.GPAPUD.bit.GPIO15 = 0;// Enable pull-up on GPIO15 (TZ1)
GpioCtrlRegs.GPAPUD.bit.GPIO13 = 0;// Enable pull-up on GPIO13 (TZ2)
// GpioCtrlRegs.GPAPUD.bit.GPIO16 = 0;// Enable pull-up on GPIO16 (TZ2)
// GpioCtrlRegs.GPAPUD.bit.GPIO28 = 0;// Enable pull-up on GPIO28 (TZ2)
GpioCtrlRegs.GPAPUD.bit.GPIO14 = 0;// Enable pull-up on GPIO14 (TZ3)
// GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0;// Enable pull-up on GPIO17 (TZ3)
// GpioCtrlRegs.GPAPUD.bit.GPIO29 = 0;// Enable pull-up on GPIO29 (TZ3)
/* Set qualification for selected pins to asynch only */
// Inputs are synchronized to SYSCLKOUT by default.
// This will select asynch (no qualification) for the selected pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAQSEL1.bit.GPIO12 = 3; // Asynch input GPIO12 (TZ1)
// GpioCtrlRegs.GPAQSEL1.bit.GPIO15 = 3; // Asynch input GPIO15 (TZ1)
GpioCtrlRegs.GPAQSEL1.bit.GPIO13 = 3; // Asynch input GPIO13 (TZ2)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO16 = 3; // Asynch input GPIO16 (TZ2)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO28 = 3; // Asynch input GPIO28 (TZ2)
GpioCtrlRegs.GPAQSEL1.bit.GPIO14 = 3; // Asynch input GPIO14 (TZ3)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO17 = 3; // Asynch input GPIO17 (TZ3)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO29 = 3; // Asynch input GPIO29 (TZ3)
/* Configure TZ pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be TZ functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO12 = 1; // Configure GPIO12 as TZ1
//GpioCtrlRegs.GPAMUX1.bit.GPIO15 = 1; // Configure GPIO15 as TZ1
GpioCtrlRegs.GPAMUX1.bit.GPIO13 = 1; // Configure GPIO13 as TZ2
// GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 3; // Configure GPIO16 as TZ2
// GpioCtrlRegs.GPAMUX2.bit.GPIO28 = 3; // Configure GPIO28 as TZ2
GpioCtrlRegs.GPAMUX1.bit.GPIO14 = 1; // Configure GPIO14 as TZ3
// GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 3; // Configure GPIO17 as TZ3
// GpioCtrlRegs.GPAMUX2.bit.GPIO29 = 3; // Configure GPIO29 as TZ3
EDIS;
}
//******************************************************************
// 函数名 :void InitEPwmDriver(void)
// 作者 篢I
// 功能 :初始低砅WM模块寄存髋渲?
// 参数 :无
// :无
// 调用全局变量?
//
// 备注
//******************************************************************
void InitEPwmDriver(void)
{
//#if DSP28_EPWM1InitEPwm1Driver();
//#endif
//#if DSP28_EPWM2
InitEPwm2Driver();
//#endif
//#if DSP28_EPWM3
InitEPwm3Driver();
//#endif
//#if DSP28_EPWM4
//InitEPwm4Driver();
//#endif
//#if DSP28_EPWM5
//InitEPwm5Driver();
//#endif
//#if DSP28_EPWM6
// InitEPwm6Driver();
//#endif
#if DSP28_EPWM7
// InitEPwm7Driver();
#endif
}
//******************************************************************
// 函数名 :void InitEPwm1Driver(void)
// 作者 :TI
// 功 :初始化系统ePWM1寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM1
void InitEPwm1Driver(void)
{
EALLOW;
EPwm1Regs.TBPRD = 3000;////PFSB_PERIOD,1250-48K
//EPwm1Regs.TBPRD = 1500;////PFSB_PERIOD,1250-48K
EPwm1Regs.TBPHS.all = 0;
EPwm1Regs.TBCTR = 0;
// Setup TBCLK
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
//EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW; //
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;//Count equal to zero; have a syn output
EPwm1Regs.TBCTL.bit.SWFSYNC = 0;
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; //
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm1Regs.TBCTL.bit.PHSDIR = 1;
EPwm1Regs.TBCTL.bit.FREE_SOFT = 3; //
// Setup compare
EPwm1Regs.CMPA.half.CMPA= 1500;
EPwm1Regs.CMPB = 1500;
EPwm1Regs.TBPHS.half.TBPHS = 0;
// Setup CMPCTL
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET;/////
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.ZRO = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CBU = AQ_SET;
//EPwm1Regs.AQSFRC.bit.RLDCSF = 0;
//Set DeadBand
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;//
EPwm1Regs.DBCTL.bit.IN_MODE = 0x0;
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm1Regs.DBFED = 200;//
//EPwm1Regs.DBRED = 200;//
EPwm1Regs.DBFED = 300;//
EPwm1Regs.DBRED = 300;//
//EPwm1Regs.DBCTL.bit.HALFCYCLE = 1;
// // Set ETSEL
EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // 2:0EPWMxINTn Select
EPwm1Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm1Regs.ETSEL.bit.SOCASEL = ET_CTRU_CMPA; // 10:8Start of conversion A Select
EPwm1Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm1Regs.ETSEL.bit.SOCBSEL = ET_CTRU_CMPB; // 14:12 Start of conversion B Select
EPwm1Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm1Regs.ETPS.bit.INTPRD = ET_1ST; // 1:0EPWMxINTn Period Select
EPwm1Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm1Regs.ETPS.bit.SOCAPRD = ET_1ST; // 9:8EPWMxSOCA Period Select
EPwm1Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm1Regs.ETPS.bit.SOCBPRD = 1; // 13:12 EPWMxSOCB Period Select
EPwm1Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
///////////////////////////////////////////////////////EPwm1Regs.TZSEL.bit.DCAEVT2 = 1;//////EPwm1Regs.TZSEL.bit.DCAEVT2 = 0;//////EPwm1Regs.TZSEL.bit.DCBEVT2 = 0;//////EPwm1Regs.TZSEL.bit.DCBEVT2 = 1;EPwm1Regs.TZSEL.bit.CBC1=1;
// What do we want the TZ1 and TZ2 to doEPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO;EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO;//EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCBH_LOW; //TZ_DCAH_HI;//EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_LOW;EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI;EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_HI;EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 2 output
EDIS;
}
#endif
//******************************************************************
// 函数名 :void InitEPwm2Driver(void)
// 作者 :TI
// 功能 初始化系统ePWM2寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM2
void InitEPwm2Driver(void)
{ EALLOW;
//SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
//EPwm2Regs.TBPRD = 1874;///48k
EPwm2Regs.TBPRD = 3000;///20k// Count up
//EPwm2Regs.TBPRD = 1500;///20k//Count updown
EPwm2Regs.TBPHS.all = 0;
EPwm2Regs.TBCTR = 0;
// Setup TBCLK
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
//EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;//Count updown
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Enable phase loading
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm2Regs.TBCTL.bit.SWFSYNC = 0;
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.PHSDIR = 1;
EPwm2Regs.TBCTL.bit.FREE_SOFT = 3; //
// Setup compare
EPwm2Regs.CMPA.half.CMPA= 1500;//
EPwm2Regs.CMPB= 1500;//
EPwm2Regs.TBPHS.half.TBPHS = 0;
// Setup CMPCTL
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm2Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.ZRO = AQ_CLEAR ;
EPwm2Regs.AQCTLB.bit.CBU = AQ_SET;
// EPwm2Regs.AQSFRC.bit.RLDCSF = 3;
//Set DeadBand
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;
EPwm2Regs.DBCTL.bit.IN_MODE = 0x0;
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm2Regs.DBFED = 200 ;//
//EPwm2Regs.DBRED = 200;
EPwm2Regs.DBFED = 300;//
EPwm2Regs.DBRED = 300;
////斩波比较模块
//EPwm2Regs.TZSEL.bit.DCAEVT2 = 1;
//EPwm2Regs.TZSEL.bit.DCAEVT2 = 0;
//EPwm2Regs.TZSEL.bit.DCBEVT2 = 0;
//EPwm2Regs.TZSEL.bit.DCBEVT2 = 1;
EPwm2Regs.TZSEL.bit.CBC1=1;// What do we want the TZ1 and TZ2 to do?EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;//EPwm2Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCBH_LOW;//EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;EPwm2Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI;EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_HI;EPwm2Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT; // DCAH = Comparator 2 outputEPwm2Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (not filtered)EPwm2Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async pathEPwm2Regs.TZEINT.bit.DCBEVT2=0;//??
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
#endif
//******************************************************************
// 函数名 :void InitEPwm3Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM3寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM3
void InitEPwm3Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
//EPwm3Regs.TBPRD = Motor_PERIOD;
EPwm3Regs.TBPRD = 3000;//1500;//C_MOTOR_PWM_PRD;
EPwm3Regs.TBPHS.all = 0;
EPwm3Regs.TBCTR = 0;
EPwm3Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
//EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // 对称波形输出
EPwm3Regs.TBCTL.bit.PHSEN = TB_DISABLE;// Disable phase loading
EPwm3Regs.TBCTL.bit.PRDLD = TB_SHADOW;
//EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // Count equal to zero; have a syn output
EPwm3Regs.TBCTL.bit.SWFSYNC = 0;
//EPwm3Regs.TBCTL.bit.HSPCLKDIV = 0x04;///1/8
EPwm3Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
// EPwm3Regs.TBCTL.bit.CLKDIV = 0x04;///1/16
EPwm3Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm3Regs.TBCTL.bit.PHSDIR = 1;
EPwm3Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compareEPwm3Regs.CMPA.half.CMPA =1500;
EPwm3Regs.CMPB = 0;
// Setup CMPCTL
EPwm3Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm3Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm3Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm3Regs.AQCTLA.bit.CAU = AQ_CLEAR; //
EPwm3Regs.AQCTLA.bit.PRD = AQ_SET; //
EPwm3Regs.AQCTLB.bit.CBU = AQ_SET; //
EPwm3Regs.AQCTLB.bit.PRD = AQ_CLEAR; //
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTR_PRD; // 2:0EPWMxINTn Select
EPwm3Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
/////////////////////////////////////////////////////
//死区模块(DB)配置
EPwm3Regs.DBCTL.bit.OUT_MODE =DB_FULL_ENABLE;
EPwm3Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
EPwm3Regs.DBCTL.bit.IN_MODE = 0;
//EPwm3Regs.DBCTL.bit.HALFCYCLE = 0;
EPwm3Regs.DBFED = 200;//Falling delay
EPwm3Regs.DBRED = 200; //Raising delay //0.01667*300=5U
// 事件触发模块(EZ)配置
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPA; // 2:0EPWMxINTn Select
EPwm3Regs.ETSEL.bit.INTEN = ET_DISABLE; // 3EPWMxINTn Enable
EPwm3Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // 10:8Start of conversion A Select
EPwm3Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm3Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm3Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm3Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm3Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm3Regs.ETPS.bit.SOCAPRD = 1; // 9:8EPWMxSOCA Period Select
EPwm3Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm3Regs.ETPS.bit.SOCBPRD = 1; // 13:12 EPWMxSOCB Period Select
EPwm3Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm4Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM4寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 送丝机H桥驱动
//******************************************************************
//#if DSP28_EPWM4
void InitEPwm4Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm4Regs.TBPRD = 1000;
EPwm4Regs.TBPHS.all = 0;
EPwm4Regs.TBCTR = 0;
EPwm4Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm4Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up and down
EPwm4Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm4Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm4Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;
EPwm4Regs.TBCTL.bit.SWFSYNC = 0;
EPwm4Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.PHSDIR = 1;
EPwm4Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm4Regs.CMPA.half.CMPA = Motor_PERIOD - 5;
EPwm4Regs.CMPB = 5;
// Setup CMPCTL
EPwm4Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm4Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm4Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm4Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm4Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM4A
EPwm4Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm4Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM4B
EPwm4Regs.AQCTLB.bit.CBD = AQ_SET;
// EPwm4Regs.AQSFRC.bit.RLDCSF = 3;
// Set deadband
// EPwm4Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;// Dead-band Output Mode Control
// EPwm4Regs.DBCTL.bit.POLSEL= DB_ACTV_HI;// Polarity Select Control
// EPwm4Regs.DBCTL.bit.IN_MODE = DBB_ALL;// Dead Band Input Mode Control
// EPwm4Regs.DBFED = 100;//Falling delay
// EPwm4Regs.DBRED = 100;//Raising delay
// Set ETSEL
EPwm4Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm4Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm4Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // 10:8Start of conversion A Select
EPwm4Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm4Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm4Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm4Regs.ETPS.bit.INTPRD = ET_1ST; // 1:0EPWMxINTn Period Select
EPwm4Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm4Regs.ETPS.bit.SOCAPRD = ET_1ST; // 9:8EPWMxSOCA Period Select
EPwm4Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm4Regs.ETPS.bit.SOCBPRD = ET_1ST; // 13:12 EPWMxSOCB Period Select
EPwm4Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm5Driver(void)
// 作者 :何志军
// 功能 :初始化系统ePWM5寄存髋渲?
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 送丝机H桥驱动
//******************************************************************
//#if DSP28_EPWM5
void InitEPwm5Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm5Regs.TBPRD = 1000;
EPwm5Regs.TBPHS.all = 0;
EPwm5Regs.TBCTR = 0;
// Setup TBCLK
EPwm5Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm5Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Disable phase loading
EPwm5Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm5Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm5Regs.TBCTL.bit.SWFSYNC = 0;
EPwm5Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.PHSDIR = 1;
EPwm5Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm5Regs.CMPA.half.CMPA = Motor_PERIOD - 5;
EPwm5Regs.CMPB = 5;
// Setup CMPCTL
EPwm5Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm5Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm5Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm5Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm5Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM6A
EPwm5Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm5Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM6B
EPwm5Regs.AQCTLB.bit.CBD = AQ_SET;
// set deadband
// EPwm5Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;// Dead-band Output Mode Control
// EPwm5Regs.DBCTL.bit.POLSEL= DB_ACTV_HI;// Polarity Select Control
// EPwm5Regs.DBCTL.bit.IN_MODE = DBB_ALL;// Dead Band Input Mode Control
// EPwm5Regs.DBFED = 100;//Falling delay
// EPwm5Regs.DBRED = 100;//Raising delay
EPwm5Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm5Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm5Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO;// 10:8Start of conversion A Select
EPwm5Regs.ETSEL.bit.SOCAEN = ET_DISABLE; // 11Start of conversion A Enable
EPwm5Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm5Regs.ETSEL.bit.SOCBEN = ET_DISABLE; // 15Start of conversion B Enable
EPwm5Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm5Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm5Regs.ETPS.bit.SOCAPRD = 0; // 9:8EPWMxSOCA Period Select
EPwm5Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm5Regs.ETPS.bit.SOCBPRD = 0; // 13:12 EPWMxSOCB Period Select
EPwm5Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm6Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM6寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 加热阀控制
//******************************************************************
//#if DSP28_EPWM6//
void InitEPwm6Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm6Regs.TBPRD = 1500;
EPwm6Regs.TBPHS.all = 0;
EPwm6Regs.TBCTR = 0;
EPwm6Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm6Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm6Regs.TBCTL.bit.PHSEN = TB_DISABLE;// Disable phase loading
EPwm6Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm6Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm6Regs.TBCTL.bit.SWFSYNC = 0;
EPwm6Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm6Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm6Regs.TBCTL.bit.PHSDIR = 1;
EPwm6Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm6Regs.CMPA.half.CMPA = 3;
// Setup CMPCTL
EPwm6Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm6Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm6Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm6Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm6Regs.AQCTLA.bit.CAU = AQ_CLEAR; // Set PWM6A
EPwm6Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm6Regs.ETSEL.bit.INTSEL = ET_CTR_PRD; // 2:0EPWMxINTn Select
EPwm6Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm6Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm6Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm6Regs.AQCSFRC.bit.CSFA = 0;
EPwm6Regs.AQCSFRC.bit.CSFB = 0;// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm7Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM7寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改绷浚何?
// 备注 : Slope Compensation PWM Control (Hardware
//******************************************************************
//#if DSP28_EPWM7
void InitEPwm7Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm7Regs.TBPRD = 1000;//3130--10K
EPwm7Regs.TBPHS.all = 0;
EPwm7Regs.TBCTR = 0;
EPwm7Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm7Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm7Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm7Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm7Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm7Regs.TBCTL.bit.SWFSYNC = 0;
EPwm7Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm7Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm7Regs.TBCTL.bit.PHSDIR = 1;
EPwm7Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm7Regs.CMPB = 0;
// Setup CMPCTL
EPwm7Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm7Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm7Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm7Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
// EPwm7Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM7B
// EPwm7Regs.AQCTLB.bit.CBD = AQ_SET;
EPwm7Regs.AQCTLB.bit.ZRO = AQ_SET;
EPwm7Regs.AQCTLB.bit.CBU = AQ_CLEAR;
EPwm7Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm7Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm7Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm7Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
/******************************************************************/
//函数名:void InitTzDriver(void)
//功能:Initialize the TZ Module for epwm1,epwm2,epwm4,epwm5 and epwm6 of WPPM3312Z
//备注:2015.06.25
//===========================================================================
void InitTzDriver(void)
{// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm1 Module
EALLOW;
EPwm1Regs.TZSEL.bit.CBC1 = 1;
//EPwm1Regs.TZSEL.bit.OSHT1 = 1;
//EPwm1Regs.TZSEL.bit.DCBEVT1 = 1;
EPwm1Regs.TZSEL.bit.DCAEVT1 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
EPwm1Regs.TZCTL.bit.DCAEVT1 = 2;
// EPwm1Regs.TZCTL.bit.DCBEVT1= 2;
// EPwm1Regs.TZDCSEL.bit.DCBEVT1 = TZ_DCBH_LOW;
EPwm1Regs.TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI;
// Enable TZ interrupt
// EPwm1Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1\TZ2 and TZ3 as one shot trip sources on EPwm2 Module
// EALLOW;
EPwm2Regs.TZSEL.bit.CBC1 = 1;
//EPwm2Regs.TZSEL.bit.OSHT1 = 1;
// EPwm2Regs.TZSEL.bit.DCBEVT1= 1;
EPwm2Regs.TZSEL.bit.DCAEVT1= 1;
// What do we want the TZ1 and TZ2 to do?
EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.DCAEVT1 = 2;
// EPwm2Regs.TZCTL.bit.DCBEVT1 = 2;
// EPwm2Regs.TZDCSEL.bit.DCBEVT1 = TZ_DCBH_LOW;
EPwm2Regs.TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI;
// Enable TZ interrupt
// EPwm2Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm4 Module
EPwm3Regs.TZSEL.bit.CBC3 = 1;//FAN
EPwm3Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EALLOW;
// EPwm4Regs.TZSEL.bit.CBC1 = 1;
EPwm4Regs.TZSEL.bit.DCAEVT2 = 1;
// EPwm4Regs.TZSEL.bit.DCBEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm4Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm4Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm4Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm4Regs.TZCTL.bit.DCBEVT2 = 2;
// EPwm4Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;
EPwm4Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// Enable TZ interrupt
// EPwm4Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm5 Module
// EALLOW;
// EPwm5Regs.TZSEL.bit.CBC1 = 1;
// EPwm5Regs.TZSEL.bit.CBC2 = 1;
//EPwm5Regs.TZSEL.bit.CBC3 = 1;//FAN
EPwm5Regs.TZSEL.bit.DCAEVT2 = 1;
// EPwm5Regs.TZSEL.bit.DCAEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm5Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm5Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm5Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm5Regs.TZCTL.bit.DCBEVT2 = 2;
EPwm5Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// EPwm5Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// Enable TZ interrupt
// EPwm5Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1\TZ2 and TZ3 as one shot trip sources on EPwm3 Module
// EALLOW;
// EPwm6Regs.TZSEL.bit.CBC1 = 1;
EPwm6Regs.TZSEL.bit.CBC2 = 1;///JRF
// EPwm6Regs.TZSEL.bit.CBC3 = 1;
// EPwm6Regs.TZSEL.bit.DCAEVT2= 1;
// EPwm6Regs.TZSEL.bit.DCBEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm6Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
// EPwm6Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm6Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm6Regs.TZCTL.bit.DCBEVT2 = 2;
// EPwm6Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;
// EPwm6Regs.TZDCSEL.bit.DCAEVT2= TZ_DCAH_HI;
// EPwm7Regs.TZSEL.bit.CBC2 = 1;//JRF
// EPwm7Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
// Enable TZ interrupt
// EPwm6Regs.TZEINT.bit.OST = 1;
EDIS;
}
/***********************************************************/
//函数名:void InitDCEventDriver
//功能:Initialize Digtal Compare Event Module
//备注:DC Event for protecting Power and Motor
//===========================================================================
void InitDCEventDriver(void)
{
// Define an event (DCAEVT1) based on TZ1 and TZ2
EALLOW;
EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 1 output and TZ1 input
// EPwm1Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_TZ1 ;
EPwm1Regs.DCACTL.bit.EVT1SRCSEL = DC_EVT1;// DCAEVT1 = DCAEVT1(not filtered)
EPwm1Regs.DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC;
EPwm2Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 1 output AND TZ1 input
// EPwm2Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_TZ1;
EPwm2Regs.DCACTL.bit.EVT1SRCSEL = DC_EVT1;// DCAEVT1 = DCAEVT1 (not filtered)
EPwm2Regs.DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC;
EPwm4Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT;// DCAH = Comparator 2 output
EPwm4Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (not filtered)
EPwm4Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async path
EPwm5Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT;// DCAH = Comparator 2 output
EPwm5Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2= DCAEVT2 (not filtered)
EPwm5Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async path
EDIS;
}
//===========================================================================
// End of file.
//===========================================================================
----------------------以上为DSP2803x_EPwm.c-----------------------------------------------------------
ke ma:
回复 Jordan Zhou:
DACVAL的更新在中断函数里面,它是PI计算出来的值,一个PWM周期更新一次。
在使用TMS320f28034这款芯片的单周期斩波功能,遇到了一些问题如下:
ePWM的频率设置为20kHZ;ePWM1,ePWM2,ePWM3同步;ePWM1A和ePWM2A驱动全桥,控制逆变电源(ePWM1B和ePWM2B不使用);ePWM3A和ePWM3B用来做斜波补偿,和电流反馈信号一起从Comp1的一个端口进入,Comp1的另一个端口为软件计算的值写入DACVAL,对ePWM1A,ePWM2A进行斩波。现在发现在一个ePWM周期内出现多次斩波的现象。见附件。
下图通道1为全桥驱动;通道2为ePWM1A(最大占空比设置为50%);通道3为ePWM2A(最大占空比设置为50%);通道4为ePWM3A(占空比设置为50%)和ePWM3B(占空比设置为50%)+反馈电流;a b之间为一个周期。
//###########################################################################
//
// FILE:DSP2803x_Comp.c
//
// TITLE:DSP2803x Comparator Initialization & Support Functions.
//
//###########################################################################
// $TI Release: F2803x C/C++ Header Files and Peripheral Examples V127 $
// $Release Date: March 30, 2013 $
//###########################################################################
#include "DSP2803x_Device.h"// DSP2803x Headerfile Include File
#include "DSP2803x_Examples.h"// DSP2803x Examples Include File
void InitCompDriver(void);
void InitCompGpio(void);
void InitComp(void);
void InitComp(void)
{
InitCompGpio();
InitCompDriver();
}
void InitCompGpio()
{InitComp1Gpio();
}
void InitComp1Gpio()
{EALLOW;GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1;// Disable pull-up for GPIO1 (CMP1OUT)GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 3;// Configure GPIO1 for CMP1OUT operationGpioCtrlRegs.AIOMUX1.bit.AIO2 = 2;// Configure AIO2 for CMP1A (analog input) operationSysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;//EDIS;
}
#if DSP28_COMP2
void InitComp2Gpio()
{EALLOW;GpioCtrlRegs.AIOMUX1.bit.AIO4 = 2;// Configure AIO4 for CMP2A (analog input) operationEDIS;
}
#endif //end DSP28_COMP2
#if DSP28_COMP3
void InitComp3Gpio()
{EALLOW;GpioCtrlRegs.AIOMUX1.bit.AIO6 = 2;// Configure AIO6 for CMP3A (analog input) operationEDIS;
}
#endif //end DSP28_COMP3
/**********************************************************************************/
//函数名:void IntiCompDriver(void);
//功能:比较器模块初始化
//备注:
/*********************************************************************************/
void InitCompDriver()
{EALLOW;SysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;// Enable clock to the Comparator 1 blockComp1Regs.DACVAL.bit.DACVAL = 300;//C_CTCurr_Pro;Comp1Regs.COMPCTL.bit.COMPDACEN = 1;// Power up Comparator 1 locallyComp1Regs.COMPCTL.bit.COMPSOURCE = 0;Comp1Regs.COMPCTL.bit.CMPINV = 0;Comp1Regs.COMPCTL.bit.QUALSEL = 6;Comp1Regs.COMPCTL.bit.SYNCSEL =1;EDIS;
}
//===========================================================================
// End of file.
//===========================================================================
-----------------------------------以上为DSP2803x_Comp.c----------------------------------------------------------------
//**************************************************************************
// Copyright(c)2017-DR_Welding
// 文件名称 : WPCM2315CU2_Isr.c
// 作者 :
// 模块功能 :系统中断
// 局部函数列表: 无
// 更改记录 :
// 日期 DR版本 作者 备注
//
//**************************************************************************
#define in_interrupt
#include "DSP2803x_Header.h"// Headerfile Include File
#include "WPPM3312M2_Isr.h"
#include "WPPM3312M2_SysReg.h"
#include "WPPM3312M2_SysMacro.h"
#include "WPPM3312M2_GlobalVarDef.h"
#include "WPPM3312M2_EepromDriver.h"
#include "WPPM3312M2_Can.h"
#include "WPPM3312M2_Struct.h"
//#include"WPPM3312M2_LedShow.h"
#include"WPPM3312M2_KeyDispose.h"
//============================
// 内部函数声明
//============================
void vPwm1IntIsr(void);
void vTimer0IntIsr(void);
void IsrVarInit(void);
//******************************************************************
// 函数名 :void InitInterrupt(void)
// 作者 :
// 功能 :中断模块初始化
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitInterrupt(void)
{EALLOW;
// 定义PWM1的中断向量PieVectTable.EPWM1_INT = &vPwm1IntIsr;PieCtrlRegs.PIEIER3.bit.INTx1 = 1;IER |= M_INT3;EDIS;
}
//******************************************************************
// 函数名 :void vPwm1IntIsr(void)
// 作者 :
// 功能 :主拓扑PWM中断
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
interrupt void vPwm1IntIsr(void)
{
//========= 更新主功率移相角=========mEnablePowerPwm();
mSetPwm1Duty(1500);
PidLogic();//PI处理
//======================== 清中断标志并再次使能中断 ===========================
EPwm1Regs.ETCLR.bit.INT = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
/****************************************************************************/
//函数名:void PidUpGrading(int PidResult);
// 作者 :MaKe
//功能:比较器模块更新PID计算结果
// 参数 :PidResult :PID计算结果
// 祷?:无
// 调用全局变量:无
// 修改全局变量:无
//备注:2018.06.29
/************************************************************************/
void PidUpGrading(int PidResult)
{EALLOW;Comp1Regs.DACVAL.bit.DACVAL = PidResult; //C_CTCurr_Pro;//原边过流保护点EDIS;
}
------------------------------以上为WPCM2315CU2_Isr.c------------------------------------------------------------------------------//**************************************************************************
// ***
// 文件名称 : DSP2803x_EPwm.c
// 作者 :
// 模块功能 :DSP2803x EPwm Initialization & Support Functions.
// 局部函数列表: 无
// 版本信息 : TI File $Revision: /main/3 $
// Checkin $Date: November 10, 200914:05:11 $
// $TI Release: 2803x C/C++ Header Files V1.21 $
// $Release Date: December 1, 2009 $
// 更改记录 :
//**************************************************************************
#include "DSP2803x_Header.h"// Headerfile Include File
#include "WPPM3312M2_SysMacro.h"
#include "WPPM3312M2_SysReg.h"
#include "DSP2803x_Device.h"
//============================
// 内部函数声明
//============================
void InitEPwmGpio(void);
void InitEPwm1Gpio(void);
void InitEPwm2Gpio(void);
void InitEPwm3Gpio(void);
void InitEPwm4Gpio(void);
void InitEPwm5Gpio(void);
void InitEPwm6Gpio(void);
void InitEPwm7Gpio(void);
void InitEPwmDriver(void);
void InitEPwm1Driver(void);
void InitEPwm2Driver(void);
void InitEPwm3Driver(void);
void InitEPwm4Driver(void);
void InitEPwm5Driver(void);
void InitEPwm6Driver(void);
void InitEPwm7Driver(void);
void InitTzGpio(void);
void InitTzDriver(void);
void InitDCEventDriver(void);
//******************************************************************
// 函数名 :void InitEPwm(void)
// 作者 :TI
// 功能 :初始化系统PWM模块及管脚设置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitEPwm(void)
{
// 配置管脚功能
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
InitEPwmGpio();
// InitTzGpio();
// 初始化寄存器
// InitTzDriver();
// InitDCEventDriver();
InitEPwmDriver();
//mUpDatePwm2Phase(0);
mUpDatePwm2Phase(1500);
//mSetPwm4BDuty(0);
mDisablePowerPwm();
mDisableMotorPWM();
mEnableMotorPWM();//////使能PWM3
// mDisableJRFPWM();
// mDisableFANPWM();
// mDebugPWM(1000);
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
}
//******************************************************************
// 函数名 :void InitEPwmDriver(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as EPwm pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//******************************************************************
void InitEPwmGpio(void)
{
#if DSP28_EPWM1InitEPwm1Gpio();
#endif // endif DSP28_EPWM1
#if DSP28_EPWM2InitEPwm2Gpio();
#endif // endif DSP28_EPWM2
#if DSP28_EPWM3InitEPwm3Gpio();
#endif // endif DSP28_EPWM3
#if DSP28_EPWM4// InitEPwm4Gpio();
#endif // endif DSP28_EPWM4
#if DSP28_EPWM5//InitEPwm5Gpio();
#endif // endif DSP28_EPWM5
#if DSP28_EPWM6//InitEPwm6Gpio();
#endif // endif DSP28_EPWM6
#if DSP28_EPWM7//InitEPwm7Gpio();
#endif // endif DSP28_EPWM7
}
//******************************************************************
// 函数名 :void InitEPwm1Gpio(void)
// 作者 :TI
// 功能 :初始化PWM1输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM1
void InitEPwm1Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO0 = 1;// Disable pull-up on GPIO0 (EPWM1A)
GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1;// Disable pull-up on GPIO1 (EPWM1B)
/* Configure EPWM-1 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM1 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 1;// Configure GPIO0 as EPWM1A
GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 1;// Configure GPIO1 as EPWM1B
EDIS;
}
#endif // endif DSP28_EPWM1
//******************************************************************
// 函数名 :void InitEPwm2Gpio(void)
// 作者 :TI
// 功能 :初始化PWM2输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM2
void InitEPwm2Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1;// Disable pull-up on GPIO2 (EPWM2A)
GpioCtrlRegs.GPAPUD.bit.GPIO3 = 1;// Disable pull-up on GPIO3 (EPWM2B)
/* Configure EPwm-2 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM2 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO2 = 1;// Configure GPIO2 as EPWM2A
GpioCtrlRegs.GPAMUX1.bit.GPIO3 = 1;// Configure GPIO3 as EPWM2B
EDIS;
}
//#endif // endif DSP28_EPWM2
//******************************************************************
// 函数名 :void InitEPwm3Gpio(void)
// 作者 :TI
// 功能 :初始化PWM3输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM3
void InitEPwm3Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.GpioCtrlRegs.GPAPUD.bit.GPIO4 = 1;// Disable pull-up on GPIO4 (EPWM3A)
GpioCtrlRegs.GPAPUD.bit.GPIO5 = 1;// Disable pull-up on GPIO5 (EPWM3B)
/* Configure EPwm-3 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM3 functional pins.
// Comment out other unwanted lines.GpioCtrlRegs.GPAMUX1.bit.GPIO4 = 1;// Configure GPIO4 as EPWM3A
GpioCtrlRegs.GPAMUX1.bit.GPIO5 = 1;// Configure GPIO5 as EPWM3B
EDIS;
}
//#endif // endif DSP28_EPWM3
//******************************************************************
// 函数名 :void InitEPwm4Gpio(void)
// 作者 :TI
// 功能 :初始化PWM4输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM4
void InitEPwm4Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1;// Disable pull-up on GPIO6 (EPWM4A)
GpioCtrlRegs.GPAPUD.bit.GPIO7 = 1;// Disable pull-up on GPIO7 (EPWM4B)
/* Configure EPWM-4 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM4 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 1;// Configure GPIO6 as EPWM4A
GpioCtrlRegs.GPAMUX1.bit.GPIO7 = 1;// Configure GPIO7 as EPWM4B
EDIS;
}
//#endif // endif DSP28_EPWM4
//******************************************************************
// 函数名 :void InitEPwm5Gpio(void)
// 作者 :
// 功能 :初始化PWM5输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :EPWM5模块只用到了GPIO9,故只初始化此管脚
//******************************************************************
//#if DSP28_EPWM5
void InitEPwm5Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO8 = 1;// Disable pull-up on GPIO8 (EPWM5A)
GpioCtrlRegs.GPAPUD.bit.GPIO9 = 1;// Disable pull-up on GPIO9 (EPWM5B)
/* Configure EPWM-5 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM5 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO8 = 1;// Configure GPIO8 as EPWM5A
GpioCtrlRegs.GPAMUX1.bit.GPIO9 = 1;// Configure GPIO9 as EPWM5B
EDIS;
}
//#endif // endif DSP28_EPWM5
//******************************************************************
// 函数名 :void InitEPwm6Gpio(void)
// 作者 :TI
// 功能 :初始化PWM6输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM6
void InitEPwm6Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO10 = 1;// Disable pull-up on GPIO10 (EPWM6A)//GpioCtrlRegs.GPAPUD.bit.GPIO11 = 1;// Disable pull-up on GPIO11 (EPWM6B)
/* Configure EPWM-6 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM6 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO10 = 1;// Configure GPIO10 as EPWM6A//GpioCtrlRegs.GPAMUX1.bit.GPIO11 = 1;// Configure GPIO11 as EPWM6B
EDIS;
}
//#endif // endif DSP28_EPWM6
//******************************************************************
// 函数名 :void InitEPwm7Gpio(void)
// 作者 :TI
// 功能 :初始化PWM7输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM7
void InitEPwm7Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.//GpioCtrlRegs.GPBPUD.bit.GPIO40 = 1;// Disable pull-up on GPIO40 (EPWM7A)
GpioCtrlRegs.GPBPUD.bit.GPIO41 = 1;// Disable pull-up on GPIO41 (EPWM7B)
/* Configure EPWM-7 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM7 functional pins.
