{
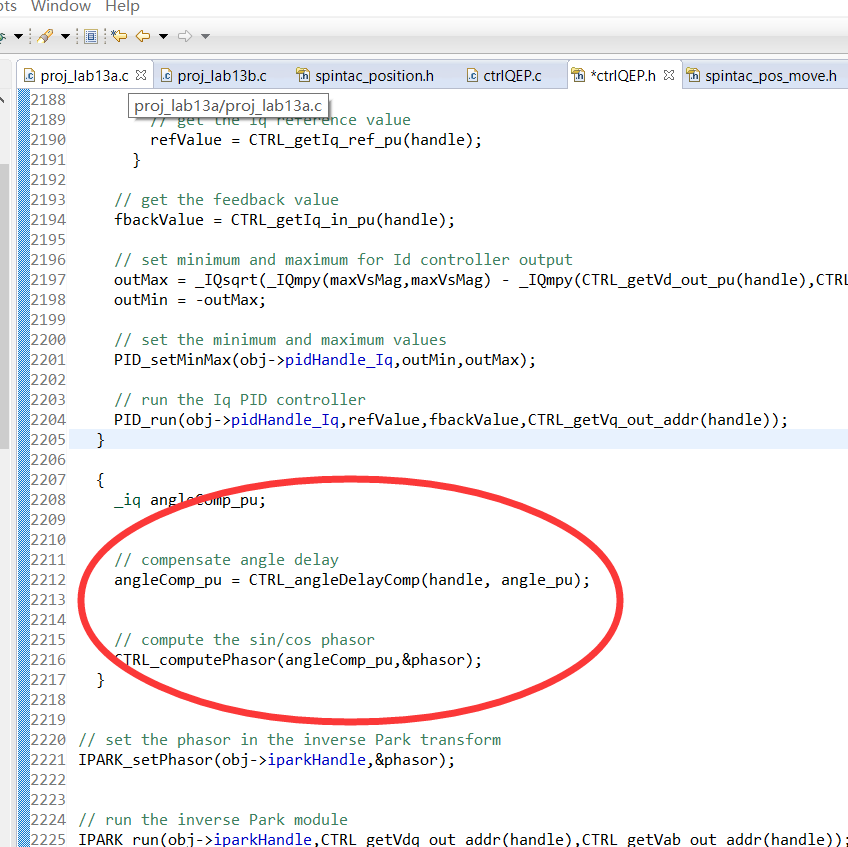
_iq angleComp_pu;
// compensate angle delay
angleComp_pu = CTRL_angleDelayComp(handle, angle_pu);
// compute the sin/cos phasor
CTRL_computePhasor(angleComp_pu,&phasor);
}
Annie Liu:
为更加有效地解决您的问题,我们建议您将问题发布在E2E英文技术论坛上“http://e2e.ti.com/support/microcontrollers/c2000/f/171”,将由资深的工程师为您提供帮助。我们的E2E英文社区有TI专家进行回复,并得到全球各地工程师的支持,分享他们的知识和经验。





