我使用的28068FFPT芯片,自己做的硬件,运行SPIN_FOC例程lab10c的程序,发现AD运行一次三相电流电压就不更新了,dcBus的值时有时无(如下图),中断运行都正常,请问这是什么原因。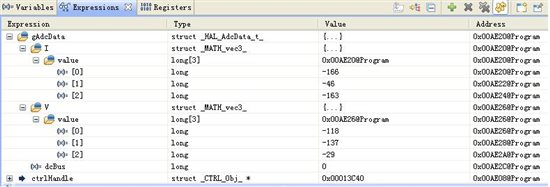
Eason Wang:
Move to C2000 forum
我使用的28068FFPT芯片,自己做的硬件,运行SPIN_FOC例程lab10c的程序,发现AD运行一次三相电流电压就不更新了,dcBus的值时有时无(如下图),中断运行都正常,请问这是什么原因。
Martin Yu:
Jianwei,
你自己做的板子,AD通道是否改了?需要在AD初始化中相应更改通道。
我使用的28068FFPT芯片,自己做的硬件,运行SPIN_FOC例程lab10c的程序,发现AD运行一次三相电流电压就不更新了,dcBus的值时有时无(如下图),中断运行都正常,请问这是什么原因。
Xiong JIANWEI:
回复 Martin Yu:
AD通道都改过了,显示好像第一次转换了,然后就不再转换更新
我使用的28068FFPT芯片,自己做的硬件,运行SPIN_FOC例程lab10c的程序,发现AD运行一次三相电流电压就不更新了,dcBus的值时有时无(如下图),中断运行都正常,请问这是什么原因。
Xiong JIANWEI:
回复 Xiong JIANWEI:
跟编译器的版本有关系吗,编译时有个警示需要6.2.3的版本,我用的CCS5.5,编译器是6.2.0的
还有就是gMotorVars.Flag_enableSys标志不使能的情况下,AD是否持续转换?
我使用的28068FFPT芯片,自己做的硬件,运行SPIN_FOC例程lab10c的程序,发现AD运行一次三相电流电压就不更新了,dcBus的值时有时无(如下图),中断运行都正常,请问这是什么原因。
Xiong JIANWEI:
回复 Martin Yu:
你好Martin Yu
今天又调试了一下,上面显示的AD值不是实际转换的值,是I_bias校正偏移的值(附图),这就是说程序里AD转换并没有启动,请问应该是哪儿的问题
而且用示波器看到有PWM输出,但也是个固定值,没有持续更新。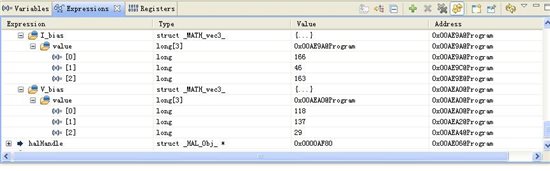
我使用的28068FFPT芯片,自己做的硬件,运行SPIN_FOC例程lab10c的程序,发现AD运行一次三相电流电压就不更新了,dcBus的值时有时无(如下图),中断运行都正常,请问这是什么原因。
Martin Yu:
回复 Xiong JIANWEI:
建议检查下你的ADC中断的触发源是否有相应改变:
// configure the interrupt sources ADC_disableInt(obj->adcHandle,ADC_IntNumber_1); ADC_setIntMode(obj->adcHandle,ADC_IntNumber_1,ADC_IntMode_ClearFlag); ADC_setIntSrc(obj->adcHandle,ADC_IntNumber_1,ADC_IntSrc_EOC7);
我使用的28068FFPT芯片,自己做的硬件,运行SPIN_FOC例程lab10c的程序,发现AD运行一次三相电流电压就不更新了,dcBus的值时有时无(如下图),中断运行都正常,请问这是什么原因。
Martin Yu:
回复 Xiong JIANWEI:
Jianwei,
你用哪个lab程序试的?建议用lab3a不带电机,先试下offset计算,一般电流的三个值一样,在0.9~1.05左右,电压三个值一样,220V输入则为0.38左右,则证明是正常的;按照你的截图,说明ADC采样不对,具体是软件还是硬件,需要排查,先检查ADC和PWM的初始化程序和user.h的设置。
你是哪的客户?可以联系当地的代理商或TI的FAE帮忙。
我使用的28068FFPT芯片,自己做的硬件,运行SPIN_FOC例程lab10c的程序,发现AD运行一次三相电流电压就不更新了,dcBus的值时有时无(如下图),中断运行都正常,请问这是什么原因。
Xiong JIANWEI:
回复 Martin Yu:
Martin Yu ,非常感谢你的解答
我用的是lab10C程序,硬件是按照TI文档介绍的,进AD的信号都对,软件里面AD和PWM初始化都没有动,只改了相应的IO口和AD通道,
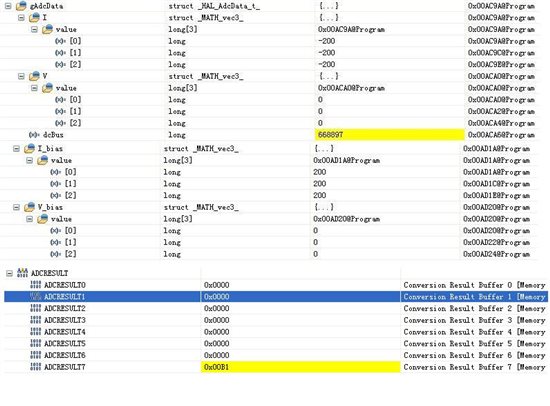
按你说的我用lab3a调试了一下,电流电压AD转换还是没有值,只显示减去偏移后的值,但和用运行的值不一样,电流和电压的偏移都一至。
只有dcBus的值在变,从寄存器中也只看到通道7的值在变,但和实际值相差很远,应该也不是真实值。见下图
我使用的28068FFPT芯片,自己做的硬件,运行SPIN_FOC例程lab10c的程序,发现AD运行一次三相电流电压就不更新了,dcBus的值时有时无(如下图),中断运行都正常,请问这是什么原因。
Martin Yu:
回复 Xiong JIANWEI:
Jianwei,
lab3a跑出来的值不对的,应该还是ADC和PWM的配置方面。你把这部分的原理图截图和配置代码发上来看看。你是哪里的,最好联系支持贵司的代理商的FAE现场帮你看看,这样效率高些。
我使用的28068FFPT芯片,自己做的硬件,运行SPIN_FOC例程lab10c的程序,发现AD运行一次三相电流电压就不更新了,dcBus的值时有时无(如下图),中断运行都正常,请问这是什么原因。
Xiong JIANWEI:
回复 Martin Yu:
Martin Yu 你好,
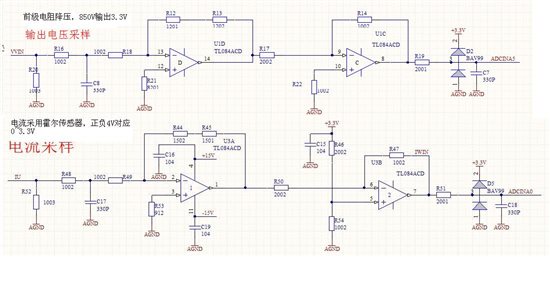
我的电压采样对技术文档差不多,电阻降压后经过运放,850V输出3.3V,正常输入是380V。母线就是540V。测量板子上母线电压输入到芯片引脚是1.805V
三相输出电压到芯片引脚是0V,电流采样用的霍尔传感器正负4V出0-3.3V。现在无电流时进芯片是1.65V。ADC和PWM改动较少,主要是通道,寄存器配置没怎么动。修改了几个地方做有注示,用lab03试验时PWM波形很正常,会连续变动,主要还是看不到AD转的值。
void HAL_setupAdcs(HAL_Handle handle){ HAL_Obj *obj = (HAL_Obj *)handle;