// Comment out other unwanted lines.// GpioCtrlRegs.GPBMUX1.bit.GPIO40 = 1;// Configure GPIO40 as EPWM7A
GpioCtrlRegs.GPBMUX1.bit.GPIO41 = 1;// Configure GPIO41 as EPWM7B
EDIS;
}
//#endif // endif DSP28_EPWM7
//******************************************************************
// 函数名 :void InitEPwmSyncGpio(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as EPwm Synch pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitEPwmSyncGpio(void)
{
//EALLOW;
/* Configure EPWMSYNCI */
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO6 = 0;// Enable pull-up on GPIO6 (EPWMSYNCI)
GpioCtrlRegs.GPBPUD.bit.GPIO32 = 0;// Enable pull-up on GPIO32 (EPWMSYNCI)
/* Set qualification for selected pins to asynch only */
// This will select synch to SYSCLKOUT for the selected pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAQSEL1.bit.GPIO6 = 0;// Synch to SYSCLKOUT GPIO6 (EPWMSYNCI)
GpioCtrlRegs.GPBQSEL1.bit.GPIO32 = 0; // Synch to SYSCLKOUT GPIO32 (EPWMSYNCI)
/* Configure EPwmSync pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPwmSync functional pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 2;// Configures GPIO6 for EPWMSYNCI operation
GpioCtrlRegs.GPBMUX1.bit.GPIO32 = 2;// Configures GPIO32 for EPWMSYNCI operation.
/* Configure EPWMSYNC0 */
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1;// Disable pull-up on GPIO6 (EPWMSYNCO)
GpioCtrlRegs.GPBPUD.bit.GPIO33 = 1;// Disable pull-up on GPIO33 (EPWMSYNCO)
// GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 3;// Configures GPIO6 for EPWMSYNCO
GpioCtrlRegs.GPBMUX1.bit.GPIO33 = 2; // Configures GPIO33 for EPWMSYNCO
}
//******************************************************************
// 函数名 :void InitTzGpio(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as Trip Zone (TZ) pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//******************************************************************
void InitTzGpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO12 = 0;// Enable pull-up on GPIO12 (TZ1)
// GpioCtrlRegs.GPAPUD.bit.GPIO15 = 0;// Enable pull-up on GPIO15 (TZ1)
GpioCtrlRegs.GPAPUD.bit.GPIO13 = 0;// Enable pull-up on GPIO13 (TZ2)
// GpioCtrlRegs.GPAPUD.bit.GPIO16 = 0;// Enable pull-up on GPIO16 (TZ2)
// GpioCtrlRegs.GPAPUD.bit.GPIO28 = 0;// Enable pull-up on GPIO28 (TZ2)
GpioCtrlRegs.GPAPUD.bit.GPIO14 = 0;// Enable pull-up on GPIO14 (TZ3)
// GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0;// Enable pull-up on GPIO17 (TZ3)
// GpioCtrlRegs.GPAPUD.bit.GPIO29 = 0;// Enable pull-up on GPIO29 (TZ3)
/* Set qualification for selected pins to asynch only */
// Inputs are synchronized to SYSCLKOUT by default.
// This will select asynch (no qualification) for the selected pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAQSEL1.bit.GPIO12 = 3; // Asynch input GPIO12 (TZ1)
// GpioCtrlRegs.GPAQSEL1.bit.GPIO15 = 3; // Asynch input GPIO15 (TZ1)
GpioCtrlRegs.GPAQSEL1.bit.GPIO13 = 3; // Asynch input GPIO13 (TZ2)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO16 = 3; // Asynch input GPIO16 (TZ2)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO28 = 3; // Asynch input GPIO28 (TZ2)
GpioCtrlRegs.GPAQSEL1.bit.GPIO14 = 3; // Asynch input GPIO14 (TZ3)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO17 = 3; // Asynch input GPIO17 (TZ3)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO29 = 3; // Asynch input GPIO29 (TZ3)
/* Configure TZ pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be TZ functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO12 = 1; // Configure GPIO12 as TZ1
//GpioCtrlRegs.GPAMUX1.bit.GPIO15 = 1; // Configure GPIO15 as TZ1
GpioCtrlRegs.GPAMUX1.bit.GPIO13 = 1; // Configure GPIO13 as TZ2
// GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 3; // Configure GPIO16 as TZ2
// GpioCtrlRegs.GPAMUX2.bit.GPIO28 = 3; // Configure GPIO28 as TZ2
GpioCtrlRegs.GPAMUX1.bit.GPIO14 = 1; // Configure GPIO14 as TZ3
// GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 3; // Configure GPIO17 as TZ3
// GpioCtrlRegs.GPAMUX2.bit.GPIO29 = 3; // Configure GPIO29 as TZ3
EDIS;
}
//******************************************************************
// 函数名 :void InitEPwmDriver(void)
// 作者 篢I
// 功能 :初始低砅WM模块寄存髋渲?
// 参数 :无
// :无
// 调用全局变量?
//
// 备注
//******************************************************************
void InitEPwmDriver(void)
{
//#if DSP28_EPWM1InitEPwm1Driver();
//#endif
//#if DSP28_EPWM2
InitEPwm2Driver();
//#endif
//#if DSP28_EPWM3
InitEPwm3Driver();
//#endif
//#if DSP28_EPWM4
//InitEPwm4Driver();
//#endif
//#if DSP28_EPWM5
//InitEPwm5Driver();
//#endif
//#if DSP28_EPWM6
// InitEPwm6Driver();
//#endif
#if DSP28_EPWM7
// InitEPwm7Driver();
#endif
}
//******************************************************************
// 函数名 :void InitEPwm1Driver(void)
// 作者 :TI
// 功 :初始化系统ePWM1寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM1
void InitEPwm1Driver(void)
{
EALLOW;
EPwm1Regs.TBPRD = 3000;////PFSB_PERIOD,1250-48K
//EPwm1Regs.TBPRD = 1500;////PFSB_PERIOD,1250-48K
EPwm1Regs.TBPHS.all = 0;
EPwm1Regs.TBCTR = 0;
// Setup TBCLK
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
//EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW; //
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;//Count equal to zero; have a syn output
EPwm1Regs.TBCTL.bit.SWFSYNC = 0;
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; //
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm1Regs.TBCTL.bit.PHSDIR = 1;
EPwm1Regs.TBCTL.bit.FREE_SOFT = 3; //
// Setup compare
EPwm1Regs.CMPA.half.CMPA= 1500;
EPwm1Regs.CMPB = 1500;
EPwm1Regs.TBPHS.half.TBPHS = 0;
// Setup CMPCTL
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET;/////
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.ZRO = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CBU = AQ_SET;
//EPwm1Regs.AQSFRC.bit.RLDCSF = 0;
//Set DeadBand
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;//
EPwm1Regs.DBCTL.bit.IN_MODE = 0x0;
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm1Regs.DBFED = 200;//
//EPwm1Regs.DBRED = 200;//
EPwm1Regs.DBFED = 300;//
EPwm1Regs.DBRED = 300;//
//EPwm1Regs.DBCTL.bit.HALFCYCLE = 1;
// // Set ETSEL
EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // 2:0EPWMxINTn Select
EPwm1Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm1Regs.ETSEL.bit.SOCASEL = ET_CTRU_CMPA; // 10:8Start of conversion A Select
EPwm1Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm1Regs.ETSEL.bit.SOCBSEL = ET_CTRU_CMPB; // 14:12 Start of conversion B Select
EPwm1Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm1Regs.ETPS.bit.INTPRD = ET_1ST; // 1:0EPWMxINTn Period Select
EPwm1Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm1Regs.ETPS.bit.SOCAPRD = ET_1ST; // 9:8EPWMxSOCA Period Select
EPwm1Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm1Regs.ETPS.bit.SOCBPRD = 1; // 13:12 EPWMxSOCB Period Select
EPwm1Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
///////////////////////////////////////////////////////EPwm1Regs.TZSEL.bit.DCAEVT2 = 1;//////EPwm1Regs.TZSEL.bit.DCAEVT2 = 0;//////EPwm1Regs.TZSEL.bit.DCBEVT2 = 0;//////EPwm1Regs.TZSEL.bit.DCBEVT2 = 1;EPwm1Regs.TZSEL.bit.CBC1=1;
// What do we want the TZ1 and TZ2 to doEPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO;EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO;//EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCBH_LOW; //TZ_DCAH_HI;//EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_LOW;EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI;EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_HI;EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 2 output
EDIS;
}
#endif
//******************************************************************
// 函数名 :void InitEPwm2Driver(void)
// 作者 :TI
// 功能 初始化系统ePWM2寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM2
void InitEPwm2Driver(void)
{ EALLOW;
//SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
//EPwm2Regs.TBPRD = 1874;///48k
EPwm2Regs.TBPRD = 3000;///20k// Count up
//EPwm2Regs.TBPRD = 1500;///20k//Count updown
EPwm2Regs.TBPHS.all = 0;
EPwm2Regs.TBCTR = 0;
// Setup TBCLK
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
//EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;//Count updown
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Enable phase loading
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm2Regs.TBCTL.bit.SWFSYNC = 0;
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.PHSDIR = 1;
EPwm2Regs.TBCTL.bit.FREE_SOFT = 3; //
// Setup compare
EPwm2Regs.CMPA.half.CMPA= 1500;//
EPwm2Regs.CMPB= 1500;//
EPwm2Regs.TBPHS.half.TBPHS = 0;
// Setup CMPCTL
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm2Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.ZRO = AQ_CLEAR ;
EPwm2Regs.AQCTLB.bit.CBU = AQ_SET;
// EPwm2Regs.AQSFRC.bit.RLDCSF = 3;
//Set DeadBand
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;
EPwm2Regs.DBCTL.bit.IN_MODE = 0x0;
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm2Regs.DBFED = 200 ;//
//EPwm2Regs.DBRED = 200;
EPwm2Regs.DBFED = 300;//
EPwm2Regs.DBRED = 300;
////斩波比较模块
//EPwm2Regs.TZSEL.bit.DCAEVT2 = 1;
//EPwm2Regs.TZSEL.bit.DCAEVT2 = 0;
//EPwm2Regs.TZSEL.bit.DCBEVT2 = 0;
//EPwm2Regs.TZSEL.bit.DCBEVT2 = 1;
EPwm2Regs.TZSEL.bit.CBC1=1;// What do we want the TZ1 and TZ2 to do?EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;//EPwm2Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCBH_LOW;//EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;EPwm2Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI;EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_HI;EPwm2Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT; // DCAH = Comparator 2 outputEPwm2Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (not filtered)EPwm2Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async pathEPwm2Regs.TZEINT.bit.DCBEVT2=0;//??
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
#endif
//******************************************************************
// 函数名 :void InitEPwm3Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM3寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM3
void InitEPwm3Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
//EPwm3Regs.TBPRD = Motor_PERIOD;
EPwm3Regs.TBPRD = 3000;//1500;//C_MOTOR_PWM_PRD;
EPwm3Regs.TBPHS.all = 0;
EPwm3Regs.TBCTR = 0;
EPwm3Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
//EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // 对称波形输出
EPwm3Regs.TBCTL.bit.PHSEN = TB_DISABLE;// Disable phase loading
EPwm3Regs.TBCTL.bit.PRDLD = TB_SHADOW;
//EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // Count equal to zero; have a syn output
EPwm3Regs.TBCTL.bit.SWFSYNC = 0;
//EPwm3Regs.TBCTL.bit.HSPCLKDIV = 0x04;///1/8
EPwm3Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
// EPwm3Regs.TBCTL.bit.CLKDIV = 0x04;///1/16
EPwm3Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm3Regs.TBCTL.bit.PHSDIR = 1;
EPwm3Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compareEPwm3Regs.CMPA.half.CMPA =1500;
EPwm3Regs.CMPB = 0;
// Setup CMPCTL
EPwm3Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm3Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm3Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm3Regs.AQCTLA.bit.CAU = AQ_CLEAR; //
EPwm3Regs.AQCTLA.bit.PRD = AQ_SET; //
EPwm3Regs.AQCTLB.bit.CBU = AQ_SET; //
EPwm3Regs.AQCTLB.bit.PRD = AQ_CLEAR; //
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTR_PRD; // 2:0EPWMxINTn Select
EPwm3Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
/////////////////////////////////////////////////////
//死区模块(DB)配置
EPwm3Regs.DBCTL.bit.OUT_MODE =DB_FULL_ENABLE;
EPwm3Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
EPwm3Regs.DBCTL.bit.IN_MODE = 0;
//EPwm3Regs.DBCTL.bit.HALFCYCLE = 0;
EPwm3Regs.DBFED = 200;//Falling delay
EPwm3Regs.DBRED = 200; //Raising delay //0.01667*300=5U
// 事件触发模块(EZ)配置
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPA; // 2:0EPWMxINTn Select
EPwm3Regs.ETSEL.bit.INTEN = ET_DISABLE; // 3EPWMxINTn Enable
EPwm3Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // 10:8Start of conversion A Select
EPwm3Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm3Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm3Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm3Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm3Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm3Regs.ETPS.bit.SOCAPRD = 1; // 9:8EPWMxSOCA Period Select
EPwm3Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm3Regs.ETPS.bit.SOCBPRD = 1; // 13:12 EPWMxSOCB Period Select
EPwm3Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm4Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM4寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 送丝机H桥驱动
//******************************************************************
//#if DSP28_EPWM4
void InitEPwm4Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm4Regs.TBPRD = 1000;
EPwm4Regs.TBPHS.all = 0;
EPwm4Regs.TBCTR = 0;
EPwm4Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm4Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up and down
EPwm4Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm4Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm4Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;
EPwm4Regs.TBCTL.bit.SWFSYNC = 0;
EPwm4Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.PHSDIR = 1;
EPwm4Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm4Regs.CMPA.half.CMPA = Motor_PERIOD - 5;
EPwm4Regs.CMPB = 5;
// Setup CMPCTL
EPwm4Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm4Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm4Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm4Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm4Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM4A
EPwm4Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm4Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM4B
EPwm4Regs.AQCTLB.bit.CBD = AQ_SET;
// EPwm4Regs.AQSFRC.bit.RLDCSF = 3;
// Set deadband
// EPwm4Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;// Dead-band Output Mode Control
// EPwm4Regs.DBCTL.bit.POLSEL= DB_ACTV_HI;// Polarity Select Control
// EPwm4Regs.DBCTL.bit.IN_MODE = DBB_ALL;// Dead Band Input Mode Control
// EPwm4Regs.DBFED = 100;//Falling delay
// EPwm4Regs.DBRED = 100;//Raising delay
// Set ETSEL
EPwm4Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm4Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm4Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // 10:8Start of conversion A Select
EPwm4Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm4Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm4Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm4Regs.ETPS.bit.INTPRD = ET_1ST; // 1:0EPWMxINTn Period Select
EPwm4Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm4Regs.ETPS.bit.SOCAPRD = ET_1ST; // 9:8EPWMxSOCA Period Select
EPwm4Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm4Regs.ETPS.bit.SOCBPRD = ET_1ST; // 13:12 EPWMxSOCB Period Select
EPwm4Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm5Driver(void)
// 作者 :何志军
// 功能 :初始化系统ePWM5寄存髋渲?
