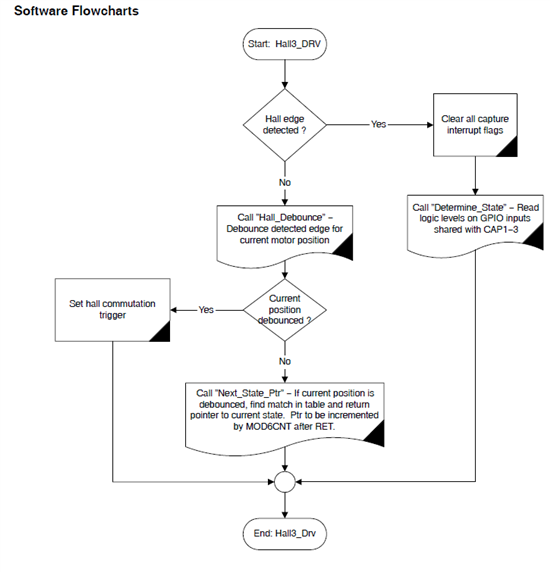
TI工程师,您好! 我最近在看BLDC3_1中Hall3_DRV模块的程序,大致的意思是当检测到有捕获中断后,读取三个cap口的电平值;反之,就调用debonuce函数去抖。我思考了很久,也不明白debounce函数是什么意思。它先判断HallGpio和HallGpioAccepted是否相等,但这个HallGpioAccepted的值从何而来?我只看到Hall3初始化的时候它是被HallGpio赋值,之后就找不到它会在其他的什么地方改变了。还有,HallGpioBuffer也是这样,难道它们都需要用户再写一段自定义代码吗?亦或是有什么玄妙的地方? 希望能得到你们的技术支持,非常感谢!
Blake Ma:
您好,
请问您所使用的是哪个示例工程?在 controlSUITE 里可以找到吗?
TI工程师,您好! 我最近在看BLDC3_1中Hall3_DRV模块的程序,大致的意思是当检测到有捕获中断后,读取三个cap口的电平值;反之,就调用debonuce函数去抖。我思考了很久,也不明白debounce函数是什么意思。它先判断HallGpio和HallGpioAccepted是否相等,但这个HallGpioAccepted的值从何而来?我只看到Hall3初始化的时候它是被HallGpio赋值,之后就找不到它会在其他的什么地方改变了。还有,HallGpioBuffer也是这样,难道它们都需要用户再写一段自定义代码吗?亦或是有什么玄妙的地方? 希望能得到你们的技术支持,非常感谢!
zhenyu Fu:
回复 Blake Ma:
不是 controlSUITE 中的,是在这个网址上下载的http://www.ti.com.cn/mcu/cn/docs/mcuprodtoolsw.tsp?sectionId=95&tabId=1222&familyId=916&toolTypeId=66&go=Go,用的是这个示例工程 F280x BLDC3_1:含传感器、BLDC 电机的梯形控制(使用霍尔传感器),希望您能指点一下!
TI工程师,您好! 我最近在看BLDC3_1中Hall3_DRV模块的程序,大致的意思是当检测到有捕获中断后,读取三个cap口的电平值;反之,就调用debonuce函数去抖。我思考了很久,也不明白debounce函数是什么意思。它先判断HallGpio和HallGpioAccepted是否相等,但这个HallGpioAccepted的值从何而来?我只看到Hall3初始化的时候它是被HallGpio赋值,之后就找不到它会在其他的什么地方改变了。还有,HallGpioBuffer也是这样,难道它们都需要用户再写一段自定义代码吗?亦或是有什么玄妙的地方? 希望能得到你们的技术支持,非常感谢!
zhenyu Fu:
回复 Blake Ma:
您好,在 controlSUITE 中也可以找到,路径为ti\controlSUITE\development_kits\DRV8312-C2-KIT_v128\BLDC_Sensored,那个去抖程序就在该工程下的f2803xhall_gpio_BLDC.h 这个头文件中, 希望你能指点一下,非常感谢!
TI工程师,您好! 我最近在看BLDC3_1中Hall3_DRV模块的程序,大致的意思是当检测到有捕获中断后,读取三个cap口的电平值;反之,就调用debonuce函数去抖。我思考了很久,也不明白debounce函数是什么意思。它先判断HallGpio和HallGpioAccepted是否相等,但这个HallGpioAccepted的值从何而来?我只看到Hall3初始化的时候它是被HallGpio赋值,之后就找不到它会在其他的什么地方改变了。还有,HallGpioBuffer也是这样,难道它们都需要用户再写一段自定义代码吗?亦或是有什么玄妙的地方? 希望能得到你们的技术支持,非常感谢!
ZiHan Lin:
回复 zhenyu Fu:
也是一直搞不明白这个HALL驱动的意思,求解!