请问一下,C2000 功能 TZ 触发区,是完全关闭 PWM输出,再次上电时才能使能输出?还是达到触发条件(低电平)关闭PWM输出,在恢复成高电平时则恢复PWM输出?增在使用这个功能做硬件保护,测试发现当低电平时,PWM关闭输出,恢复高电平时,PWM正常输出,这样是否会烧毁电机?
desheng yang:
回复 Eric Ma:
Hi,Eric,
谢谢您的答案!我还有疑问的是,当我选择触发模式为 one shot时,表现依然与 Cycle by cycle 一致,这是为什么呢?我外部保护使用的是TZ3。
for(cnt=0;cnt<3;cnt++){PWM_enableTripZoneSrc(obj->pwmHandle[cnt],PWM_TripZoneSrc_CycleByCycle_TZ6_NOT);
PWM_enableTripZoneSrc(obj->pwmHandle[cnt],PWM_TripZoneSrc_CycleByCycle_TZ5_NOT);
PWM_enableTripZoneSrc(obj->pwmHandle[cnt],PWM_TripZoneSrc_OneShot_TZ3_NOT);
// What do we want the OST/CBC events to do?// TZA events can force EPWMxA// TZB events can force EPWMxB
PWM_setTripZoneState_TZA(obj->pwmHandle[cnt],PWM_TripZoneState_EPWM_Low);PWM_setTripZoneState_TZB(obj->pwmHandle[cnt],PWM_TripZoneState_EPWM_Low);}
请问一下,C2000 功能 TZ 触发区,是完全关闭 PWM输出,再次上电时才能使能输出?还是达到触发条件(低电平)关闭PWM输出,在恢复成高电平时则恢复PWM输出?增在使用这个功能做硬件保护,测试发现当低电平时,PWM关闭输出,恢复高电平时,PWM正常输出,这样是否会烧毁电机?
Eric Ma:
回复 desheng yang:
"我还有疑问的是,当我选择触发模式为 one shot时,表现依然与 Cycle by cycle 一致,这是为什么呢?我外部保护使用的是TZ3。"
Eric:
如果你设置TZ3 为one shot, 然后TZ3有个低电平信号来之后,C2000 pwm就会拉低。
你说的表现和cycle by cycle一样,那么我的判断是程序中有代码把TZFLG给清除掉了,然后导致PWM又恢复了,如enable PWM的函数。所以你要找找程序中哪里有调用TZFLG CLEAR之类的函数。
请问一下,C2000 功能 TZ 触发区,是完全关闭 PWM输出,再次上电时才能使能输出?还是达到触发条件(低电平)关闭PWM输出,在恢复成高电平时则恢复PWM输出?增在使用这个功能做硬件保护,测试发现当低电平时,PWM关闭输出,恢复高电平时,PWM正常输出,这样是否会烧毁电机?
desheng yang:
回复 Eric Ma:
Hi, Eric,
是的,我在主循环中,若控制状态和EST状态都在 online,是仍然使能 PWM的。
我不知道这是不是根源,我的疑问是,若发生 TZ 触发事件,关闭了 PWM输出,是否会将控制状态等转变为空闲?或者说标志位 Flag_Run_Identify 和 Flag_enableSys是否会被清零?
若没有被清零,在发生 TZ 触发拉低PWM 后,我如何检测当前状态?或者说如何一直关闭PWM?我没有使用 DRV 驱动,因此没有 SPI 读取故障信息。谢谢您!
请问一下,C2000 功能 TZ 触发区,是完全关闭 PWM输出,再次上电时才能使能输出?还是达到触发条件(低电平)关闭PWM输出,在恢复成高电平时则恢复PWM输出?增在使用这个功能做硬件保护,测试发现当低电平时,PWM关闭输出,恢复高电平时,PWM正常输出,这样是否会烧毁电机?
