TI工程师,你好
例子:默认为100kHz
#define PWM_PRD (60000/200) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
我这边需要修改为40kHz
#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
除了改这个地方,还需要修改哪些代码?
囧:
改这里就可以了,PWM_PRD在main.c的第490行,配置为PWM1的周期值。你还需要保证DEVICE_iNIT函数中 PLLset()是不是0x0C,即主时钟是不是60M。
TI工程师,你好
例子:默认为100kHz
#define PWM_PRD (60000/200) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
我这边需要修改为40kHz
#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
除了改这个地方,还需要修改哪些代码?
jinbin chen:
回复 囧:
1、 PLLset()是0x0C,只改这里#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
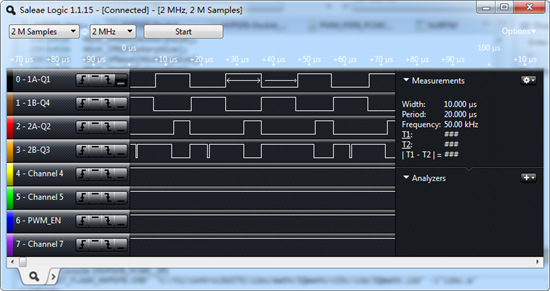
PWM1A、PWM1B输出40kHZ,波形正常
PWM2A、PWM2B输出波形不对,错乱了
2、修改PLLset()是0x0C这个值,PWM_PRD不改时,全部波形输出正常,频率也相应改变
是否还需要改动哪些参数?
TI工程师,你好
例子:默认为100kHz
#define PWM_PRD (60000/200) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
我这边需要修改为40kHz
#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
除了改这个地方,还需要修改哪些代码?
囧:
回复 jinbin chen:
PWM2的所有初始化代码和PWM1一样吗?
TI工程师,你好
例子:默认为100kHz
#define PWM_PRD (60000/200) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
我这边需要修改为40kHz
#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
除了改这个地方,还需要修改哪些代码?
囧:
回复 囧:
如以下源代码:
void PWMDRV_PSFB_PCMC_CNF(int16 n, int16 period, int16 SR_Enable, int16 Comp2_Prot){// n = the ePWM module number, i.e. selects the target module for init.// ePWM(n) init. Note EPWM(n) is the Master //Time Base SubModule Register (*ePWM[n]).TBCTL.bit.PRDLD = TB_IMMEDIATE; // Set Immediate load (*ePWM[n]).TBPRD = period; (*ePWM[n]).TBPHS.half.TBPHS = 0; (*ePWM[n]).TBCTR = 0;
(*ePWM[n]).TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; (*ePWM[n]).TBCTL.bit.PHSEN = TB_DISABLE; (*ePWM[n]).TBCTL.bit.SYNCOSEL = TB_CTR_ZERO; // Used to sync EPWM(n+1) "down-stream" (*ePWM[n]).TBCTL.bit.HSPCLKDIV = TB_DIV1; (*ePWM[n]).TBCTL.bit.CLKDIV = TB_DIV1;
// Counter compare submodule registers (*ePWM[n]).CMPCTL.bit.SHDWAMODE = CC_IMMEDIATE; (*ePWM[n]).CMPCTL.bit.SHDWBMODE = CC_IMMEDIATE; (*ePWM[n]).CMPA.half.CMPA = period-68; (*ePWM[n]).CMPB = period;
// Action Qualifier SubModule Registers (*ePWM[n]).AQCTLA.bit.ZRO = AQ_SET; (*ePWM[n]).AQCTLA.bit.PRD = AQ_CLEAR; // DeadBand Control Register (*ePWM[n]).DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; (*ePWM[n]).DBCTL.bit.POLSEL = DB_ACTV_HIC; // Active Hi Complimentary (*ePWM[n]).DBRED = 20; // Initial value (*ePWM[n]).DBFED = 20; // Initial value
// ePWM(n+1) init. EPWM(n+1) is a slave
//Time Base SubModule Register (*ePWM[n+1]).TBCTL.bit.PRDLD = TB_SHADOW; (*ePWM[n+1]).TBPRD = period-1; (*ePWM[n+1]).TBPHS.half.TBPHS = 0; (*ePWM[n+1]).TBCTR = 0;