// disable the ADCs ADC_disable(obj->adcHandle);
// power up the bandgap circuit ADC_enableBandGap(obj->adcHandle);
// set the ADC voltage reference source to internal ADC_setVoltRefSrc(obj->adcHandle,ADC_VoltageRefSrc_Int);
// enable the ADC reference buffers ADC_enableRefBuffers(obj->adcHandle);
// Set main clock scaling factor (max45MHz clock for the ADC module) ADC_setDivideSelect(obj->adcHandle,ADC_DivideSelect_ClkIn_by_2);
// power up the ADCs ADC_powerUp(obj->adcHandle);
// enable the ADCs ADC_enable(obj->adcHandle);
// set the ADC interrupt pulse generation to prior ADC_setIntPulseGenMode(obj->adcHandle,ADC_IntPulseGenMode_Prior);
// set the temperature sensor source to external ADC_setTempSensorSrc(obj->adcHandle,ADC_TempSensorSrc_Ext);
// configure the interrupt sources ADC_disableInt(obj->adcHandle,ADC_IntNumber_1); ADC_setIntMode(obj->adcHandle,ADC_IntNumber_1,ADC_IntMode_ClearFlag); ADC_setIntSrc(obj->adcHandle,ADC_IntNumber_1,ADC_IntSrc_EOC7);
//configure the SOCs for hvkit_rev1p1 // EXT IA-FB //ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_0,ADC_SocChanNumber_A1); ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_0,ADC_SocChanNumber_A0); //changed by xjw ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_0,ADC_SocTrigSrc_EPWM1_ADCSOCA); ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_0,ADC_SocSampleDelay_9_cycles);
// EXT IA-FB // Duplicate conversion due to ADC Initial Conversion bug (SPRZ342) //ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_1,ADC_SocChanNumber_A1); ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_1,ADC_SocChanNumber_A0); //changed by xjw IA=ADCA0 ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_1,ADC_SocTrigSrc_EPWM1_ADCSOCA); ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_1,ADC_SocSampleDelay_9_cycles);
// EXT IB-FB //ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_2,ADC_SocChanNumber_B1); ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_2,ADC_SocChanNumber_A1); //changed by xjw IB=ADCA1 ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_2,ADC_SocTrigSrc_EPWM1_ADCSOCA); ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_2,ADC_SocSampleDelay_9_cycles);
// EXT IC-FB //ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_3,ADC_SocChanNumber_A3); ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_3,ADC_SocChanNumber_A2); //changed by xjw IC=ADCA2 ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_3,ADC_SocTrigSrc_EPWM1_ADCSOCA); ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_3,ADC_SocSampleDelay_9_cycles);
// ADC-Vhb1 //ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_4,ADC_SocChanNumber_B7); ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_4,ADC_SocChanNumber_A4); //changed by xjw UA=ADCA4 ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_4,ADC_SocTrigSrc_EPWM1_ADCSOCA); ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_4,ADC_SocSampleDelay_9_cycles);