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 送丝机H桥驱动
//******************************************************************
//#if DSP28_EPWM5
void InitEPwm5Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm5Regs.TBPRD = 1000;
EPwm5Regs.TBPHS.all = 0;
EPwm5Regs.TBCTR = 0;
// Setup TBCLK
EPwm5Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm5Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Disable phase loading
EPwm5Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm5Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm5Regs.TBCTL.bit.SWFSYNC = 0;
EPwm5Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.PHSDIR = 1;
EPwm5Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm5Regs.CMPA.half.CMPA = Motor_PERIOD - 5;
EPwm5Regs.CMPB = 5;
// Setup CMPCTL
EPwm5Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm5Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm5Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm5Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm5Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM6A
EPwm5Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm5Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM6B
EPwm5Regs.AQCTLB.bit.CBD = AQ_SET;
// set deadband
// EPwm5Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;// Dead-band Output Mode Control
// EPwm5Regs.DBCTL.bit.POLSEL= DB_ACTV_HI;// Polarity Select Control
// EPwm5Regs.DBCTL.bit.IN_MODE = DBB_ALL;// Dead Band Input Mode Control
// EPwm5Regs.DBFED = 100;//Falling delay
// EPwm5Regs.DBRED = 100;//Raising delay
EPwm5Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm5Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm5Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO;// 10:8Start of conversion A Select
EPwm5Regs.ETSEL.bit.SOCAEN = ET_DISABLE; // 11Start of conversion A Enable
EPwm5Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm5Regs.ETSEL.bit.SOCBEN = ET_DISABLE; // 15Start of conversion B Enable
EPwm5Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm5Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm5Regs.ETPS.bit.SOCAPRD = 0; // 9:8EPWMxSOCA Period Select
EPwm5Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm5Regs.ETPS.bit.SOCBPRD = 0; // 13:12 EPWMxSOCB Period Select
EPwm5Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm6Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM6寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 加热阀控制
//******************************************************************
//#if DSP28_EPWM6//
void InitEPwm6Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm6Regs.TBPRD = 1500;
EPwm6Regs.TBPHS.all = 0;
EPwm6Regs.TBCTR = 0;
EPwm6Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm6Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm6Regs.TBCTL.bit.PHSEN = TB_DISABLE;// Disable phase loading
EPwm6Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm6Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm6Regs.TBCTL.bit.SWFSYNC = 0;
EPwm6Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm6Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm6Regs.TBCTL.bit.PHSDIR = 1;
EPwm6Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm6Regs.CMPA.half.CMPA = 3;
// Setup CMPCTL
EPwm6Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm6Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm6Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm6Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm6Regs.AQCTLA.bit.CAU = AQ_CLEAR; // Set PWM6A
EPwm6Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm6Regs.ETSEL.bit.INTSEL = ET_CTR_PRD; // 2:0EPWMxINTn Select
EPwm6Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm6Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm6Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm6Regs.AQCSFRC.bit.CSFA = 0;
EPwm6Regs.AQCSFRC.bit.CSFB = 0;// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm7Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM7寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改绷浚何?
// 备注 : Slope Compensation PWM Control (Hardware
//******************************************************************
//#if DSP28_EPWM7
void InitEPwm7Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm7Regs.TBPRD = 1000;//3130--10K
EPwm7Regs.TBPHS.all = 0;
EPwm7Regs.TBCTR = 0;
EPwm7Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm7Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm7Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm7Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm7Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm7Regs.TBCTL.bit.SWFSYNC = 0;
EPwm7Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm7Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm7Regs.TBCTL.bit.PHSDIR = 1;
EPwm7Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm7Regs.CMPB = 0;
// Setup CMPCTL
EPwm7Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm7Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm7Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm7Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
// EPwm7Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM7B
// EPwm7Regs.AQCTLB.bit.CBD = AQ_SET;
EPwm7Regs.AQCTLB.bit.ZRO = AQ_SET;
EPwm7Regs.AQCTLB.bit.CBU = AQ_CLEAR;
EPwm7Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm7Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm7Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm7Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
/******************************************************************/
//函数名:void InitTzDriver(void)
//功能:Initialize the TZ Module for epwm1,epwm2,epwm4,epwm5 and epwm6 of WPPM3312Z
//备注:2015.06.25
//===========================================================================
void InitTzDriver(void)
{// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm1 Module
EALLOW;
EPwm1Regs.TZSEL.bit.CBC1 = 1;
//EPwm1Regs.TZSEL.bit.OSHT1 = 1;
//EPwm1Regs.TZSEL.bit.DCBEVT1 = 1;
EPwm1Regs.TZSEL.bit.DCAEVT1 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
EPwm1Regs.TZCTL.bit.DCAEVT1 = 2;
// EPwm1Regs.TZCTL.bit.DCBEVT1= 2;
// EPwm1Regs.TZDCSEL.bit.DCBEVT1 = TZ_DCBH_LOW;
EPwm1Regs.TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI;
// Enable TZ interrupt
// EPwm1Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1\TZ2 and TZ3 as one shot trip sources on EPwm2 Module
// EALLOW;
EPwm2Regs.TZSEL.bit.CBC1 = 1;
//EPwm2Regs.TZSEL.bit.OSHT1 = 1;
// EPwm2Regs.TZSEL.bit.DCBEVT1= 1;
EPwm2Regs.TZSEL.bit.DCAEVT1= 1;
// What do we want the TZ1 and TZ2 to do?
EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.DCAEVT1 = 2;
// EPwm2Regs.TZCTL.bit.DCBEVT1 = 2;
// EPwm2Regs.TZDCSEL.bit.DCBEVT1 = TZ_DCBH_LOW;
EPwm2Regs.TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI;
// Enable TZ interrupt
// EPwm2Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm4 Module
EPwm3Regs.TZSEL.bit.CBC3 = 1;//FAN
EPwm3Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EALLOW;
// EPwm4Regs.TZSEL.bit.CBC1 = 1;
EPwm4Regs.TZSEL.bit.DCAEVT2 = 1;
// EPwm4Regs.TZSEL.bit.DCBEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm4Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm4Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm4Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm4Regs.TZCTL.bit.DCBEVT2 = 2;
// EPwm4Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;
EPwm4Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// Enable TZ interrupt
// EPwm4Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm5 Module
// EALLOW;
// EPwm5Regs.TZSEL.bit.CBC1 = 1;
// EPwm5Regs.TZSEL.bit.CBC2 = 1;
//EPwm5Regs.TZSEL.bit.CBC3 = 1;//FAN
EPwm5Regs.TZSEL.bit.DCAEVT2 = 1;
// EPwm5Regs.TZSEL.bit.DCAEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm5Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm5Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm5Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm5Regs.TZCTL.bit.DCBEVT2 = 2;
EPwm5Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// EPwm5Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// Enable TZ interrupt
// EPwm5Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1\TZ2 and TZ3 as one shot trip sources on EPwm3 Module
// EALLOW;
// EPwm6Regs.TZSEL.bit.CBC1 = 1;
EPwm6Regs.TZSEL.bit.CBC2 = 1;///JRF
// EPwm6Regs.TZSEL.bit.CBC3 = 1;
// EPwm6Regs.TZSEL.bit.DCAEVT2= 1;
// EPwm6Regs.TZSEL.bit.DCBEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm6Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
// EPwm6Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm6Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm6Regs.TZCTL.bit.DCBEVT2 = 2;
// EPwm6Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;
// EPwm6Regs.TZDCSEL.bit.DCAEVT2= TZ_DCAH_HI;
// EPwm7Regs.TZSEL.bit.CBC2 = 1;//JRF
// EPwm7Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
// Enable TZ interrupt
// EPwm6Regs.TZEINT.bit.OST = 1;
EDIS;
}
/***********************************************************/
//函数名:void InitDCEventDriver
//功能:Initialize Digtal Compare Event Module
//备注:DC Event for protecting Power and Motor
//===========================================================================
void InitDCEventDriver(void)
{
// Define an event (DCAEVT1) based on TZ1 and TZ2
EALLOW;
EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 1 output and TZ1 input
// EPwm1Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_TZ1 ;
EPwm1Regs.DCACTL.bit.EVT1SRCSEL = DC_EVT1;// DCAEVT1 = DCAEVT1(not filtered)
EPwm1Regs.DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC;
EPwm2Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 1 output AND TZ1 input
// EPwm2Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_TZ1;
EPwm2Regs.DCACTL.bit.EVT1SRCSEL = DC_EVT1;// DCAEVT1 = DCAEVT1 (not filtered)
EPwm2Regs.DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC;
EPwm4Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT;// DCAH = Comparator 2 output
EPwm4Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (not filtered)
EPwm4Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async path
EPwm5Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT;// DCAH = Comparator 2 output
EPwm5Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2= DCAEVT2 (not filtered)
EPwm5Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async path
EDIS;
}
//===========================================================================
// End of file.
//===========================================================================
----------------------以上为DSP2803x_EPwm.c-----------------------------------------------------------
ke ma:
回复 Jordan Zhou:
能抓取到DACVAL的值。它是PI计算出来的值,一个PWM周期更新一次。我设置了EPwm1Regs.TZSEL.bit.CBC1=1;期望得到的是一个PWM周期只斩一次波。
在使用TMS320f28034这款芯片的单周期斩波功能,遇到了一些问题如下:
ePWM的频率设置为20kHZ;ePWM1,ePWM2,ePWM3同步;ePWM1A和ePWM2A驱动全桥,控制逆变电源(ePWM1B和ePWM2B不使用);ePWM3A和ePWM3B用来做斜波补偿,和电流反馈信号一起从Comp1的一个端口进入,Comp1的另一个端口为软件计算的值写入DACVAL,对ePWM1A,ePWM2A进行斩波。现在发现在一个ePWM周期内出现多次斩波的现象。见附件。
下图通道1为全桥驱动;通道2为ePWM1A(最大占空比设置为50%);通道3为ePWM2A(最大占空比设置为50%);通道4为ePWM3A(占空比设置为50%)和ePWM3B(占空比设置为50%)+反馈电流;a b之间为一个周期。
//###########################################################################
//
// FILE:DSP2803x_Comp.c
//
// TITLE:DSP2803x Comparator Initialization & Support Functions.
//
//###########################################################################
// $TI Release: F2803x C/C++ Header Files and Peripheral Examples V127 $
// $Release Date: March 30, 2013 $
//###########################################################################
#include "DSP2803x_Device.h"// DSP2803x Headerfile Include File
#include "DSP2803x_Examples.h"// DSP2803x Examples Include File
void InitCompDriver(void);
void InitCompGpio(void);
void InitComp(void);
void InitComp(void)
{
InitCompGpio();
InitCompDriver();
}
void InitCompGpio()
{InitComp1Gpio();
}
void InitComp1Gpio()
{EALLOW;GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1;// Disable pull-up for GPIO1 (CMP1OUT)GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 3;// Configure GPIO1 for CMP1OUT operationGpioCtrlRegs.AIOMUX1.bit.AIO2 = 2;// Configure AIO2 for CMP1A (analog input) operationSysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;//EDIS;
}
#if DSP28_COMP2
void InitComp2Gpio()
{EALLOW;GpioCtrlRegs.AIOMUX1.bit.AIO4 = 2;// Configure AIO4 for CMP2A (analog input) operationEDIS;
}
#endif //end DSP28_COMP2
#if DSP28_COMP3
void InitComp3Gpio()
{EALLOW;GpioCtrlRegs.AIOMUX1.bit.AIO6 = 2;// Configure AIO6 for CMP3A (analog input) operationEDIS;
}
#endif //end DSP28_COMP3
/**********************************************************************************/
//函数名:void IntiCompDriver(void);
//功能:比较器模块初始化
//备注:
/*********************************************************************************/
void InitCompDriver()
{EALLOW;SysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;// Enable clock to the Comparator 1 blockComp1Regs.DACVAL.bit.DACVAL = 300;//C_CTCurr_Pro;Comp1Regs.COMPCTL.bit.COMPDACEN = 1;// Power up Comparator 1 locallyComp1Regs.COMPCTL.bit.COMPSOURCE = 0;Comp1Regs.COMPCTL.bit.CMPINV = 0;Comp1Regs.COMPCTL.bit.QUALSEL = 6;Comp1Regs.COMPCTL.bit.SYNCSEL =1;EDIS;
}
//===========================================================================
// End of file.
//===========================================================================
-----------------------------------以上为DSP2803x_Comp.c----------------------------------------------------------------
//**************************************************************************
// Copyright(c)2017-DR_Welding
// 文件名称 : WPCM2315CU2_Isr.c
// 作者 :
// 模块功能 :系统中断
// 局部函数列表: 无
// 更改记录 :
// 日期 DR版本 作者 备注
//
//**************************************************************************
#define in_interrupt
#include "DSP2803x_Header.h"// Headerfile Include File
#include "WPPM3312M2_Isr.h"
#include "WPPM3312M2_SysReg.h"
#include "WPPM3312M2_SysMacro.h"
#include "WPPM3312M2_GlobalVarDef.h"
#include "WPPM3312M2_EepromDriver.h"
#include "WPPM3312M2_Can.h"
#include "WPPM3312M2_Struct.h"
//#include"WPPM3312M2_LedShow.h"
#include"WPPM3312M2_KeyDispose.h"
//============================
// 内部函数声明
//============================
void vPwm1IntIsr(void);
void vTimer0IntIsr(void);
void IsrVarInit(void);
//******************************************************************
// 函数名 :void InitInterrupt(void)
// 作者 :
// 功能 :中断模块初始化
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitInterrupt(void)
{EALLOW;
// 定义PWM1的中断向量PieVectTable.EPWM1_INT = &vPwm1IntIsr;PieCtrlRegs.PIEIER3.bit.INTx1 = 1;IER |= M_INT3;EDIS;
}
//******************************************************************
// 函数名 :void vPwm1IntIsr(void)
// 作者 :
// 功能 :主拓扑PWM中断
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
interrupt void vPwm1IntIsr(void)
{
//========= 更新主功率移相角=========mEnablePowerPwm();
mSetPwm1Duty(1500);
PidLogic();//PI处理
//======================== 清中断标志并再次使能中断 ===========================
EPwm1Regs.ETCLR.bit.INT = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
/****************************************************************************/
//函数名:void PidUpGrading(int PidResult);
// 作者 :MaKe
//功能:比较器模块更新PID计算结果
// 参数 :PidResult :PID计算结果
// 祷?:无
// 调用全局变量:无
// 修改全局变量:无
//备注:2018.06.29
/************************************************************************/
void PidUpGrading(int PidResult)
{EALLOW;Comp1Regs.DACVAL.bit.DACVAL = PidResult; //C_CTCurr_Pro;//原边过流保护点EDIS;
}
------------------------------以上为WPCM2315CU2_Isr.c------------------------------------------------------------------------------//**************************************************************************
// ***
// 文件名称 : DSP2803x_EPwm.c
// 作者 :
// 模块功能 :DSP2803x EPwm Initialization & Support Functions.
// 局部函数列表: 无
// 版本信息 : TI File $Revision: /main/3 $
// Checkin $Date: November 10, 200914:05:11 $
// $TI Release: 2803x C/C++ Header Files V1.21 $
// $Release Date: December 1, 2009 $
// 更改记录 :
//**************************************************************************
#include "DSP2803x_Header.h"// Headerfile Include File
#include "WPPM3312M2_SysMacro.h"
#include "WPPM3312M2_SysReg.h"
#include "DSP2803x_Device.h"
//============================
// 内部函数声明
//============================
void InitEPwmGpio(void);
void InitEPwm1Gpio(void);
void InitEPwm2Gpio(void);
void InitEPwm3Gpio(void);
void InitEPwm4Gpio(void);
void InitEPwm5Gpio(void);
void InitEPwm6Gpio(void);
void InitEPwm7Gpio(void);
void InitEPwmDriver(void);
void InitEPwm1Driver(void);
void InitEPwm2Driver(void);
void InitEPwm3Driver(void);
void InitEPwm4Driver(void);
void InitEPwm5Driver(void);
void InitEPwm6Driver(void);
void InitEPwm7Driver(void);
void InitTzGpio(void);
void InitTzDriver(void);
void InitDCEventDriver(void);
//******************************************************************
// 函数名 :void InitEPwm(void)
// 作者 :TI
// 功能 :初始化系统PWM模块及管脚设置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitEPwm(void)
{
// 配置管脚功能
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
InitEPwmGpio();
// InitTzGpio();
// 初始化寄存器
// InitTzDriver();
// InitDCEventDriver();
InitEPwmDriver();
//mUpDatePwm2Phase(0);
mUpDatePwm2Phase(1500);
//mSetPwm4BDuty(0);
mDisablePowerPwm();
mDisableMotorPWM();
mEnableMotorPWM();//////使能PWM3
// mDisableJRFPWM();
// mDisableFANPWM();
// mDebugPWM(1000);
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
}
//******************************************************************
// 函数名 :void InitEPwmDriver(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as EPwm pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//******************************************************************
void InitEPwmGpio(void)
{
#if DSP28_EPWM1InitEPwm1Gpio();
#endif // endif DSP28_EPWM1
#if DSP28_EPWM2InitEPwm2Gpio();
#endif // endif DSP28_EPWM2
#if DSP28_EPWM3InitEPwm3Gpio();
#endif // endif DSP28_EPWM3
#if DSP28_EPWM4// InitEPwm4Gpio();
#endif // endif DSP28_EPWM4
#if DSP28_EPWM5//InitEPwm5Gpio();
#endif // endif DSP28_EPWM5
#if DSP28_EPWM6//InitEPwm6Gpio();
#endif // endif DSP28_EPWM6
#if DSP28_EPWM7//InitEPwm7Gpio();
#endif // endif DSP28_EPWM7
}
//******************************************************************
// 函数名 :void InitEPwm1Gpio(void)
// 作者 :TI
// 功能 :初始化PWM1输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM1
void InitEPwm1Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO0 = 1;// Disable pull-up on GPIO0 (EPWM1A)
GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1;// Disable pull-up on GPIO1 (EPWM1B)
/* Configure EPWM-1 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM1 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 1;// Configure GPIO0 as EPWM1A
GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 1;// Configure GPIO1 as EPWM1B
EDIS;
}
#endif // endif DSP28_EPWM1
//******************************************************************
// 函数名 :void InitEPwm2Gpio(void)
// 作者 :TI
// 功能 :初始化PWM2输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM2
void InitEPwm2Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1;// Disable pull-up on GPIO2 (EPWM2A)
GpioCtrlRegs.GPAPUD.bit.GPIO3 = 1;// Disable pull-up on GPIO3 (EPWM2B)
/* Configure EPwm-2 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM2 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO2 = 1;// Configure GPIO2 as EPWM2A
GpioCtrlRegs.GPAMUX1.bit.GPIO3 = 1;// Configure GPIO3 as EPWM2B
EDIS;
}
//#endif // endif DSP28_EPWM2
//******************************************************************
// 函数名 :void InitEPwm3Gpio(void)
// 作者 :TI
// 功能 :初始化PWM3输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM3
void InitEPwm3Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.GpioCtrlRegs.GPAPUD.bit.GPIO4 = 1;// Disable pull-up on GPIO4 (EPWM3A)
GpioCtrlRegs.GPAPUD.bit.GPIO5 = 1;// Disable pull-up on GPIO5 (EPWM3B)
/* Configure EPwm-3 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM3 functional pins.
