最近在用28035做永磁同步电机的双闭环FOC, 硬件是用的 oprl-rt 实时仿真软件,做硬件在换调试代码。
硬件部分是rt-lab 是基于matlab的模型, 就是一个逆变器和一个已知参数的电机。
程序部分是普通的Id=0启动,采用的TI的demo 。
但是遇到一个问题就是, 程序中,park变换和ipark变化不能都直接使用matlab模型中电机输出的角度。
如果使用同一个角度,电机转不起来。
而给ipark角度加一个180度 电机就可以转起来了。
如下:
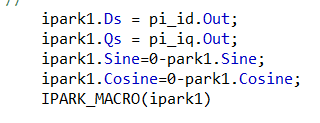
请问各位有没有遇到过这样的情况,这种情况是什么原因造成的? 如果必须增加这个角度,这时在程序中观测到的反馈的dq轴电流怎么理解,还是对应的dq轴吗?
目前情况时 ipark角度加了之后, id=0 转是没有问题的。
请各位不吝赐教! !
Li Robert:不知道是否為你要的問題(可能為編碼器 啟動問題):
training.eeworld.com.cn/…/8877
www.amobbs.com/…/tid-592329.html
最近在用28035做永磁同步电机的双闭环FOC, 硬件是用的 oprl-rt 实时仿真软件,做硬件在换调试代码。
硬件部分是rt-lab 是基于matlab的模型, 就是一个逆变器和一个已知参数的电机。
程序部分是普通的Id=0启动,采用的TI的demo 。
但是遇到一个问题就是, 程序中,park变换和ipark变化不能都直接使用matlab模型中电机输出的角度。
如果使用同一个角度,电机转不起来。
而给ipark角度加一个180度 电机就可以转起来了。
如下:
请问各位有没有遇到过这样的情况,这种情况是什么原因造成的? 如果必须增加这个角度,这时在程序中观测到的反馈的dq轴电流怎么理解,还是对应的dq轴吗?
目前情况时 ipark角度加了之后, id=0 转是没有问题的。
请各位不吝赐教! !
congcong zhang1:
回复 Li Robert:
感谢您的回复,但是现在还是没有找到我想要的答案。因为现在不是编码器或者说 matlab反馈的速度有问题,而是在程序中,按照框图本应采用同一个角度的 park ipark变换,却需要采用相差180度的不同角度,不知道原因在哪里。。