// ADC-Vhb2 //ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_5,ADC_SocChanNumber_B6); ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_5,ADC_SocChanNumber_A5); //changed by xjw UB=ADCA5 ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_5,ADC_SocTrigSrc_EPWM1_ADCSOCA); ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_5,ADC_SocSampleDelay_9_cycles);
// ADC-Vhb3 //ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_6,ADC_SocChanNumber_B4); ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_6,ADC_SocChanNumber_A6); //changed by xjw UC=ADCA6 ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_6,ADC_SocTrigSrc_EPWM1_ADCSOCA); ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_6,ADC_SocSampleDelay_9_cycles);
// VDCBUS //ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_7,ADC_SocChanNumber_A7); ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_7,ADC_SocChanNumber_A3); //changed by xjw UDCBUS=ADCA3 ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_7,ADC_SocTrigSrc_EPWM1_ADCSOCA); ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_7,ADC_SocSampleDelay_9_cycles);
return;} // end of HAL_setupAdcs() function
void HAL_setupPwms(HAL_Handle handle, const uint_least16_t systemFreq_MHz, const float_t pwmPeriod_usec, const uint_least16_t numPwmTicksPerIsrTick){ HAL_Obj *obj = (HAL_Obj *)handle; uint16_t halfPeriod_cycles = (uint16_t)((float_t)systemFreq_MHz*pwmPeriod_usec) >> 1; uint_least8_t cnt;
// turns off the outputs of the EPWM peripherals which will put the power switches // into a high impedance state. PWM_setOneShotTrip(obj->pwmHandle[PWM_Number_1]); PWM_setOneShotTrip(obj->pwmHandle[PWM_Number_2]); PWM_setOneShotTrip(obj->pwmHandle[PWM_Number_3]);
for(cnt=0;cnt<3;cnt++) { // setup the Time-Base Control Register (TBCTL) PWM_setCounterMode(obj->pwmHandle[cnt],PWM_CounterMode_UpDown); PWM_disableCounterLoad(obj->pwmHandle[cnt]); PWM_setPeriodLoad(obj->pwmHandle[cnt],PWM_PeriodLoad_Immediate); PWM_setSyncMode(obj->pwmHandle[cnt],PWM_SyncMode_EPWMxSYNC); PWM_setHighSpeedClkDiv(obj->pwmHandle[cnt],PWM_HspClkDiv_by_1); PWM_setClkDiv(obj->pwmHandle[cnt],PWM_ClkDiv_by_1); PWM_setPhaseDir(obj->pwmHandle[cnt],PWM_PhaseDir_CountUp); PWM_setRunMode(obj->pwmHandle[cnt],PWM_RunMode_FreeRun);
// setup the Timer-Based Phase Register (TBPHS) PWM_setPhase(obj->pwmHandle[cnt],0);
// setup the Time-Base Counter Register (TBCTR) PWM_setCount(obj->pwmHandle[cnt],0);
// setup the Time-Base Period Register (TBPRD) // set to zero initially PWM_setPeriod(obj->pwmHandle[cnt],0);
