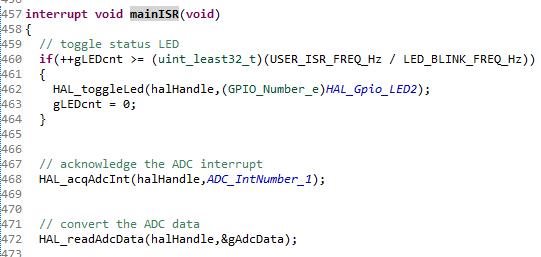
上图是motorware例程中的中断服务函数,本人是菜鸟,希望能够得到大神的指点,我的问题如下:
1. 怎样触发执行interrupt void mainISR(void)这个中断服务函数,它是属于定时器中断还是外部中断,一旦进入interrupt void mainISR(void),它里面的中断子函数都要按顺序依次执行吗?
2. interrupt void mainISR(void)只是将所有的中断归纳在一起吗? 只要是条件合适就触发它里面的子函数吗?那如果是这样的话,interrupt void mainISR(void)最开始的点亮LED灯的语句是在什么时候执行的,怎样才能触发执行闪烁LED灯这几条语句?
3. 有没有主中断(mainISR)这个概念?如果有,什么叫做主中断?
Emma Wang:
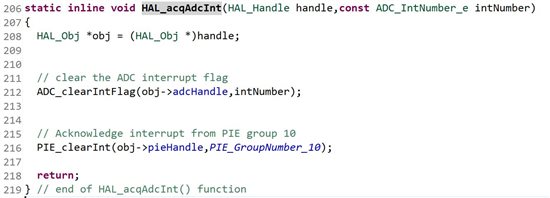
在hal.h这个文件中可以有一行代码,

说明是由ADCINT1触发的主函数中断,条件满足进入函数后,依次执行点亮LED灯,清AD中断,进行ADC数据转换等后续工作。
上图是motorware例程中的中断服务函数,本人是菜鸟,希望能够得到大神的指点,我的问题如下:
1. 怎样触发执行interrupt void mainISR(void)这个中断服务函数,它是属于定时器中断还是外部中断,一旦进入interrupt void mainISR(void),它里面的中断子函数都要按顺序依次执行吗?
2. interrupt void mainISR(void)只是将所有的中断归纳在一起吗? 只要是条件合适就触发它里面的子函数吗?那如果是这样的话,interrupt void mainISR(void)最开始的点亮LED灯的语句是在什么时候执行的,怎样才能触发执行闪烁LED灯这几条语句?
3. 有没有主中断(mainISR)这个概念?如果有,什么叫做主中断?
jian sun1:
回复 Emma Wang:
比如说,我如果要加一个CAN的中断服务函数,那函数名有要求吗?
可以这样写吗?
如:pie->ECAN1INT = &canISR;
interrupt void canISR(void);
上图是motorware例程中的中断服务函数,本人是菜鸟,希望能够得到大神的指点,我的问题如下:
1. 怎样触发执行interrupt void mainISR(void)这个中断服务函数,它是属于定时器中断还是外部中断,一旦进入interrupt void mainISR(void),它里面的中断子函数都要按顺序依次执行吗?
2. interrupt void mainISR(void)只是将所有的中断归纳在一起吗? 只要是条件合适就触发它里面的子函数吗?那如果是这样的话,interrupt void mainISR(void)最开始的点亮LED灯的语句是在什么时候执行的,怎样才能触发执行闪烁LED灯这几条语句?
3. 有没有主中断(mainISR)这个概念?如果有,什么叫做主中断?
user5919672:
回复 jian sun1:
请问楼主弄明白了吗?是怎么进入mainISR的,新手上路,真心求解