我在分析这两个程序的时候,不知道RMP_gen这个函数的作用是什么。假设生成正向的斜坡函数,那么RMP_CNTL的输出应该是以下的形式 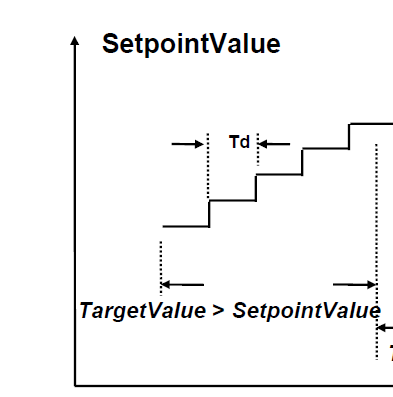 这是程序附带的参考文档中给的,没有什么问题,可是在程序中RAMP_CNTL的输出是RMP_GEN的输入,而RMPGEN的输出由下式给出:Angle=Angle+StepAngleMax×Freq(经过限幅),而在每一次中断执行的时候,总有关系式Freq=SetpointValue就会有下面的输出结果
这是程序附带的参考文档中给的,没有什么问题,可是在程序中RAMP_CNTL的输出是RMP_GEN的输入,而RMPGEN的输出由下式给出:Angle=Angle+StepAngleMax×Freq(经过限幅),而在每一次中断执行的时候,总有关系式Freq=SetpointValue就会有下面的输出结果 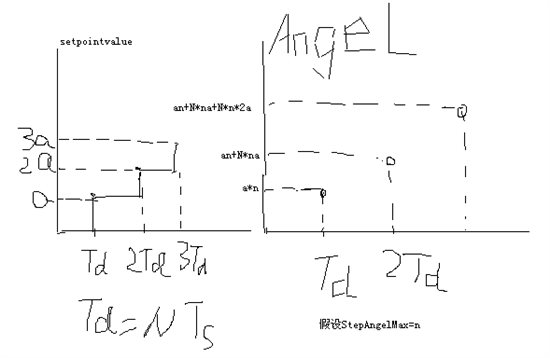 如果按这个图计算,RMP_GEN输出每个区间内斜率是不同的,它的输出就不是一个斜坡函数,我想请教一下,我分析的哪里有问题,还有我不是很明白在开环的时候这个输出的角度当做ipark变换的输入角度,可是为什么他能和闭环实际测量的角度波形一样呢,用RMP_GEN产生的角度我看参考文档,应该是利用寄存器只能存储有限大小的数据并且会发生溢出现象来产生斜坡输出,不知道我是哪里分析错了,还请指导一下,谢谢
如果按这个图计算,RMP_GEN输出每个区间内斜率是不同的,它的输出就不是一个斜坡函数,我想请教一下,我分析的哪里有问题,还有我不是很明白在开环的时候这个输出的角度当做ipark变换的输入角度,可是为什么他能和闭环实际测量的角度波形一样呢,用RMP_GEN产生的角度我看参考文档,应该是利用寄存器只能存储有限大小的数据并且会发生溢出现象来产生斜坡输出,不知道我是哪里分析错了,还请指导一下,谢谢
Jay:
你好。
你分析的没有问题。
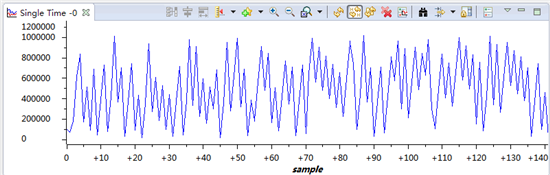
RC是用来控制RG输出角度的斜率的。所以你在启动过程中可以看到以下的rg.out波形。

另外一个问题, 开环时rg.out和闭环时实测的角度波形形状应该是一样的,都是锯齿波,但是如果放在一起看,会有相们差。