// setup the Counter-Compare Control Register (CMPCTL) PWM_setLoadMode_CmpA(obj->pwmHandle[cnt],PWM_LoadMode_Zero); PWM_setLoadMode_CmpB(obj->pwmHandle[cnt],PWM_LoadMode_Zero); PWM_setShadowMode_CmpA(obj->pwmHandle[cnt],PWM_ShadowMode_Shadow); PWM_setShadowMode_CmpB(obj->pwmHandle[cnt],PWM_ShadowMode_Immediate);
// setup the Action-Qualifier Output A Register (AQCTLA) PWM_setActionQual_CntUp_CmpA_PwmA(obj->pwmHandle[cnt],PWM_ActionQual_Set); PWM_setActionQual_CntDown_CmpA_PwmA(obj->pwmHandle[cnt],PWM_ActionQual_Clear);
// setup the Dead-Band Generator Control Register (DBCTL) PWM_setDeadBandOutputMode(obj->pwmHandle[cnt],PWM_DeadBandOutputMode_EPWMxA_Rising_EPWMxB_Falling);// PWM_setDeadBandPolarity(obj->pwmHandle[cnt],PWM_DeadBandPolarity_EPWMxB_Inverted); PWM_setDeadBandPolarity(obj->pwmHandle[cnt],PWM_DeadBandPolarity_EPWMxA_Inverted); //changed by xjw
// setup the Dead-Band Rising Edge Delay Register (DBRED) PWM_setDeadBandRisingEdgeDelay(obj->pwmHandle[cnt],HAL_PWM_DBRED_CNT);
// setup the Dead-Band Falling Edge Delay Register (DBFED) PWM_setDeadBandFallingEdgeDelay(obj->pwmHandle[cnt],HAL_PWM_DBFED_CNT); // setup the PWM-Chopper Control Register (PCCTL) PWM_disableChopping(obj->pwmHandle[cnt]);
// setup the Trip Zone Select Register (TZSEL) PWM_disableTripZones(obj->pwmHandle[cnt]); }
// setup the Event Trigger Selection Register (ETSEL) PWM_disableInt(obj->pwmHandle[PWM_Number_1]); PWM_setSocAPulseSrc(obj->pwmHandle[PWM_Number_1],PWM_SocPulseSrc_CounterEqualZero); PWM_enableSocAPulse(obj->pwmHandle[PWM_Number_1]);
// setup the Event Trigger Prescale Register (ETPS) if(numPwmTicksPerIsrTick == 3) { PWM_setIntPeriod(obj->pwmHandle[PWM_Number_1],PWM_IntPeriod_ThirdEvent); PWM_setSocAPeriod(obj->pwmHandle[PWM_Number_1],PWM_SocPeriod_ThirdEvent); } else if(numPwmTicksPerIsrTick == 2) { PWM_setIntPeriod(obj->pwmHandle[PWM_Number_1],PWM_IntPeriod_SecondEvent); PWM_setSocAPeriod(obj->pwmHandle[PWM_Number_1],PWM_SocPeriod_SecondEvent); } else { PWM_setIntPeriod(obj->pwmHandle[PWM_Number_1],PWM_IntPeriod_FirstEvent); PWM_setSocAPeriod(obj->pwmHandle[PWM_Number_1],PWM_SocPeriod_FirstEvent); }
// setup the Event Trigger Clear Register (ETCLR) PWM_clearIntFlag(obj->pwmHandle[PWM_Number_1]); PWM_clearSocAFlag(obj->pwmHandle[PWM_Number_1]);
// first step to synchronize the pwms CLK_disableTbClockSync(obj->clkHandle);
// since the PWM is configured as an up/down counter, the period register is set to one-half // of the desired PWM period PWM_setPeriod(obj->pwmHandle[PWM_Number_1],halfPeriod_cycles); PWM_setPeriod(obj->pwmHandle[PWM_Number_2],halfPeriod_cycles); PWM_setPeriod(obj->pwmHandle[PWM_Number_3],halfPeriod_cycles);
// last step to synchronize the pwms CLK_enableTbClockSync(obj->clkHandle);
return;} // end of HAL_setupPwms() function