(*ePWM[n+1]).TBCTL.bit.CTRMODE = TB_COUNT_UP; (*ePWM[n+1]).TBCTL.bit.PHSEN = TB_ENABLE; (*ePWM[n+1]).TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // Sync "flow through" mode (*ePWM[n+1]).TBCTL.bit.HSPCLKDIV = TB_DIV1; (*ePWM[n+1]).TBCTL.bit.CLKDIV = TB_DIV1;
// Counter compare submodule registers (*ePWM[n+1]).CMPA.half.CMPA = period + 10; // Initial value (*ePWM[n+1]).CMPB = 20; // Initial value (*ePWM[n+1]).CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; (*ePWM[n+1]).CMPCTL.bit.SHDWAMODE = CC_SHADOW; (*ePWM[n+1]).CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; (*ePWM[n+1]).CMPCTL.bit.SHDWBMODE = CC_SHADOW; // Action Qualifier SubModule Registers (*ePWM[n+1]).AQCTLA.bit.CAU = AQ_SET; (*ePWM[n+1]).AQCTLA.bit.CBU = AQ_CLEAR; (*ePWM[n+1]).AQCTLA.bit.ZRO = AQ_CLEAR; (*ePWM[n+1]).AQCTLA.bit.PRD = AQ_CLEAR;
(*ePWM[n+1]).AQCTLB.bit.CBU = AQ_SET; (*ePWM[n+1]).AQCTLB.bit.CAU = AQ_CLEAR; (*ePWM[n+1]).AQCTLB.bit.ZRO = AQ_CLEAR; (*ePWM[n+1]).AQCTLB.bit.PRD = AQ_CLEAR;
// Cycle-by-cycle shutdown mechanism configuration
EALLOW; //===========================================================================// Define an event (DCAEVT1) based on Comparator 1 Output (*ePWM[n+1]).DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT; // DCAH = Comparator 1 output (*ePWM[n+1]).TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI; // DCAEVT1 = DCAH high(will become active // as Comparator output goes high) (*ePWM[n+1]).DCACTL.bit.EVT1SRCSEL = DC_EVT_FLT; // DCAEVT1 = DC_EVT_FLT (filtered) (*ePWM[n+1]).DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC; // Take async path
// Enable DCAEVT1 as a one-shot source (*ePWM[n+1]).TZSEL.bit.DCAEVT1 = 1; // Enable One-Shot Trip
// Following code for the sync mechanism based on the same trigger event – COMPxOUT (*ePWM[n+1]).DCACTL.bit.EVT1SYNCE = 1; // Sync enabled
// What do we want the DCAEVT1 event to do? – Initial Configuration (*ePWM[n+1]).TZCTL.bit.TZA = TZ_NO_CHANGE; // EPWMxA – no change (*ePWM[n+1]).TZCTL.bit.TZB = TZ_FORCE_LO; // EPWMxB – go low
//===========================================================================// Event Filtering Configuration (*ePWM[n+1]).DCFCTL.bit.SRCSEL = DC_SRC_DCAEVT1; (*ePWM[n+1]).DCFCTL.bit.BLANKE = DC_BLANK_ENABLE; (*ePWM[n+1]).DCFCTL.bit.PULSESEL = DC_PULSESEL_ZERO;
(*ePWM[n+1]).DCFOFFSET = 2; // Blanking Window Offset = CMPA(n+1) (*ePWM[n+1]).DCFWINDOW = 4; // Blanking window length – initial value//=========================================================================== EDIS;
//Configure EPWM(n+2) time base for ADC SOC generation and syncing the DAC
//Time Base SubModule Register (*ePWM[n+2]).TBCTL.bit.PRDLD = TB_IMMEDIATE; (*ePWM[n+2]).TBPRD = period-1; (*ePWM[n+2]).TBPHS.half.TBPHS = period-35; (*ePWM[n+2]).TBCTR = 0;