// Comment out other unwanted lines.GpioCtrlRegs.GPAMUX1.bit.GPIO4 = 1;// Configure GPIO4 as EPWM3A
GpioCtrlRegs.GPAMUX1.bit.GPIO5 = 1;// Configure GPIO5 as EPWM3B
EDIS;
}
//#endif // endif DSP28_EPWM3
//******************************************************************
// 函数名 :void InitEPwm4Gpio(void)
// 作者 :TI
// 功能 :初始化PWM4输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM4
void InitEPwm4Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1;// Disable pull-up on GPIO6 (EPWM4A)
GpioCtrlRegs.GPAPUD.bit.GPIO7 = 1;// Disable pull-up on GPIO7 (EPWM4B)
/* Configure EPWM-4 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM4 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 1;// Configure GPIO6 as EPWM4A
GpioCtrlRegs.GPAMUX1.bit.GPIO7 = 1;// Configure GPIO7 as EPWM4B
EDIS;
}
//#endif // endif DSP28_EPWM4
//******************************************************************
// 函数名 :void InitEPwm5Gpio(void)
// 作者 :
// 功能 :初始化PWM5输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :EPWM5模块只用到了GPIO9,故只初始化此管脚
//******************************************************************
//#if DSP28_EPWM5
void InitEPwm5Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO8 = 1;// Disable pull-up on GPIO8 (EPWM5A)
GpioCtrlRegs.GPAPUD.bit.GPIO9 = 1;// Disable pull-up on GPIO9 (EPWM5B)
/* Configure EPWM-5 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM5 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO8 = 1;// Configure GPIO8 as EPWM5A
GpioCtrlRegs.GPAMUX1.bit.GPIO9 = 1;// Configure GPIO9 as EPWM5B
EDIS;
}
//#endif // endif DSP28_EPWM5
//******************************************************************
// 函数名 :void InitEPwm6Gpio(void)
// 作者 :TI
// 功能 :初始化PWM6输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM6
void InitEPwm6Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO10 = 1;// Disable pull-up on GPIO10 (EPWM6A)//GpioCtrlRegs.GPAPUD.bit.GPIO11 = 1;// Disable pull-up on GPIO11 (EPWM6B)
/* Configure EPWM-6 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM6 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO10 = 1;// Configure GPIO10 as EPWM6A//GpioCtrlRegs.GPAMUX1.bit.GPIO11 = 1;// Configure GPIO11 as EPWM6B
EDIS;
}
//#endif // endif DSP28_EPWM6
//******************************************************************
// 函数名 :void InitEPwm7Gpio(void)
// 作者 :TI
// 功能 :初始化PWM7输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM7
void InitEPwm7Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.//GpioCtrlRegs.GPBPUD.bit.GPIO40 = 1;// Disable pull-up on GPIO40 (EPWM7A)
GpioCtrlRegs.GPBPUD.bit.GPIO41 = 1;// Disable pull-up on GPIO41 (EPWM7B)
/* Configure EPWM-7 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM7 functional pins.
// Comment out other unwanted lines.// GpioCtrlRegs.GPBMUX1.bit.GPIO40 = 1;// Configure GPIO40 as EPWM7A
GpioCtrlRegs.GPBMUX1.bit.GPIO41 = 1;// Configure GPIO41 as EPWM7B
EDIS;
}
//#endif // endif DSP28_EPWM7
//******************************************************************
// 函数名 :void InitEPwmSyncGpio(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as EPwm Synch pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitEPwmSyncGpio(void)
{
//EALLOW;
/* Configure EPWMSYNCI */
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO6 = 0;// Enable pull-up on GPIO6 (EPWMSYNCI)
GpioCtrlRegs.GPBPUD.bit.GPIO32 = 0;// Enable pull-up on GPIO32 (EPWMSYNCI)
/* Set qualification for selected pins to asynch only */
// This will select synch to SYSCLKOUT for the selected pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAQSEL1.bit.GPIO6 = 0;// Synch to SYSCLKOUT GPIO6 (EPWMSYNCI)
GpioCtrlRegs.GPBQSEL1.bit.GPIO32 = 0; // Synch to SYSCLKOUT GPIO32 (EPWMSYNCI)
/* Configure EPwmSync pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPwmSync functional pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 2;// Configures GPIO6 for EPWMSYNCI operation
GpioCtrlRegs.GPBMUX1.bit.GPIO32 = 2;// Configures GPIO32 for EPWMSYNCI operation.
/* Configure EPWMSYNC0 */
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1;// Disable pull-up on GPIO6 (EPWMSYNCO)
GpioCtrlRegs.GPBPUD.bit.GPIO33 = 1;// Disable pull-up on GPIO33 (EPWMSYNCO)
// GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 3;// Configures GPIO6 for EPWMSYNCO
GpioCtrlRegs.GPBMUX1.bit.GPIO33 = 2; // Configures GPIO33 for EPWMSYNCO
}
//******************************************************************
// 函数名 :void InitTzGpio(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as Trip Zone (TZ) pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//******************************************************************
void InitTzGpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO12 = 0;// Enable pull-up on GPIO12 (TZ1)
// GpioCtrlRegs.GPAPUD.bit.GPIO15 = 0;// Enable pull-up on GPIO15 (TZ1)
GpioCtrlRegs.GPAPUD.bit.GPIO13 = 0;// Enable pull-up on GPIO13 (TZ2)
// GpioCtrlRegs.GPAPUD.bit.GPIO16 = 0;// Enable pull-up on GPIO16 (TZ2)
// GpioCtrlRegs.GPAPUD.bit.GPIO28 = 0;// Enable pull-up on GPIO28 (TZ2)
GpioCtrlRegs.GPAPUD.bit.GPIO14 = 0;// Enable pull-up on GPIO14 (TZ3)
// GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0;// Enable pull-up on GPIO17 (TZ3)
// GpioCtrlRegs.GPAPUD.bit.GPIO29 = 0;// Enable pull-up on GPIO29 (TZ3)
/* Set qualification for selected pins to asynch only */
// Inputs are synchronized to SYSCLKOUT by default.
// This will select asynch (no qualification) for the selected pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAQSEL1.bit.GPIO12 = 3; // Asynch input GPIO12 (TZ1)
// GpioCtrlRegs.GPAQSEL1.bit.GPIO15 = 3; // Asynch input GPIO15 (TZ1)
GpioCtrlRegs.GPAQSEL1.bit.GPIO13 = 3; // Asynch input GPIO13 (TZ2)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO16 = 3; // Asynch input GPIO16 (TZ2)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO28 = 3; // Asynch input GPIO28 (TZ2)
GpioCtrlRegs.GPAQSEL1.bit.GPIO14 = 3; // Asynch input GPIO14 (TZ3)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO17 = 3; // Asynch input GPIO17 (TZ3)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO29 = 3; // Asynch input GPIO29 (TZ3)
/* Configure TZ pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be TZ functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO12 = 1; // Configure GPIO12 as TZ1
//GpioCtrlRegs.GPAMUX1.bit.GPIO15 = 1; // Configure GPIO15 as TZ1
GpioCtrlRegs.GPAMUX1.bit.GPIO13 = 1; // Configure GPIO13 as TZ2
// GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 3; // Configure GPIO16 as TZ2
// GpioCtrlRegs.GPAMUX2.bit.GPIO28 = 3; // Configure GPIO28 as TZ2
GpioCtrlRegs.GPAMUX1.bit.GPIO14 = 1; // Configure GPIO14 as TZ3
// GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 3; // Configure GPIO17 as TZ3
// GpioCtrlRegs.GPAMUX2.bit.GPIO29 = 3; // Configure GPIO29 as TZ3
EDIS;
}
//******************************************************************
// 函数名 :void InitEPwmDriver(void)
// 作者 篢I
// 功能 :初始低砅WM模块寄存髋渲?
// 参数 :无
// :无
// 调用全局变量?
//
// 备注
//******************************************************************
void InitEPwmDriver(void)
{
//#if DSP28_EPWM1InitEPwm1Driver();
//#endif
//#if DSP28_EPWM2
InitEPwm2Driver();
//#endif
//#if DSP28_EPWM3
InitEPwm3Driver();
//#endif
//#if DSP28_EPWM4
//InitEPwm4Driver();
//#endif
//#if DSP28_EPWM5
//InitEPwm5Driver();
//#endif
//#if DSP28_EPWM6
// InitEPwm6Driver();
//#endif
#if DSP28_EPWM7
// InitEPwm7Driver();
#endif
}
//******************************************************************
// 函数名 :void InitEPwm1Driver(void)
// 作者 :TI
// 功 :初始化系统ePWM1寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM1
void InitEPwm1Driver(void)
{
EALLOW;
EPwm1Regs.TBPRD = 3000;////PFSB_PERIOD,1250-48K
//EPwm1Regs.TBPRD = 1500;////PFSB_PERIOD,1250-48K
EPwm1Regs.TBPHS.all = 0;
EPwm1Regs.TBCTR = 0;
// Setup TBCLK
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
//EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW; //
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;//Count equal to zero; have a syn output
EPwm1Regs.TBCTL.bit.SWFSYNC = 0;
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; //
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm1Regs.TBCTL.bit.PHSDIR = 1;
EPwm1Regs.TBCTL.bit.FREE_SOFT = 3; //
// Setup compare
EPwm1Regs.CMPA.half.CMPA= 1500;
EPwm1Regs.CMPB = 1500;
EPwm1Regs.TBPHS.half.TBPHS = 0;
// Setup CMPCTL
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET;/////
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.ZRO = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CBU = AQ_SET;
//EPwm1Regs.AQSFRC.bit.RLDCSF = 0;
//Set DeadBand
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;//
EPwm1Regs.DBCTL.bit.IN_MODE = 0x0;
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm1Regs.DBFED = 200;//
//EPwm1Regs.DBRED = 200;//
EPwm1Regs.DBFED = 300;//
EPwm1Regs.DBRED = 300;//
//EPwm1Regs.DBCTL.bit.HALFCYCLE = 1;
// // Set ETSEL
EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // 2:0EPWMxINTn Select
EPwm1Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm1Regs.ETSEL.bit.SOCASEL = ET_CTRU_CMPA; // 10:8Start of conversion A Select
EPwm1Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm1Regs.ETSEL.bit.SOCBSEL = ET_CTRU_CMPB; // 14:12 Start of conversion B Select
EPwm1Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm1Regs.ETPS.bit.INTPRD = ET_1ST; // 1:0EPWMxINTn Period Select
EPwm1Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm1Regs.ETPS.bit.SOCAPRD = ET_1ST; // 9:8EPWMxSOCA Period Select
EPwm1Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm1Regs.ETPS.bit.SOCBPRD = 1; // 13:12 EPWMxSOCB Period Select
EPwm1Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
///////////////////////////////////////////////////////EPwm1Regs.TZSEL.bit.DCAEVT2 = 1;//////EPwm1Regs.TZSEL.bit.DCAEVT2 = 0;//////EPwm1Regs.TZSEL.bit.DCBEVT2 = 0;//////EPwm1Regs.TZSEL.bit.DCBEVT2 = 1;EPwm1Regs.TZSEL.bit.CBC1=1;
// What do we want the TZ1 and TZ2 to doEPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO;EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO;//EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCBH_LOW; //TZ_DCAH_HI;//EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_LOW;EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI;EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_HI;EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 2 output
EDIS;
}
#endif
//******************************************************************
// 函数名 :void InitEPwm2Driver(void)
// 作者 :TI
// 功能 初始化系统ePWM2寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM2
void InitEPwm2Driver(void)
{ EALLOW;
//SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
//EPwm2Regs.TBPRD = 1874;///48k
EPwm2Regs.TBPRD = 3000;///20k// Count up
//EPwm2Regs.TBPRD = 1500;///20k//Count updown
EPwm2Regs.TBPHS.all = 0;
EPwm2Regs.TBCTR = 0;
// Setup TBCLK
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
//EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;//Count updown
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Enable phase loading
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm2Regs.TBCTL.bit.SWFSYNC = 0;
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.PHSDIR = 1;
EPwm2Regs.TBCTL.bit.FREE_SOFT = 3; //
// Setup compare
EPwm2Regs.CMPA.half.CMPA= 1500;//
EPwm2Regs.CMPB= 1500;//
EPwm2Regs.TBPHS.half.TBPHS = 0;
// Setup CMPCTL
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm2Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.ZRO = AQ_CLEAR ;
EPwm2Regs.AQCTLB.bit.CBU = AQ_SET;
// EPwm2Regs.AQSFRC.bit.RLDCSF = 3;
//Set DeadBand
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;
EPwm2Regs.DBCTL.bit.IN_MODE = 0x0;
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm2Regs.DBFED = 200 ;//
//EPwm2Regs.DBRED = 200;
EPwm2Regs.DBFED = 300;//
EPwm2Regs.DBRED = 300;
////斩波比较模块
//EPwm2Regs.TZSEL.bit.DCAEVT2 = 1;
//EPwm2Regs.TZSEL.bit.DCAEVT2 = 0;
//EPwm2Regs.TZSEL.bit.DCBEVT2 = 0;
//EPwm2Regs.TZSEL.bit.DCBEVT2 = 1;
EPwm2Regs.TZSEL.bit.CBC1=1;// What do we want the TZ1 and TZ2 to do?EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;//EPwm2Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCBH_LOW;//EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;EPwm2Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI;EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_HI;EPwm2Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT; // DCAH = Comparator 2 outputEPwm2Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (not filtered)EPwm2Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async pathEPwm2Regs.TZEINT.bit.DCBEVT2=0;//??
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
#endif
//******************************************************************
// 函数名 :void InitEPwm3Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM3寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM3
void InitEPwm3Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
//EPwm3Regs.TBPRD = Motor_PERIOD;
EPwm3Regs.TBPRD = 3000;//1500;//C_MOTOR_PWM_PRD;
EPwm3Regs.TBPHS.all = 0;
EPwm3Regs.TBCTR = 0;
EPwm3Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
//EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // 对称波形输出
EPwm3Regs.TBCTL.bit.PHSEN = TB_DISABLE;// Disable phase loading
EPwm3Regs.TBCTL.bit.PRDLD = TB_SHADOW;
//EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // Count equal to zero; have a syn output
EPwm3Regs.TBCTL.bit.SWFSYNC = 0;
//EPwm3Regs.TBCTL.bit.HSPCLKDIV = 0x04;///1/8
EPwm3Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
// EPwm3Regs.TBCTL.bit.CLKDIV = 0x04;///1/16
EPwm3Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm3Regs.TBCTL.bit.PHSDIR = 1;
EPwm3Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compareEPwm3Regs.CMPA.half.CMPA =1500;
EPwm3Regs.CMPB = 0;
// Setup CMPCTL
EPwm3Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm3Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm3Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm3Regs.AQCTLA.bit.CAU = AQ_CLEAR; //
EPwm3Regs.AQCTLA.bit.PRD = AQ_SET; //
EPwm3Regs.AQCTLB.bit.CBU = AQ_SET; //
EPwm3Regs.AQCTLB.bit.PRD = AQ_CLEAR; //
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTR_PRD; // 2:0EPWMxINTn Select
EPwm3Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
/////////////////////////////////////////////////////
//死区模块(DB)配置
EPwm3Regs.DBCTL.bit.OUT_MODE =DB_FULL_ENABLE;
EPwm3Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
EPwm3Regs.DBCTL.bit.IN_MODE = 0;
//EPwm3Regs.DBCTL.bit.HALFCYCLE = 0;
EPwm3Regs.DBFED = 200;//Falling delay
EPwm3Regs.DBRED = 200; //Raising delay //0.01667*300=5U
// 事件触发模块(EZ)配置
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPA; // 2:0EPWMxINTn Select
EPwm3Regs.ETSEL.bit.INTEN = ET_DISABLE; // 3EPWMxINTn Enable
EPwm3Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // 10:8Start of conversion A Select
EPwm3Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm3Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm3Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm3Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm3Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm3Regs.ETPS.bit.SOCAPRD = 1; // 9:8EPWMxSOCA Period Select
EPwm3Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm3Regs.ETPS.bit.SOCBPRD = 1; // 13:12 EPWMxSOCB Period Select
EPwm3Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm4Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM4寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 送丝机H桥驱动
//******************************************************************
//#if DSP28_EPWM4
void InitEPwm4Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm4Regs.TBPRD = 1000;
EPwm4Regs.TBPHS.all = 0;
EPwm4Regs.TBCTR = 0;
EPwm4Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm4Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up and down
EPwm4Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm4Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm4Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;
EPwm4Regs.TBCTL.bit.SWFSYNC = 0;
EPwm4Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.PHSDIR = 1;
EPwm4Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm4Regs.CMPA.half.CMPA = Motor_PERIOD - 5;
EPwm4Regs.CMPB = 5;
// Setup CMPCTL
EPwm4Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm4Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm4Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm4Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm4Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM4A
EPwm4Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm4Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM4B
EPwm4Regs.AQCTLB.bit.CBD = AQ_SET;
// EPwm4Regs.AQSFRC.bit.RLDCSF = 3;
// Set deadband
// EPwm4Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;// Dead-band Output Mode Control
// EPwm4Regs.DBCTL.bit.POLSEL= DB_ACTV_HI;// Polarity Select Control
// EPwm4Regs.DBCTL.bit.IN_MODE = DBB_ALL;// Dead Band Input Mode Control
// EPwm4Regs.DBFED = 100;//Falling delay
// EPwm4Regs.DBRED = 100;//Raising delay
// Set ETSEL
EPwm4Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm4Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm4Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // 10:8Start of conversion A Select
EPwm4Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm4Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm4Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm4Regs.ETPS.bit.INTPRD = ET_1ST; // 1:0EPWMxINTn Period Select
EPwm4Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm4Regs.ETPS.bit.SOCAPRD = ET_1ST; // 9:8EPWMxSOCA Period Select
EPwm4Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm4Regs.ETPS.bit.SOCBPRD = ET_1ST; // 13:12 EPWMxSOCB Period Select
EPwm4Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm5Driver(void)
// 作者 :何志军
// 功能 :初始化系统ePWM5寄存髋渲?