desheng yang:
回复 Eric Ma:
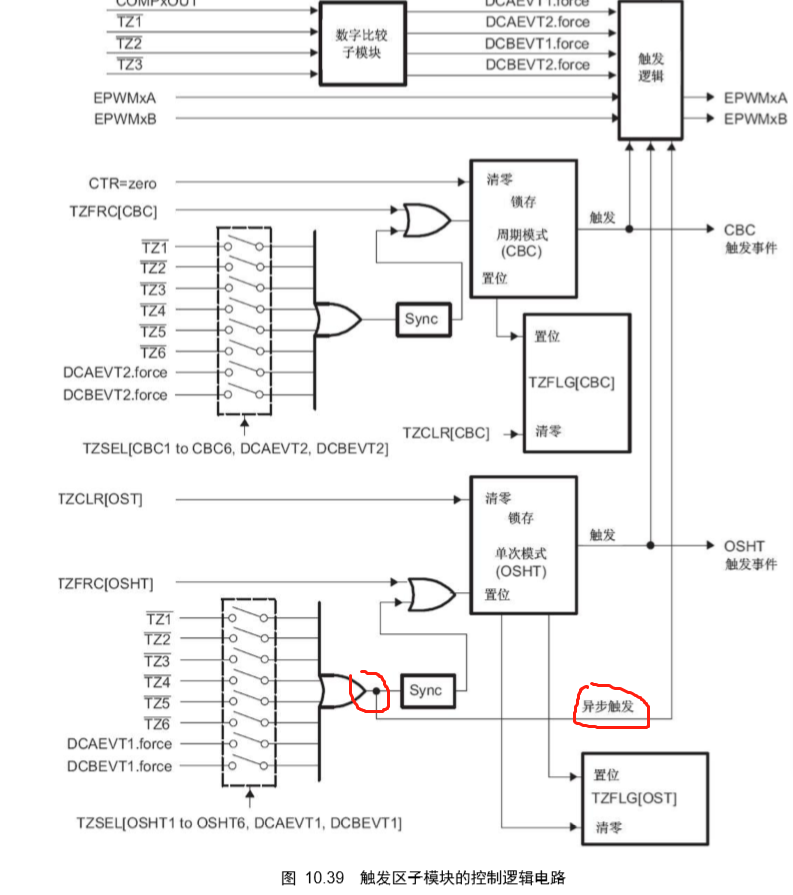
另外一个疑问是,若选择 TZ 异步触发,是否还会走 TZFLG 标志位置位?
请问一下,C2000 功能 TZ 触发区,是完全关闭 PWM输出,再次上电时才能使能输出?还是达到触发条件(低电平)关闭PWM输出,在恢复成高电平时则恢复PWM输出?增在使用这个功能做硬件保护,测试发现当低电平时,PWM关闭输出,恢复高电平时,PWM正常输出,这样是否会烧毁电机?
Eric Ma:
回复 desheng yang:
"是的,我在主循环中,若控制状态和EST状态都在 online,是仍然使能 PWM的。
我不知道这是不是根源,我的疑问是,若发生 TZ 触发事件,关闭了 PWM输出,是否会将控制状态等转变为空闲?或者说标志位 Flag_Run_Identify 和 Flag_enableSys是否会被清零?
若没有被清零,在发生 TZ 触发拉低PWM 后,我如何检测当前状态?或者说如何一直关闭PWM?我没有使用 DRV 驱动,因此没有 SPI 读取故障信息"
Eric:
跟TZ异步同步没啥关系。
主要是enable PWM 这个函数会清除TZ的标志位。
run identify 和enable system一般都是手动清零。不会自动清零,除非在预测参数时出现系统故障。
请问一下,C2000 功能 TZ 触发区,是完全关闭 PWM输出,再次上电时才能使能输出?还是达到触发条件(低电平)关闭PWM输出,在恢复成高电平时则恢复PWM输出?增在使用这个功能做硬件保护,测试发现当低电平时,PWM关闭输出,恢复高电平时,PWM正常输出,这样是否会烧毁电机?