(*ePWM[n+2]).TBCTL.bit.CTRMODE = TB_COUNT_UP; (*ePWM[n+2]).TBCTL.bit.PHSEN = TB_ENABLE; (*ePWM[n+2]).TBCTL.bit.PHSDIR = TB_UP; (*ePWM[n+2]).TBCTL.bit.HSPCLKDIV = TB_DIV1; (*ePWM[n+2]).TBCTL.bit.CLKDIV = TB_DIV1;
(*ePWM[n+2]).TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // Pass the Sync signal through to ePWM4
if (SR_Enable == 1) // PWM configuration for synchronous rectification {//Configure EPWM(n+3) for synchronous rectifier drive //Time Base SubModule Register (*ePWM[n+3]).TBCTL.bit.PRDLD = TB_IMMEDIATE; // Set Immediate load (*ePWM[n+3]).TBPRD = period-1; (*ePWM[n+3]).TBPHS.half.TBPHS = 0; (*ePWM[n+3]).TBCTR = 0;
(*ePWM[n+3]).TBCTL.bit.CTRMODE = TB_COUNT_UP; (*ePWM[n+3]).TBCTL.bit.PHSEN = TB_ENABLE; // Enabled for SR (*ePWM[n+3]).TBCTL.bit.PHSDIR = TB_UP; (*ePWM[n+3]).TBCTL.bit.HSPCLKDIV = TB_DIV1; (*ePWM[n+3]).TBCTL.bit.CLKDIV = TB_DIV1; // Counter compare submodule registers (*ePWM[n+3]).CMPB = 20; // Initial value (*ePWM[n+3]).CMPA.half.CMPA = period+10; // Initial value (*ePWM[n+3]).CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; (*ePWM[n+3]).CMPCTL.bit.SHDWAMODE = CC_SHADOW; (*ePWM[n+3]).CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; (*ePWM[n+3]).CMPCTL.bit.SHDWBMODE = CC_SHADOW;
// Action Qualifier SubModule Registers (*ePWM[n+3]).AQCTLA.bit.ZRO = AQ_CLEAR; (*ePWM[n+3]).AQCTLA.bit.CAU = AQ_CLEAR; (*ePWM[n+3]).AQCTLB.bit.ZRO = AQ_SET; (*ePWM[n+3]).AQCTLB.bit.CBU = AQ_CLEAR;
// Cycle-by-cycle syncing mechanism configuration
EALLOW; //===========================================================================// Define an event (DCAEVT1) based on Comparator 1 Output (*ePWM[n+3]).DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT; // DCAH = Comparator 1 output (*ePWM[n+3]).TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI; // DCAEVT1 = DCAH high(will become active // as Comparator output goes high) (*ePWM[n+3]).TZCTL.bit.DCAEVT1 = 3; // No action at the output on DCAEVT1 (*ePWM[n+3]).DCACTL.bit.EVT1SRCSEL = DC_EVT_FLT; // DCAEVT1 = DC_EVT_FLT (filtered) (*ePWM[n+3]).DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC; // Take async path
// Following code for the sync mechanism off of the same trigger event – COMPxOUT (*ePWM[n+3]).DCACTL.bit.EVT1SYNCE = 1; // Sync enabled
// Event Filtering Config (*ePWM[n+3]).DCFCTL.bit.SRCSEL = DC_SRC_DCAEVT1; (*ePWM[n+3]).DCFCTL.bit.BLANKE = DC_BLANK_ENABLE; (*ePWM[n+3]).DCFCTL.bit.PULSESEL = DC_PULSESEL_ZERO;
(*ePWM[n+3]).DCFOFFSET = 2; // Blanking Window Offset = CMPA(n+3) (*ePWM[n+3]).DCFWINDOW = 4; // Blanking window length – initial value