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 送丝机H桥驱动
//******************************************************************
//#if DSP28_EPWM5
void InitEPwm5Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm5Regs.TBPRD = 1000;
EPwm5Regs.TBPHS.all = 0;
EPwm5Regs.TBCTR = 0;
// Setup TBCLK
EPwm5Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm5Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Disable phase loading
EPwm5Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm5Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm5Regs.TBCTL.bit.SWFSYNC = 0;
EPwm5Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.PHSDIR = 1;
EPwm5Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm5Regs.CMPA.half.CMPA = Motor_PERIOD - 5;
EPwm5Regs.CMPB = 5;
// Setup CMPCTL
EPwm5Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm5Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm5Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm5Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm5Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM6A
EPwm5Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm5Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM6B
EPwm5Regs.AQCTLB.bit.CBD = AQ_SET;
// set deadband
// EPwm5Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;// Dead-band Output Mode Control
// EPwm5Regs.DBCTL.bit.POLSEL= DB_ACTV_HI;// Polarity Select Control
// EPwm5Regs.DBCTL.bit.IN_MODE = DBB_ALL;// Dead Band Input Mode Control
// EPwm5Regs.DBFED = 100;//Falling delay
// EPwm5Regs.DBRED = 100;//Raising delay
EPwm5Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm5Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm5Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO;// 10:8Start of conversion A Select
EPwm5Regs.ETSEL.bit.SOCAEN = ET_DISABLE; // 11Start of conversion A Enable
EPwm5Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm5Regs.ETSEL.bit.SOCBEN = ET_DISABLE; // 15Start of conversion B Enable
EPwm5Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm5Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm5Regs.ETPS.bit.SOCAPRD = 0; // 9:8EPWMxSOCA Period Select
EPwm5Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm5Regs.ETPS.bit.SOCBPRD = 0; // 13:12 EPWMxSOCB Period Select
EPwm5Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm6Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM6寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 加热阀控制
//******************************************************************
//#if DSP28_EPWM6//
void InitEPwm6Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm6Regs.TBPRD = 1500;
EPwm6Regs.TBPHS.all = 0;
EPwm6Regs.TBCTR = 0;
EPwm6Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm6Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm6Regs.TBCTL.bit.PHSEN = TB_DISABLE;// Disable phase loading
EPwm6Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm6Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm6Regs.TBCTL.bit.SWFSYNC = 0;
EPwm6Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm6Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm6Regs.TBCTL.bit.PHSDIR = 1;
EPwm6Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm6Regs.CMPA.half.CMPA = 3;
// Setup CMPCTL
EPwm6Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm6Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm6Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm6Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm6Regs.AQCTLA.bit.CAU = AQ_CLEAR; // Set PWM6A
EPwm6Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm6Regs.ETSEL.bit.INTSEL = ET_CTR_PRD; // 2:0EPWMxINTn Select
EPwm6Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm6Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm6Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm6Regs.AQCSFRC.bit.CSFA = 0;
EPwm6Regs.AQCSFRC.bit.CSFB = 0;// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm7Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM7寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改绷浚何?
// 备注 : Slope Compensation PWM Control (Hardware
//******************************************************************
//#if DSP28_EPWM7
void InitEPwm7Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm7Regs.TBPRD = 1000;//3130--10K
EPwm7Regs.TBPHS.all = 0;
EPwm7Regs.TBCTR = 0;
EPwm7Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm7Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm7Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm7Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm7Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm7Regs.TBCTL.bit.SWFSYNC = 0;
EPwm7Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm7Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm7Regs.TBCTL.bit.PHSDIR = 1;
EPwm7Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm7Regs.CMPB = 0;
// Setup CMPCTL
EPwm7Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm7Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm7Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm7Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
// EPwm7Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM7B
// EPwm7Regs.AQCTLB.bit.CBD = AQ_SET;
EPwm7Regs.AQCTLB.bit.ZRO = AQ_SET;
EPwm7Regs.AQCTLB.bit.CBU = AQ_CLEAR;
EPwm7Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm7Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm7Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm7Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
/******************************************************************/
//函数名:void InitTzDriver(void)
//功能:Initialize the TZ Module for epwm1,epwm2,epwm4,epwm5 and epwm6 of WPPM3312Z
//备注:2015.06.25
//===========================================================================
void InitTzDriver(void)
{// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm1 Module
EALLOW;
EPwm1Regs.TZSEL.bit.CBC1 = 1;
//EPwm1Regs.TZSEL.bit.OSHT1 = 1;
//EPwm1Regs.TZSEL.bit.DCBEVT1 = 1;
EPwm1Regs.TZSEL.bit.DCAEVT1 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
EPwm1Regs.TZCTL.bit.DCAEVT1 = 2;
// EPwm1Regs.TZCTL.bit.DCBEVT1= 2;
// EPwm1Regs.TZDCSEL.bit.DCBEVT1 = TZ_DCBH_LOW;
EPwm1Regs.TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI;
// Enable TZ interrupt
// EPwm1Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1\TZ2 and TZ3 as one shot trip sources on EPwm2 Module
// EALLOW;
EPwm2Regs.TZSEL.bit.CBC1 = 1;
//EPwm2Regs.TZSEL.bit.OSHT1 = 1;
// EPwm2Regs.TZSEL.bit.DCBEVT1= 1;
EPwm2Regs.TZSEL.bit.DCAEVT1= 1;
// What do we want the TZ1 and TZ2 to do?
EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.DCAEVT1 = 2;
// EPwm2Regs.TZCTL.bit.DCBEVT1 = 2;
// EPwm2Regs.TZDCSEL.bit.DCBEVT1 = TZ_DCBH_LOW;
EPwm2Regs.TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI;
// Enable TZ interrupt
// EPwm2Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm4 Module
EPwm3Regs.TZSEL.bit.CBC3 = 1;//FAN
EPwm3Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EALLOW;
// EPwm4Regs.TZSEL.bit.CBC1 = 1;
EPwm4Regs.TZSEL.bit.DCAEVT2 = 1;
// EPwm4Regs.TZSEL.bit.DCBEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm4Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm4Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm4Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm4Regs.TZCTL.bit.DCBEVT2 = 2;
// EPwm4Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;
EPwm4Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// Enable TZ interrupt
// EPwm4Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm5 Module
// EALLOW;
// EPwm5Regs.TZSEL.bit.CBC1 = 1;
// EPwm5Regs.TZSEL.bit.CBC2 = 1;
//EPwm5Regs.TZSEL.bit.CBC3 = 1;//FAN
EPwm5Regs.TZSEL.bit.DCAEVT2 = 1;
// EPwm5Regs.TZSEL.bit.DCAEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm5Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm5Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm5Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm5Regs.TZCTL.bit.DCBEVT2 = 2;
EPwm5Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// EPwm5Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// Enable TZ interrupt
// EPwm5Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1\TZ2 and TZ3 as one shot trip sources on EPwm3 Module
// EALLOW;
// EPwm6Regs.TZSEL.bit.CBC1 = 1;
EPwm6Regs.TZSEL.bit.CBC2 = 1;///JRF
// EPwm6Regs.TZSEL.bit.CBC3 = 1;
// EPwm6Regs.TZSEL.bit.DCAEVT2= 1;
// EPwm6Regs.TZSEL.bit.DCBEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm6Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
// EPwm6Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm6Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm6Regs.TZCTL.bit.DCBEVT2 = 2;
// EPwm6Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;
// EPwm6Regs.TZDCSEL.bit.DCAEVT2= TZ_DCAH_HI;
// EPwm7Regs.TZSEL.bit.CBC2 = 1;//JRF
// EPwm7Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
// Enable TZ interrupt
// EPwm6Regs.TZEINT.bit.OST = 1;
EDIS;
}
/***********************************************************/
//函数名:void InitDCEventDriver
//功能:Initialize Digtal Compare Event Module
//备注:DC Event for protecting Power and Motor
//===========================================================================
void InitDCEventDriver(void)
{
// Define an event (DCAEVT1) based on TZ1 and TZ2
EALLOW;
EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 1 output and TZ1 input
// EPwm1Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_TZ1 ;
EPwm1Regs.DCACTL.bit.EVT1SRCSEL = DC_EVT1;// DCAEVT1 = DCAEVT1(not filtered)
EPwm1Regs.DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC;
EPwm2Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 1 output AND TZ1 input
// EPwm2Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_TZ1;
EPwm2Regs.DCACTL.bit.EVT1SRCSEL = DC_EVT1;// DCAEVT1 = DCAEVT1 (not filtered)
EPwm2Regs.DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC;
EPwm4Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT;// DCAH = Comparator 2 output
EPwm4Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (not filtered)
EPwm4Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async path
EPwm5Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT;// DCAH = Comparator 2 output
EPwm5Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2= DCAEVT2 (not filtered)
EPwm5Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async path
EDIS;
}
//===========================================================================
// End of file.
//===========================================================================
----------------------以上为DSP2803x_EPwm.c-----------------------------------------------------------
Jordan Zhou:
回复 ke ma:
这个值,是否过低,导致误触发?
在使用TMS320f28034这款芯片的单周期斩波功能,遇到了一些问题如下:
ePWM的频率设置为20kHZ;ePWM1,ePWM2,ePWM3同步;ePWM1A和ePWM2A驱动全桥,控制逆变电源(ePWM1B和ePWM2B不使用);ePWM3A和ePWM3B用来做斜波补偿,和电流反馈信号一起从Comp1的一个端口进入,Comp1的另一个端口为软件计算的值写入DACVAL,对ePWM1A,ePWM2A进行斩波。现在发现在一个ePWM周期内出现多次斩波的现象。见附件。
下图通道1为全桥驱动;通道2为ePWM1A(最大占空比设置为50%);通道3为ePWM2A(最大占空比设置为50%);通道4为ePWM3A(占空比设置为50%)和ePWM3B(占空比设置为50%)+反馈电流;a b之间为一个周期。
//###########################################################################
//
// FILE:DSP2803x_Comp.c
//
// TITLE:DSP2803x Comparator Initialization & Support Functions.
//
//###########################################################################
// $TI Release: F2803x C/C++ Header Files and Peripheral Examples V127 $
// $Release Date: March 30, 2013 $
//###########################################################################
#include "DSP2803x_Device.h"// DSP2803x Headerfile Include File
#include "DSP2803x_Examples.h"// DSP2803x Examples Include File
void InitCompDriver(void);
void InitCompGpio(void);
void InitComp(void);
void InitComp(void)
{
InitCompGpio();
InitCompDriver();
}
void InitCompGpio()
{InitComp1Gpio();
}
void InitComp1Gpio()
{EALLOW;GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1;// Disable pull-up for GPIO1 (CMP1OUT)GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 3;// Configure GPIO1 for CMP1OUT operationGpioCtrlRegs.AIOMUX1.bit.AIO2 = 2;// Configure AIO2 for CMP1A (analog input) operationSysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;//EDIS;
}
#if DSP28_COMP2
void InitComp2Gpio()
{EALLOW;GpioCtrlRegs.AIOMUX1.bit.AIO4 = 2;// Configure AIO4 for CMP2A (analog input) operationEDIS;
}
#endif //end DSP28_COMP2
#if DSP28_COMP3
void InitComp3Gpio()
{EALLOW;GpioCtrlRegs.AIOMUX1.bit.AIO6 = 2;// Configure AIO6 for CMP3A (analog input) operationEDIS;
}
#endif //end DSP28_COMP3
/**********************************************************************************/
//函数名:void IntiCompDriver(void);
//功能:比较器模块初始化
//备注:
/*********************************************************************************/
void InitCompDriver()
{EALLOW;SysCtrlRegs.PCLKCR3.bit.COMP1ENCLK = 1;// Enable clock to the Comparator 1 blockComp1Regs.DACVAL.bit.DACVAL = 300;//C_CTCurr_Pro;Comp1Regs.COMPCTL.bit.COMPDACEN = 1;// Power up Comparator 1 locallyComp1Regs.COMPCTL.bit.COMPSOURCE = 0;Comp1Regs.COMPCTL.bit.CMPINV = 0;Comp1Regs.COMPCTL.bit.QUALSEL = 6;Comp1Regs.COMPCTL.bit.SYNCSEL =1;EDIS;
}
//===========================================================================
// End of file.
//===========================================================================
-----------------------------------以上为DSP2803x_Comp.c----------------------------------------------------------------
//**************************************************************************
// Copyright(c)2017-DR_Welding
// 文件名称 : WPCM2315CU2_Isr.c
// 作者 :
// 模块功能 :系统中断
// 局部函数列表: 无
// 更改记录 :
// 日期 DR版本 作者 备注
//
//**************************************************************************
#define in_interrupt
#include "DSP2803x_Header.h"// Headerfile Include File
#include "WPPM3312M2_Isr.h"
#include "WPPM3312M2_SysReg.h"
#include "WPPM3312M2_SysMacro.h"
#include "WPPM3312M2_GlobalVarDef.h"
#include "WPPM3312M2_EepromDriver.h"
#include "WPPM3312M2_Can.h"
#include "WPPM3312M2_Struct.h"
//#include"WPPM3312M2_LedShow.h"
#include"WPPM3312M2_KeyDispose.h"
//============================
// 内部函数声明
//============================
void vPwm1IntIsr(void);
void vTimer0IntIsr(void);
void IsrVarInit(void);
//******************************************************************
// 函数名 :void InitInterrupt(void)
// 作者 :
// 功能 :中断模块初始化
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitInterrupt(void)
{EALLOW;
// 定义PWM1的中断向量PieVectTable.EPWM1_INT = &vPwm1IntIsr;PieCtrlRegs.PIEIER3.bit.INTx1 = 1;IER |= M_INT3;EDIS;
}
//******************************************************************
// 函数名 :void vPwm1IntIsr(void)
// 作者 :
// 功能 :主拓扑PWM中断
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
interrupt void vPwm1IntIsr(void)
{
//========= 更新主功率移相角=========mEnablePowerPwm();
mSetPwm1Duty(1500);
PidLogic();//PI处理
//======================== 清中断标志并再次使能中断 ===========================
EPwm1Regs.ETCLR.bit.INT = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
/****************************************************************************/
//函数名:void PidUpGrading(int PidResult);
// 作者 :MaKe
//功能:比较器模块更新PID计算结果
// 参数 :PidResult :PID计算结果
// 祷?:无
// 调用全局变量:无
// 修改全局变量:无
//备注:2018.06.29
/************************************************************************/
void PidUpGrading(int PidResult)
{EALLOW;Comp1Regs.DACVAL.bit.DACVAL = PidResult; //C_CTCurr_Pro;//原边过流保护点EDIS;
}
------------------------------以上为WPCM2315CU2_Isr.c------------------------------------------------------------------------------//**************************************************************************
// ***
// 文件名称 : DSP2803x_EPwm.c
// 作者 :
// 模块功能 :DSP2803x EPwm Initialization & Support Functions.