desheng yang:
回复 Eric Ma:
HI, Eric, 关于标志问题,明白了,谢谢您!但是,我主循环也是按照例程执行的,HAL_enablePwm(halHandle);函数也只有在 online 状态执行,在运行阶段,ctrl_state 一直是 online 状态,因此按照下面程序逻辑,在状态没有改变以前是不会再执行 if(flag_ctrlStateChanged) 该条件内的内容,因此,在发生 TZ 事件后,应该也不会执行吧?还是说 TZ 事件发生之后,改变了控制状态? while(gMotorVars.Flag_enableSys){CTRL_Obj *obj = (CTRL_Obj *)ctrlHandle;// increment countersgCounter_updateGlobals++;// enable/disable the use of motor parameters being loaded from user.hCTRL_setFlag_enableUserMotorParams(ctrlHandle,gMotorVars.Flag_enableUserParams);// enable/disable Rs recalibration during motor startupEST_setFlag_enableRsRecalc(obj->estHandle,gMotorVars.Flag_enableRsRecalc);// enable/disable automatic calculation of bias valuesCTRL_setFlag_enableOffset(ctrlHandle,gMotorVars.Flag_enableOffsetcalc);if(CTRL_isError(ctrlHandle)){// set the enable controller flag to falseCTRL_setFlag_enableCtrl(ctrlHandle,false);// set the enable system flag to falsegMotorVars.Flag_enableSys = false;// disable the PWMHAL_disablePwm(halHandle);}else{// update the controller statebool flag_ctrlStateChanged = CTRL_updateState(ctrlHandle);// enable or disable the controlCTRL_setFlag_enableCtrl(ctrlHandle, gMotorVars.Flag_Run_Identify);if(flag_ctrlStateChanged){CTRL_State_e ctrlState = CTRL_getState(ctrlHandle);if(ctrlState == CTRL_State_OffLine){// enable the PWMHAL_enablePwm(halHandle);}else if(ctrlState == CTRL_State_OnLine){if(gMotorVars.Flag_enableOffsetcalc == true){// update the ADC bias valuesHAL_updateAdcBias(halHandle);}else{// set the current biasHAL_setBias(halHandle,HAL_SensorType_Current,0,_IQ(I_A_offset));HAL_setBias(halHandle,HAL_SensorType_Current,1,_IQ(I_B_offset));HAL_setBias(halHandle,HAL_SensorType_Current,2,_IQ(I_C_offset));// set the voltage biasHAL_setBias(halHandle,HAL_SensorType_Voltage,0,_IQ(V_A_offset));HAL_setBias(halHandle,HAL_SensorType_Voltage,1,_IQ(V_B_offset));HAL_setBias(halHandle,HAL_SensorType_Voltage,2,_IQ(V_C_offset));}// Return the bias value for currentsgMotorVars.I_bias.value[0] = HAL_getBias(halHandle,HAL_SensorType_Current,0);gMotorVars.I_bias.value[1] = HAL_getBias(halHandle,HAL_SensorType_Current,1);gMotorVars.I_bias.value[2] = HAL_getBias(halHandle,HAL_SensorType_Current,2);// Return the bias value for voltagesgMotorVars.V_bias.value[0] = HAL_getBias(halHandle,HAL_SensorType_Voltage,0);gMotorVars.V_bias.value[1] = HAL_getBias(halHandle,HAL_SensorType_Voltage,1);gMotorVars.V_bias.value[2] = HAL_getBias(halHandle,HAL_SensorType_Voltage,2);// enable the PWMHAL_enablePwm(halHandle);}else if(ctrlState == CTRL_State_Idle){// disable the PWMHAL_disablePwm(halHandle);gMotorVars.Flag_Run_Identify = false;}if((CTRL_getFlag_enableUserMotorParams(ctrlHandle) == true) &&(ctrlState > CTRL_State_Idle) &&(gMotorVars.CtrlVersion.minor == 6)){// call this function to fix 1p6USER_softwareUpdate1p6(ctrlHandle);}}}if(EST_isMotorIdentified(obj->estHandle)){// set the current rampEST_setMaxCurrentSlope_pu(obj->estHandle,gMaxCurrentSlope);gMotorVars.Flag_MotorIdentified = true;// set the speed referenceCTRL_setSpd_ref_krpm(ctrlHandle,gMotorVars.SpeedRef_krpm);// set the speed accelerationCTRL_setMaxAccel_pu(ctrlHandle,_IQmpy(MAX_ACCEL_KRPMPS_SF,gMotorVars.MaxAccel_krpmps));if(Flag_Latch_softwareUpdate){Flag_Latch_softwareUpdate = false;USER_calcPIgains(ctrlHandle);// initialize the watch window kp and ki current values with pre-calculated valuesgMotorVars.Kp_Idq = CTRL_getKp(ctrlHandle,CTRL_Type_PID_Id);gMotorVars.Ki_Idq = CTRL_getKi(ctrlHandle,CTRL_Type_PID_Id);// initialize the watch window kp and ki values with pre-calculated valuesgMotorVars.Kp_spd = CTRL_getKp(ctrlHandle,CTRL_Type_PID_spd);gMotorVars.Ki_spd = CTRL_getKi(ctrlHandle,CTRL_Type_PID_spd);}}else{Flag_Latch_softwareUpdate = true;// the estimator sets the maximum current slope during identificationgMaxCurrentSlope = EST_getMaxCurrentSlope_pu(obj->estHandle);}// when appropriate, update the global variablesif(gCounter_updateGlobals >= NUM_MAIN_TICKS_FOR_GLOBAL_VARIABLE_UPDATE){// reset the countergCounter_updateGlobals = 0;updateGlobalVariables_motor(ctrlHandle);}// update Kp and Ki gainsupdateKpKiGains(ctrlHandle);// enable/disable the forced angleEST_setFlag_enableForceAngle(obj->estHandle,gMotorVars.Flag_enableForceAngle);} // end of while(gFlag_enableSys) loop