EDIS; } // End SR PWM configuration
// Over current shutdown mechanism configuration – using comparator 2//===========================================================================if (Comp2_Prot == 1) { EALLOW; // Define an event (DCAEVT1) based on Comparator 1 Output (*ePWM[n]).DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT; // DCAH = Comparator 2 output (*ePWM[n]).TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI; // DCAEVT1 = DCAH high(will become active // as Comparator output goes high) (*ePWM[n]).DCACTL.bit.EVT1SRCSEL = DC_EVT1; // DCAEVT1 = DCAEVT1 (not filtered) (*ePWM[n]).DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC; // Take async path
// Enable DCAEVT1 as a one-shot source (*ePWM[n]).TZSEL.bit.DCAEVT1 = 1;
// What do we want the DCAEVT1 event to do? (*ePWM[n]).TZCTL.bit.TZA = TZ_FORCE_LO; // EPWMxA will go low (*ePWM[n]).TZCTL.bit.TZB = TZ_FORCE_LO; // EPWMxB will go low EDIS; }//===========================================================================
// ADC SOC generation//===========================================================================// SOC generation using PWM(n) – 1st of 4 Vout conversions in one half cycle (*ePWM[n]).ETSEL.bit.SOCAEN = 1; (*ePWM[n]).ETSEL.bit.SOCASEL = ET_CTR_PRDZERO; // Use ZRO and PRD events as trigger (*ePWM[n]).ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event
// SOC generation using PWM(n+1) – Iout conversion (*ePWM[n+1]).ETSEL.bit.SOCAEN = 1; (*ePWM[n+1]).ETSEL.bit.SOCASEL = ET_CTR_ZERO; // Use ZRO event as trigger (*ePWM[n+1]).ETPS.bit.SOCAPRD = ET_2ND; // Generate pulse on 1st event
// SOC generation using PWM(n+2) – 2nd, 3rd and 4th Vout conversions in one half cycle; Vin and Ipri conversions (*ePWM[n+2]).ETSEL.bit.SOCAEN = 1; (*ePWM[n+2]).ETSEL.bit.SOCASEL = ET_CTRU_CMPA; // Use CAU event as trigger (*ePWM[n+2]).ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event (*ePWM[n+2]).CMPA.half.CMPA = 40; // Note: This value is based on 100 KHz switching frequency
(*ePWM[n+2]).ETSEL.bit.SOCBEN = 1; (*ePWM[n+2]).ETSEL.bit.SOCBSEL = ET_CTRU_CMPB; // Use CBU event as trigger (*ePWM[n+2]).ETPS.bit.SOCBPRD = 1; // Generate pulse on 1st event (*ePWM[n+2]).CMPB = 165; // Note: This value is based on 100 KHz switching frequency
} // END
源程序中调用这个函数初始化PWM,从以上红色部分代码可以看出,PWM1和PWM2的时基技术模式是不一样的,PWM1是增减技术,PWM2是单增计数,所以PWM1的周期理论上应该是PWM2的一半,因为是相移全桥,PWM2主要控制SR,所以被PWM1同步。您现在对代码做了哪些修改,贴出来看一下,可以找到原因。
TI工程师,你好
例子:默认为100kHz
#define PWM_PRD (60000/200) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
我这边需要修改为40kHz
#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
除了改这个地方,还需要修改哪些代码?