// 局部函数列表: 无
// 版本信息 : TI File $Revision: /main/3 $
// Checkin $Date: November 10, 200914:05:11 $
// $TI Release: 2803x C/C++ Header Files V1.21 $
// $Release Date: December 1, 2009 $
// 更改记录 :
//**************************************************************************
#include "DSP2803x_Header.h"// Headerfile Include File
#include "WPPM3312M2_SysMacro.h"
#include "WPPM3312M2_SysReg.h"
#include "DSP2803x_Device.h"
//============================
// 内部函数声明
//============================
void InitEPwmGpio(void);
void InitEPwm1Gpio(void);
void InitEPwm2Gpio(void);
void InitEPwm3Gpio(void);
void InitEPwm4Gpio(void);
void InitEPwm5Gpio(void);
void InitEPwm6Gpio(void);
void InitEPwm7Gpio(void);
void InitEPwmDriver(void);
void InitEPwm1Driver(void);
void InitEPwm2Driver(void);
void InitEPwm3Driver(void);
void InitEPwm4Driver(void);
void InitEPwm5Driver(void);
void InitEPwm6Driver(void);
void InitEPwm7Driver(void);
void InitTzGpio(void);
void InitTzDriver(void);
void InitDCEventDriver(void);
//******************************************************************
// 函数名 :void InitEPwm(void)
// 作者 :TI
// 功能 :初始化系统PWM模块及管脚设置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitEPwm(void)
{
// 配置管脚功能
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
InitEPwmGpio();
// InitTzGpio();
// 初始化寄存器
// InitTzDriver();
// InitDCEventDriver();
InitEPwmDriver();
//mUpDatePwm2Phase(0);
mUpDatePwm2Phase(1500);
//mSetPwm4BDuty(0);
mDisablePowerPwm();
mDisableMotorPWM();
mEnableMotorPWM();//////使能PWM3
// mDisableJRFPWM();
// mDisableFANPWM();
// mDebugPWM(1000);
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
}
//******************************************************************
// 函数名 :void InitEPwmDriver(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as EPwm pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//******************************************************************
void InitEPwmGpio(void)
{
#if DSP28_EPWM1InitEPwm1Gpio();
#endif // endif DSP28_EPWM1
#if DSP28_EPWM2InitEPwm2Gpio();
#endif // endif DSP28_EPWM2
#if DSP28_EPWM3InitEPwm3Gpio();
#endif // endif DSP28_EPWM3
#if DSP28_EPWM4// InitEPwm4Gpio();
#endif // endif DSP28_EPWM4
#if DSP28_EPWM5//InitEPwm5Gpio();
#endif // endif DSP28_EPWM5
#if DSP28_EPWM6//InitEPwm6Gpio();
#endif // endif DSP28_EPWM6
#if DSP28_EPWM7//InitEPwm7Gpio();
#endif // endif DSP28_EPWM7
}
//******************************************************************
// 函数名 :void InitEPwm1Gpio(void)
// 作者 :TI
// 功能 :初始化PWM1输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM1
void InitEPwm1Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO0 = 1;// Disable pull-up on GPIO0 (EPWM1A)
GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1;// Disable pull-up on GPIO1 (EPWM1B)
/* Configure EPWM-1 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM1 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 1;// Configure GPIO0 as EPWM1A
GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 1;// Configure GPIO1 as EPWM1B
EDIS;
}
#endif // endif DSP28_EPWM1
//******************************************************************
// 函数名 :void InitEPwm2Gpio(void)
// 作者 :TI
// 功能 :初始化PWM2输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM2
void InitEPwm2Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1;// Disable pull-up on GPIO2 (EPWM2A)
GpioCtrlRegs.GPAPUD.bit.GPIO3 = 1;// Disable pull-up on GPIO3 (EPWM2B)
/* Configure EPwm-2 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM2 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO2 = 1;// Configure GPIO2 as EPWM2A
GpioCtrlRegs.GPAMUX1.bit.GPIO3 = 1;// Configure GPIO3 as EPWM2B
EDIS;
}
//#endif // endif DSP28_EPWM2
//******************************************************************
// 函数名 :void InitEPwm3Gpio(void)
// 作者 :TI
// 功能 :初始化PWM3输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM3
void InitEPwm3Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.GpioCtrlRegs.GPAPUD.bit.GPIO4 = 1;// Disable pull-up on GPIO4 (EPWM3A)
GpioCtrlRegs.GPAPUD.bit.GPIO5 = 1;// Disable pull-up on GPIO5 (EPWM3B)
/* Configure EPwm-3 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM3 functional pins.
// Comment out other unwanted lines.GpioCtrlRegs.GPAMUX1.bit.GPIO4 = 1;// Configure GPIO4 as EPWM3A
GpioCtrlRegs.GPAMUX1.bit.GPIO5 = 1;// Configure GPIO5 as EPWM3B
EDIS;
}
//#endif // endif DSP28_EPWM3
//******************************************************************
// 函数名 :void InitEPwm4Gpio(void)
// 作者 :TI
// 功能 :初始化PWM4输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM4
void InitEPwm4Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1;// Disable pull-up on GPIO6 (EPWM4A)
GpioCtrlRegs.GPAPUD.bit.GPIO7 = 1;// Disable pull-up on GPIO7 (EPWM4B)
/* Configure EPWM-4 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM4 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 1;// Configure GPIO6 as EPWM4A
GpioCtrlRegs.GPAMUX1.bit.GPIO7 = 1;// Configure GPIO7 as EPWM4B
EDIS;
}
//#endif // endif DSP28_EPWM4
//******************************************************************
// 函数名 :void InitEPwm5Gpio(void)
// 作者 :
// 功能 :初始化PWM5输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :EPWM5模块只用到了GPIO9,故只初始化此管脚
//******************************************************************
//#if DSP28_EPWM5
void InitEPwm5Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO8 = 1;// Disable pull-up on GPIO8 (EPWM5A)
GpioCtrlRegs.GPAPUD.bit.GPIO9 = 1;// Disable pull-up on GPIO9 (EPWM5B)
/* Configure EPWM-5 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM5 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO8 = 1;// Configure GPIO8 as EPWM5A
GpioCtrlRegs.GPAMUX1.bit.GPIO9 = 1;// Configure GPIO9 as EPWM5B
EDIS;
}
//#endif // endif DSP28_EPWM5
//******************************************************************
// 函数名 :void InitEPwm6Gpio(void)
// 作者 :TI
// 功能 :初始化PWM6输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM6
void InitEPwm6Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO10 = 1;// Disable pull-up on GPIO10 (EPWM6A)//GpioCtrlRegs.GPAPUD.bit.GPIO11 = 1;// Disable pull-up on GPIO11 (EPWM6B)
/* Configure EPWM-6 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM6 functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO10 = 1;// Configure GPIO10 as EPWM6A//GpioCtrlRegs.GPAMUX1.bit.GPIO11 = 1;// Configure GPIO11 as EPWM6B
EDIS;
}
//#endif // endif DSP28_EPWM6
//******************************************************************
// 函数名 :void InitEPwm7Gpio(void)
// 作者 :TI
// 功能 :初始化PWM7输出管脚
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM7
void InitEPwm7Gpio(void)
{
EALLOW;
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.//GpioCtrlRegs.GPBPUD.bit.GPIO40 = 1;// Disable pull-up on GPIO40 (EPWM7A)
GpioCtrlRegs.GPBPUD.bit.GPIO41 = 1;// Disable pull-up on GPIO41 (EPWM7B)
/* Configure EPWM-7 pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPWM7 functional pins.
// Comment out other unwanted lines.// GpioCtrlRegs.GPBMUX1.bit.GPIO40 = 1;// Configure GPIO40 as EPWM7A
GpioCtrlRegs.GPBMUX1.bit.GPIO41 = 1;// Configure GPIO41 as EPWM7B
EDIS;
}
//#endif // endif DSP28_EPWM7
//******************************************************************
// 函数名 :void InitEPwmSyncGpio(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as EPwm Synch pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
void InitEPwmSyncGpio(void)
{
//EALLOW;
/* Configure EPWMSYNCI */
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO6 = 0;// Enable pull-up on GPIO6 (EPWMSYNCI)
GpioCtrlRegs.GPBPUD.bit.GPIO32 = 0;// Enable pull-up on GPIO32 (EPWMSYNCI)
/* Set qualification for selected pins to asynch only */
// This will select synch to SYSCLKOUT for the selected pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAQSEL1.bit.GPIO6 = 0;// Synch to SYSCLKOUT GPIO6 (EPWMSYNCI)
GpioCtrlRegs.GPBQSEL1.bit.GPIO32 = 0; // Synch to SYSCLKOUT GPIO32 (EPWMSYNCI)
/* Configure EPwmSync pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be EPwmSync functional pins.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 2;// Configures GPIO6 for EPWMSYNCI operation
GpioCtrlRegs.GPBMUX1.bit.GPIO32 = 2;// Configures GPIO32 for EPWMSYNCI operation.
/* Configure EPWMSYNC0 */
/* Disable internal pull-up for the selected output pinsfor reduced power consumption */
// Pull-ups can be enabled or disabled by the user.
// Comment out other unwanted lines.
// GpioCtrlRegs.GPAPUD.bit.GPIO6 = 1;// Disable pull-up on GPIO6 (EPWMSYNCO)
GpioCtrlRegs.GPBPUD.bit.GPIO33 = 1;// Disable pull-up on GPIO33 (EPWMSYNCO)
// GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 3;// Configures GPIO6 for EPWMSYNCO
GpioCtrlRegs.GPBMUX1.bit.GPIO33 = 2; // Configures GPIO33 for EPWMSYNCO
}
//******************************************************************
// 函数名 :void InitTzGpio(void)
// 作者 :TI
// 功能 :This function initializes GPIO pins to function as Trip Zone (TZ) pins
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//******************************************************************
void InitTzGpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO12 = 0;// Enable pull-up on GPIO12 (TZ1)
// GpioCtrlRegs.GPAPUD.bit.GPIO15 = 0;// Enable pull-up on GPIO15 (TZ1)
GpioCtrlRegs.GPAPUD.bit.GPIO13 = 0;// Enable pull-up on GPIO13 (TZ2)
// GpioCtrlRegs.GPAPUD.bit.GPIO16 = 0;// Enable pull-up on GPIO16 (TZ2)
// GpioCtrlRegs.GPAPUD.bit.GPIO28 = 0;// Enable pull-up on GPIO28 (TZ2)
GpioCtrlRegs.GPAPUD.bit.GPIO14 = 0;// Enable pull-up on GPIO14 (TZ3)
// GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0;// Enable pull-up on GPIO17 (TZ3)
// GpioCtrlRegs.GPAPUD.bit.GPIO29 = 0;// Enable pull-up on GPIO29 (TZ3)
/* Set qualification for selected pins to asynch only */
// Inputs are synchronized to SYSCLKOUT by default.
// This will select asynch (no qualification) for the selected pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAQSEL1.bit.GPIO12 = 3; // Asynch input GPIO12 (TZ1)
// GpioCtrlRegs.GPAQSEL1.bit.GPIO15 = 3; // Asynch input GPIO15 (TZ1)
GpioCtrlRegs.GPAQSEL1.bit.GPIO13 = 3; // Asynch input GPIO13 (TZ2)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO16 = 3; // Asynch input GPIO16 (TZ2)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO28 = 3; // Asynch input GPIO28 (TZ2)
GpioCtrlRegs.GPAQSEL1.bit.GPIO14 = 3; // Asynch input GPIO14 (TZ3)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO17 = 3; // Asynch input GPIO17 (TZ3)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO29 = 3; // Asynch input GPIO29 (TZ3)
/* Configure TZ pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be TZ functional pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAMUX1.bit.GPIO12 = 1; // Configure GPIO12 as TZ1
//GpioCtrlRegs.GPAMUX1.bit.GPIO15 = 1; // Configure GPIO15 as TZ1
GpioCtrlRegs.GPAMUX1.bit.GPIO13 = 1; // Configure GPIO13 as TZ2
// GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 3; // Configure GPIO16 as TZ2
// GpioCtrlRegs.GPAMUX2.bit.GPIO28 = 3; // Configure GPIO28 as TZ2
GpioCtrlRegs.GPAMUX1.bit.GPIO14 = 1; // Configure GPIO14 as TZ3
// GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 3; // Configure GPIO17 as TZ3
// GpioCtrlRegs.GPAMUX2.bit.GPIO29 = 3; // Configure GPIO29 as TZ3
EDIS;
}
//******************************************************************
// 函数名 :void InitEPwmDriver(void)
// 作者 篢I
// 功能 :初始低砅WM模块寄存髋渲?
// 参数 :无
// :无
// 调用全局变量?
//
// 备注
//******************************************************************
void InitEPwmDriver(void)
{
//#if DSP28_EPWM1InitEPwm1Driver();
//#endif
//#if DSP28_EPWM2
InitEPwm2Driver();
//#endif
//#if DSP28_EPWM3
InitEPwm3Driver();
//#endif
//#if DSP28_EPWM4
//InitEPwm4Driver();
//#endif
//#if DSP28_EPWM5
//InitEPwm5Driver();
//#endif
//#if DSP28_EPWM6
// InitEPwm6Driver();
//#endif
#if DSP28_EPWM7
// InitEPwm7Driver();
#endif
}
//******************************************************************
// 函数名 :void InitEPwm1Driver(void)
// 作者 :TI
// 功 :初始化系统ePWM1寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM1
void InitEPwm1Driver(void)
{
EALLOW;
EPwm1Regs.TBPRD = 3000;////PFSB_PERIOD,1250-48K
//EPwm1Regs.TBPRD = 1500;////PFSB_PERIOD,1250-48K
EPwm1Regs.TBPHS.all = 0;
EPwm1Regs.TBCTR = 0;
// Setup TBCLK
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
//EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW; //
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;//Count equal to zero; have a syn output
EPwm1Regs.TBCTL.bit.SWFSYNC = 0;
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; //
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm1Regs.TBCTL.bit.PHSDIR = 1;
EPwm1Regs.TBCTL.bit.FREE_SOFT = 3; //
// Setup compare
EPwm1Regs.CMPA.half.CMPA= 1500;
EPwm1Regs.CMPB = 1500;
EPwm1Regs.TBPHS.half.TBPHS = 0;
// Setup CMPCTL
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET;/////
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.ZRO = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CBU = AQ_SET;
//EPwm1Regs.AQSFRC.bit.RLDCSF = 0;
//Set DeadBand
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;//
EPwm1Regs.DBCTL.bit.IN_MODE = 0x0;
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm1Regs.DBFED = 200;//
//EPwm1Regs.DBRED = 200;//
EPwm1Regs.DBFED = 300;//
EPwm1Regs.DBRED = 300;//
//EPwm1Regs.DBCTL.bit.HALFCYCLE = 1;
// // Set ETSEL
EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // 2:0EPWMxINTn Select
EPwm1Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm1Regs.ETSEL.bit.SOCASEL = ET_CTRU_CMPA; // 10:8Start of conversion A Select
EPwm1Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm1Regs.ETSEL.bit.SOCBSEL = ET_CTRU_CMPB; // 14:12 Start of conversion B Select
EPwm1Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm1Regs.ETPS.bit.INTPRD = ET_1ST; // 1:0EPWMxINTn Period Select
EPwm1Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm1Regs.ETPS.bit.SOCAPRD = ET_1ST; // 9:8EPWMxSOCA Period Select
EPwm1Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm1Regs.ETPS.bit.SOCBPRD = 1; // 13:12 EPWMxSOCB Period Select
EPwm1Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
///////////////////////////////////////////////////////EPwm1Regs.TZSEL.bit.DCAEVT2 = 1;//////EPwm1Regs.TZSEL.bit.DCAEVT2 = 0;//////EPwm1Regs.TZSEL.bit.DCBEVT2 = 0;//////EPwm1Regs.TZSEL.bit.DCBEVT2 = 1;EPwm1Regs.TZSEL.bit.CBC1=1;
// What do we want the TZ1 and TZ2 to doEPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO;EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO;//EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCBH_LOW; //TZ_DCAH_HI;//EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_LOW;EPwm1Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI;EPwm1Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_HI;EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 2 output
EDIS;
}
#endif
//******************************************************************
// 函数名 :void InitEPwm2Driver(void)
// 作者 :TI
// 功能 初始化系统ePWM2寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
#if DSP28_EPWM2
void InitEPwm2Driver(void)
{ EALLOW;
//SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
//EPwm2Regs.TBPRD = 1874;///48k
EPwm2Regs.TBPRD = 3000;///20k// Count up
//EPwm2Regs.TBPRD = 1500;///20k//Count updown
EPwm2Regs.TBPHS.all = 0;
EPwm2Regs.TBCTR = 0;
// Setup TBCLK
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
//EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;//Count updown
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Enable phase loading
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm2Regs.TBCTL.bit.SWFSYNC = 0;
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.PHSDIR = 1;
EPwm2Regs.TBCTL.bit.FREE_SOFT = 3; //
// Setup compare
EPwm2Regs.CMPA.half.CMPA= 1500;//
EPwm2Regs.CMPB= 1500;//
EPwm2Regs.TBPHS.half.TBPHS = 0;
// Setup CMPCTL
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm2Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.ZRO = AQ_CLEAR ;
EPwm2Regs.AQCTLB.bit.CBU = AQ_SET;
// EPwm2Regs.AQSFRC.bit.RLDCSF = 3;
//Set DeadBand
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;
EPwm2Regs.DBCTL.bit.IN_MODE = 0x0;
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm2Regs.DBFED = 200 ;//
//EPwm2Regs.DBRED = 200;
EPwm2Regs.DBFED = 300;//
EPwm2Regs.DBRED = 300;
////斩波比较模块
//EPwm2Regs.TZSEL.bit.DCAEVT2 = 1;
//EPwm2Regs.TZSEL.bit.DCAEVT2 = 0;
//EPwm2Regs.TZSEL.bit.DCBEVT2 = 0;
//EPwm2Regs.TZSEL.bit.DCBEVT2 = 1;
EPwm2Regs.TZSEL.bit.CBC1=1;// What do we want the TZ1 and TZ2 to do?EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;//EPwm2Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCBH_LOW;//EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;EPwm2Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_HI;EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCAH_HI;EPwm2Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT; // DCAH = Comparator 2 outputEPwm2Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (not filtered)EPwm2Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async pathEPwm2Regs.TZEINT.bit.DCBEVT2=0;//??