jinbin chen:
回复 囧:
//—————————————————————————void PWMDRV_PSFB_PCMC_CNF(int16 n, int16 period, int16 SR_Enable, int16 Comp2_Prot){// n = the ePWM module number, i.e. selects the target module for init.// ePWM(n) init. Note EPWM(n) is the Master
//Time Base SubModule Register (*ePWM[n]).TBCTL.bit.PRDLD = TB_IMMEDIATE; // Set Immediate load (*ePWM[n]).TBPRD = period; (*ePWM[n]).TBPHS.half.TBPHS = 0; (*ePWM[n]).TBCTR = 0;
(*ePWM[n]).TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; (*ePWM[n]).TBCTL.bit.PHSEN = TB_DISABLE; (*ePWM[n]).TBCTL.bit.SYNCOSEL = TB_CTR_CMPB; // Used to sync EPWM(n+1) "down-stream" (*ePWM[n]).TBCTL.bit.HSPCLKDIV = TB_DIV1; (*ePWM[n]).TBCTL.bit.CLKDIV = TB_DIV1;
// Counter compare submodule registers (*ePWM[n]).CMPCTL.bit.SHDWAMODE = CC_IMMEDIATE; (*ePWM[n]).CMPCTL.bit.SHDWBMODE = CC_IMMEDIATE; (*ePWM[n]).CMPA.half.CMPA = period-68; (*ePWM[n]).CMPB = period;
// Action Qualifier SubModule Registers (*ePWM[n]).AQCTLA.bit.ZRO = AQ_SET; (*ePWM[n]).AQCTLA.bit.PRD = AQ_CLEAR;
// DeadBand Control Register (*ePWM[n]).DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; (*ePWM[n]).DBCTL.bit.POLSEL = DB_ACTV_HIC; // Active Hi Complimentary (*ePWM[n]).DBRED = 20; // Initial value (*ePWM[n]).DBFED = 20; // Initial value
// ePWM(n+1) init. EPWM(n+1) is a slave
//Time Base SubModule Register (*ePWM[n+1]).TBCTL.bit.PRDLD = TB_SHADOW; (*ePWM[n+1]).TBPRD = period-1; (*ePWM[n+1]).TBPHS.half.TBPHS = 0; (*ePWM[n+1]).TBCTR = 0;
(*ePWM[n+1]).TBCTL.bit.CTRMODE = TB_COUNT_UP; (*ePWM[n+1]).TBCTL.bit.PHSEN = TB_ENABLE; (*ePWM[n+1]).TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // Sync "flow through" mode (*ePWM[n+1]).TBCTL.bit.HSPCLKDIV = TB_DIV1; (*ePWM[n+1]).TBCTL.bit.CLKDIV = TB_DIV1;
// Counter compare submodule registers (*ePWM[n+1]).CMPA.half.CMPA = period + 10; // Initial value (*ePWM[n+1]).CMPB = 20; // Initial value (*ePWM[n+1]).CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; (*ePWM[n+1]).CMPCTL.bit.SHDWAMODE = CC_SHADOW; (*ePWM[n+1]).CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; (*ePWM[n+1]).CMPCTL.bit.SHDWBMODE = CC_SHADOW;
// Action Qualifier SubModule Registers (*ePWM[n+1]).AQCTLA.bit.CAU = AQ_SET; (*ePWM[n+1]).AQCTLA.bit.CBU = AQ_CLEAR; (*ePWM[n+1]).AQCTLA.bit.ZRO = AQ_CLEAR; (*ePWM[n+1]).AQCTLA.bit.PRD = AQ_CLEAR;
(*ePWM[n+1]).AQCTLB.bit.CBU = AQ_SET; (*ePWM[n+1]).AQCTLB.bit.CAU = AQ_CLEAR; (*ePWM[n+1]).AQCTLB.bit.ZRO = AQ_CLEAR; (*ePWM[n+1]).AQCTLB.bit.PRD = AQ_CLEAR;
// Cycle-by-cycle shutdown mechanism configuration
EALLOW;//===========================================================================// Define an event (DCAEVT1) based on Comparator 1 Output (*ePWM[n+1]).DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT; // DCAH = Comparator 1 output (*ePWM[n+1]).TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI; // DCAEVT1 = DCAH high(will become active // as Comparator output goes high) (*ePWM[n+1]).DCACTL.bit.EVT1SRCSEL = DC_EVT_FLT; // DCAEVT1 = DC_EVT_FLT (filtered) (*ePWM[n+1]).DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC; // Take async path