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
#endif
//******************************************************************
// 函数名 :void InitEPwm3Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM3寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 :
//******************************************************************
//#if DSP28_EPWM3
void InitEPwm3Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
//EPwm3Regs.TBPRD = Motor_PERIOD;
EPwm3Regs.TBPRD = 3000;//1500;//C_MOTOR_PWM_PRD;
EPwm3Regs.TBPHS.all = 0;
EPwm3Regs.TBCTR = 0;
EPwm3Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
//EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // 对称波形输出
EPwm3Regs.TBCTL.bit.PHSEN = TB_DISABLE;// Disable phase loading
EPwm3Regs.TBCTL.bit.PRDLD = TB_SHADOW;
//EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // Count equal to zero; have a syn output
EPwm3Regs.TBCTL.bit.SWFSYNC = 0;
//EPwm3Regs.TBCTL.bit.HSPCLKDIV = 0x04;///1/8
EPwm3Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
// EPwm3Regs.TBCTL.bit.CLKDIV = 0x04;///1/16
EPwm3Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm3Regs.TBCTL.bit.PHSDIR = 1;
EPwm3Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compareEPwm3Regs.CMPA.half.CMPA =1500;
EPwm3Regs.CMPB = 0;
// Setup CMPCTL
EPwm3Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm3Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm3Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm3Regs.AQCTLA.bit.CAU = AQ_CLEAR; //
EPwm3Regs.AQCTLA.bit.PRD = AQ_SET; //
EPwm3Regs.AQCTLB.bit.CBU = AQ_SET; //
EPwm3Regs.AQCTLB.bit.PRD = AQ_CLEAR; //
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTR_PRD; // 2:0EPWMxINTn Select
EPwm3Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
/////////////////////////////////////////////////////
//死区模块(DB)配置
EPwm3Regs.DBCTL.bit.OUT_MODE =DB_FULL_ENABLE;
EPwm3Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
EPwm3Regs.DBCTL.bit.IN_MODE = 0;
//EPwm3Regs.DBCTL.bit.HALFCYCLE = 0;
EPwm3Regs.DBFED = 200;//Falling delay
EPwm3Regs.DBRED = 200; //Raising delay //0.01667*300=5U
// 事件触发模块(EZ)配置
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPA; // 2:0EPWMxINTn Select
EPwm3Regs.ETSEL.bit.INTEN = ET_DISABLE; // 3EPWMxINTn Enable
EPwm3Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // 10:8Start of conversion A Select
EPwm3Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm3Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm3Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm3Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm3Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm3Regs.ETPS.bit.SOCAPRD = 1; // 9:8EPWMxSOCA Period Select
EPwm3Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm3Regs.ETPS.bit.SOCBPRD = 1; // 13:12 EPWMxSOCB Period Select
EPwm3Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm4Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM4寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 送丝机H桥驱动
//******************************************************************
//#if DSP28_EPWM4
void InitEPwm4Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm4Regs.TBPRD = 1000;
EPwm4Regs.TBPHS.all = 0;
EPwm4Regs.TBCTR = 0;
EPwm4Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm4Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up and down
EPwm4Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm4Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm4Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;
EPwm4Regs.TBCTL.bit.SWFSYNC = 0;
EPwm4Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.PHSDIR = 1;
EPwm4Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm4Regs.CMPA.half.CMPA = Motor_PERIOD - 5;
EPwm4Regs.CMPB = 5;
// Setup CMPCTL
EPwm4Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm4Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm4Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm4Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm4Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM4A
EPwm4Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm4Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM4B
EPwm4Regs.AQCTLB.bit.CBD = AQ_SET;
// EPwm4Regs.AQSFRC.bit.RLDCSF = 3;
// Set deadband
// EPwm4Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;// Dead-band Output Mode Control
// EPwm4Regs.DBCTL.bit.POLSEL= DB_ACTV_HI;// Polarity Select Control
// EPwm4Regs.DBCTL.bit.IN_MODE = DBB_ALL;// Dead Band Input Mode Control
// EPwm4Regs.DBFED = 100;//Falling delay
// EPwm4Regs.DBRED = 100;//Raising delay
// Set ETSEL
EPwm4Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm4Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm4Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // 10:8Start of conversion A Select
EPwm4Regs.ETSEL.bit.SOCAEN = ET_ENABLE; // 11Start of conversion A Enable
EPwm4Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm4Regs.ETSEL.bit.SOCBEN = ET_ENABLE; // 15Start of conversion B Enable
EPwm4Regs.ETPS.bit.INTPRD = ET_1ST; // 1:0EPWMxINTn Period Select
EPwm4Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm4Regs.ETPS.bit.SOCAPRD = ET_1ST; // 9:8EPWMxSOCA Period Select
EPwm4Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm4Regs.ETPS.bit.SOCBPRD = ET_1ST; // 13:12 EPWMxSOCB Period Select
EPwm4Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm5Driver(void)
// 作者 :何志军
// 功能 :初始化系统ePWM5寄存髋渲?
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 送丝机H桥驱动
//******************************************************************
//#if DSP28_EPWM5
void InitEPwm5Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm5Regs.TBPRD = 1000;
EPwm5Regs.TBPHS.all = 0;
EPwm5Regs.TBCTR = 0;
// Setup TBCLK
EPwm5Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up
EPwm5Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Disable phase loading
EPwm5Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm5Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm5Regs.TBCTL.bit.SWFSYNC = 0;
EPwm5Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.PHSDIR = 1;
EPwm5Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm5Regs.CMPA.half.CMPA = Motor_PERIOD - 5;
EPwm5Regs.CMPB = 5;
// Setup CMPCTL
EPwm5Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm5Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm5Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm5Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm5Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM6A
EPwm5Regs.AQCTLA.bit.CAD = AQ_CLEAR;
EPwm5Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM6B
EPwm5Regs.AQCTLB.bit.CBD = AQ_SET;
// set deadband
// EPwm5Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;// Dead-band Output Mode Control
// EPwm5Regs.DBCTL.bit.POLSEL= DB_ACTV_HI;// Polarity Select Control
// EPwm5Regs.DBCTL.bit.IN_MODE = DBB_ALL;// Dead Band Input Mode Control
// EPwm5Regs.DBFED = 100;//Falling delay
// EPwm5Regs.DBRED = 100;//Raising delay
EPwm5Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm5Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm5Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO;// 10:8Start of conversion A Select
EPwm5Regs.ETSEL.bit.SOCAEN = ET_DISABLE; // 11Start of conversion A Enable
EPwm5Regs.ETSEL.bit.SOCBSEL = ET_CTR_ZERO; // 14:12 Start of conversion B Select
EPwm5Regs.ETSEL.bit.SOCBEN = ET_DISABLE; // 15Start of conversion B Enable
EPwm5Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm5Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm5Regs.ETPS.bit.SOCAPRD = 0; // 9:8EPWMxSOCA Period Select
EPwm5Regs.ETPS.bit.SOCACNT = 0; // 11:10 EPWMxSOCA Counter Register
EPwm5Regs.ETPS.bit.SOCBPRD = 0; // 13:12 EPWMxSOCB Period Select
EPwm5Regs.ETPS.bit.SOCBCNT = 0; // 15:14 EPWMxSOCB Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm6Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM6寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改全局变量:无
// 备注 : 加热阀控制
//******************************************************************
//#if DSP28_EPWM6//
void InitEPwm6Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm6Regs.TBPRD = 1500;
EPwm6Regs.TBPHS.all = 0;
EPwm6Regs.TBCTR = 0;
EPwm6Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm6Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm6Regs.TBCTL.bit.PHSEN = TB_DISABLE;// Disable phase loading
EPwm6Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm6Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm6Regs.TBCTL.bit.SWFSYNC = 0;
EPwm6Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm6Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm6Regs.TBCTL.bit.PHSDIR = 1;
EPwm6Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm6Regs.CMPA.half.CMPA = 3;
// Setup CMPCTL
EPwm6Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm6Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm6Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm6Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm6Regs.AQCTLA.bit.CAU = AQ_CLEAR; // Set PWM6A
EPwm6Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm6Regs.ETSEL.bit.INTSEL = ET_CTR_PRD; // 2:0EPWMxINTn Select
EPwm6Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm6Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm6Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
EPwm6Regs.AQCSFRC.bit.CSFA = 0;
EPwm6Regs.AQCSFRC.bit.CSFB = 0;// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
//******************************************************************
// 函数名 :void InitEPwm7Driver(void)
// 作者 :TI
// 功能 :初始化系统ePWM7寄存器配置
// 参数 :无
// 返回值 :无
// 调用全局变量:无
// 修改绷浚何?
// 备注 : Slope Compensation PWM Control (Hardware
//******************************************************************
//#if DSP28_EPWM7
void InitEPwm7Driver(void)
{
EALLOW;
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Stop all the TB clocks
EPwm7Regs.TBPRD = 1000;//3130--10K
EPwm7Regs.TBPHS.all = 0;
EPwm7Regs.TBCTR = 0;
EPwm7Regs.TBPHS.half.TBPHS = 0;
// Setup TBCLK
EPwm7Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm7Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm7Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm7Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm7Regs.TBCTL.bit.SWFSYNC = 0;
EPwm7Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm7Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm7Regs.TBCTL.bit.PHSDIR = 1;
EPwm7Regs.TBCTL.bit.FREE_SOFT = 3;
// Setup compare
EPwm7Regs.CMPB = 0;
// Setup CMPCTL
EPwm7Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO
EPwm7Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm7Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm7Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
// EPwm7Regs.AQCTLB.bit.CBU = AQ_CLEAR; // Set PWM7B
// EPwm7Regs.AQCTLB.bit.CBD = AQ_SET;
EPwm7Regs.AQCTLB.bit.ZRO = AQ_SET;
EPwm7Regs.AQCTLB.bit.CBU = AQ_CLEAR;
EPwm7Regs.ETSEL.bit.INTSEL = ET_CTRD_CMPB; // 2:0EPWMxINTn Select
EPwm7Regs.ETSEL.bit.INTEN = ET_ENABLE; // 3EPWMxINTn Enable
EPwm7Regs.ETPS.bit.INTPRD = 1; // 1:0EPWMxINTn Period Select
EPwm7Regs.ETPS.bit.INTCNT = 0; // 3:2EPWMxINTn Counter Register
// SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;// Start all the timers synced
EDIS;
}
//#endif
/******************************************************************/
//函数名:void InitTzDriver(void)
//功能:Initialize the TZ Module for epwm1,epwm2,epwm4,epwm5 and epwm6 of WPPM3312Z
//备注:2015.06.25
//===========================================================================
void InitTzDriver(void)
{// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm1 Module
EALLOW;
EPwm1Regs.TZSEL.bit.CBC1 = 1;
//EPwm1Regs.TZSEL.bit.OSHT1 = 1;
//EPwm1Regs.TZSEL.bit.DCBEVT1 = 1;
EPwm1Regs.TZSEL.bit.DCAEVT1 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
EPwm1Regs.TZCTL.bit.DCAEVT1 = 2;
// EPwm1Regs.TZCTL.bit.DCBEVT1= 2;
// EPwm1Regs.TZDCSEL.bit.DCBEVT1 = TZ_DCBH_LOW;
EPwm1Regs.TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI;
// Enable TZ interrupt
// EPwm1Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1\TZ2 and TZ3 as one shot trip sources on EPwm2 Module
// EALLOW;
EPwm2Regs.TZSEL.bit.CBC1 = 1;
//EPwm2Regs.TZSEL.bit.OSHT1 = 1;
// EPwm2Regs.TZSEL.bit.DCBEVT1= 1;
EPwm2Regs.TZSEL.bit.DCAEVT1= 1;
// What do we want the TZ1 and TZ2 to do?
EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.DCAEVT1 = 2;
// EPwm2Regs.TZCTL.bit.DCBEVT1 = 2;
// EPwm2Regs.TZDCSEL.bit.DCBEVT1 = TZ_DCBH_LOW;
EPwm2Regs.TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI;
// Enable TZ interrupt
// EPwm2Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm4 Module
EPwm3Regs.TZSEL.bit.CBC3 = 1;//FAN
EPwm3Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EALLOW;
// EPwm4Regs.TZSEL.bit.CBC1 = 1;
EPwm4Regs.TZSEL.bit.DCAEVT2 = 1;
// EPwm4Regs.TZSEL.bit.DCBEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm4Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm4Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm4Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm4Regs.TZCTL.bit.DCBEVT2 = 2;
// EPwm4Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;
EPwm4Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// Enable TZ interrupt
// EPwm4Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1/TZ2 and TZ3 as one shot trip sources on EPwm5 Module
// EALLOW;
// EPwm5Regs.TZSEL.bit.CBC1 = 1;
// EPwm5Regs.TZSEL.bit.CBC2 = 1;
//EPwm5Regs.TZSEL.bit.CBC3 = 1;//FAN
EPwm5Regs.TZSEL.bit.DCAEVT2 = 1;
// EPwm5Regs.TZSEL.bit.DCAEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm5Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm5Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm5Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm5Regs.TZCTL.bit.DCBEVT2 = 2;
EPwm5Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// EPwm5Regs.TZDCSEL.bit.DCAEVT2 = TZ_DCAH_LOW;
// Enable TZ interrupt
// EPwm5Regs.TZEINT.bit.OST = 1;
// EDIS;
// Enable TZ1\TZ2 and TZ3 as one shot trip sources on EPwm3 Module
// EALLOW;
// EPwm6Regs.TZSEL.bit.CBC1 = 1;
EPwm6Regs.TZSEL.bit.CBC2 = 1;///JRF
// EPwm6Regs.TZSEL.bit.CBC3 = 1;
// EPwm6Regs.TZSEL.bit.DCAEVT2= 1;
// EPwm6Regs.TZSEL.bit.DCBEVT2 = 1;
// What do we want the TZ1 and TZ2 to do?
EPwm6Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
// EPwm6Regs.TZCTL.bit.TZB = TZ_FORCE_LO;
// EPwm6Regs.TZCTL.bit.DCAEVT2 = 2;
// EPwm6Regs.TZCTL.bit.DCBEVT2 = 2;
// EPwm6Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_LOW;
// EPwm6Regs.TZDCSEL.bit.DCAEVT2= TZ_DCAH_HI;
// EPwm7Regs.TZSEL.bit.CBC2 = 1;//JRF
// EPwm7Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
// Enable TZ interrupt
// EPwm6Regs.TZEINT.bit.OST = 1;
EDIS;
}
/***********************************************************/
//函数名:void InitDCEventDriver
//功能:Initialize Digtal Compare Event Module
//备注:DC Event for protecting Power and Motor
//===========================================================================
void InitDCEventDriver(void)
{
// Define an event (DCAEVT1) based on TZ1 and TZ2
EALLOW;
EPwm1Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 1 output and TZ1 input
// EPwm1Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_TZ1 ;
EPwm1Regs.DCACTL.bit.EVT1SRCSEL = DC_EVT1;// DCAEVT1 = DCAEVT1(not filtered)
EPwm1Regs.DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC;
EPwm2Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT;// DCAH = Comparator 1 output AND TZ1 input
// EPwm2Regs.DCTRIPSEL.bit.DCBHCOMPSEL = DC_TZ1;
EPwm2Regs.DCACTL.bit.EVT1SRCSEL = DC_EVT1;// DCAEVT1 = DCAEVT1 (not filtered)
EPwm2Regs.DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC;
EPwm4Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT;// DCAH = Comparator 2 output
EPwm4Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (not filtered)
EPwm4Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async path
EPwm5Regs.DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT;// DCAH = Comparator 2 output
EPwm5Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT2;// DCAEVT2= DCAEVT2 (not filtered)
EPwm5Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;// Take async path
EDIS;
}
//===========================================================================
// End of file.
//===========================================================================
----------------------以上为DSP2803x_EPwm.c-----------------------------------------------------------
ke ma:
回复 Jordan Zhou:
不是。问题是一个ePWM周期内只应该斩波一次,现在它斩波了两次甚至更多次。如上图示波器抓取的ab之间为一个ePWM周期,3通道(紫色)有高电平斩波后变为低电平,在这个周期内应该一直为低电平,直到下一个ePWM周期再开始新的动作。