// Enable DCAEVT1 as a one-shot source (*ePWM[n+1]).TZSEL.bit.DCAEVT1 = 1; // Enable One-Shot Trip
// Following code for the sync mechanism based on the same trigger event – COMPxOUT (*ePWM[n+1]).DCACTL.bit.EVT1SYNCE = 1; // Sync enabled
// What do we want the DCAEVT1 event to do? – Initial Configuration (*ePWM[n+1]).TZCTL.bit.TZA = TZ_NO_CHANGE; // EPWMxA – no change (*ePWM[n+1]).TZCTL.bit.TZB = TZ_FORCE_LO; // EPWMxB – go low
//===========================================================================// Event Filtering Configuration (*ePWM[n+1]).DCFCTL.bit.SRCSEL = DC_SRC_DCAEVT1; (*ePWM[n+1]).DCFCTL.bit.BLANKE = DC_BLANK_ENABLE; (*ePWM[n+1]).DCFCTL.bit.PULSESEL = DC_PULSESEL_ZERO;
(*ePWM[n+1]).DCFOFFSET = 2; // Blanking Window Offset = CMPA(n+1) (*ePWM[n+1]).DCFWINDOW = 4; // Blanking window length – initial value//=========================================================================== EDIS;
//Configure EPWM(n+2) time base for ADC SOC generation and syncing the DAC
//Time Base SubModule Register (*ePWM[n+2]).TBCTL.bit.PRDLD = TB_IMMEDIATE; (*ePWM[n+2]).TBPRD = period-1; (*ePWM[n+2]).TBPHS.half.TBPHS = period-35; (*ePWM[n+2]).TBCTR = 0;
(*ePWM[n+2]).TBCTL.bit.CTRMODE = TB_COUNT_UP; (*ePWM[n+2]).TBCTL.bit.PHSEN = TB_ENABLE; (*ePWM[n+2]).TBCTL.bit.PHSDIR = TB_UP; (*ePWM[n+2]).TBCTL.bit.HSPCLKDIV = TB_DIV1; (*ePWM[n+2]).TBCTL.bit.CLKDIV = TB_DIV1;
(*ePWM[n+2]).TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // Pass the Sync signal through to ePWM4
if (SR_Enable == 1) // PWM configuration for synchronous rectification {//Configure EPWM(n+3) for synchronous rectifier drive //Time Base SubModule Register (*ePWM[n+3]).TBCTL.bit.PRDLD = TB_IMMEDIATE; // Set Immediate load (*ePWM[n+3]).TBPRD = period-1; (*ePWM[n+3]).TBPHS.half.TBPHS = 0; (*ePWM[n+3]).TBCTR = 0;
(*ePWM[n+3]).TBCTL.bit.CTRMODE = TB_COUNT_UP; (*ePWM[n+3]).TBCTL.bit.PHSEN = TB_ENABLE; // Enabled for SR (*ePWM[n+3]).TBCTL.bit.PHSDIR = TB_UP; (*ePWM[n+3]).TBCTL.bit.HSPCLKDIV = TB_DIV1; (*ePWM[n+3]).TBCTL.bit.CLKDIV = TB_DIV1;
// Counter compare submodule registers (*ePWM[n+3]).CMPB = 20; // Initial value (*ePWM[n+3]).CMPA.half.CMPA = period+10; // Initial value (*ePWM[n+3]).CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; (*ePWM[n+3]).CMPCTL.bit.SHDWAMODE = CC_SHADOW; (*ePWM[n+3]).CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; (*ePWM[n+3]).CMPCTL.bit.SHDWBMODE = CC_SHADOW;
// Action Qualifier SubModule Registers (*ePWM[n+3]).AQCTLA.bit.ZRO = AQ_CLEAR; (*ePWM[n+3]).AQCTLA.bit.CAU = AQ_CLEAR; (*ePWM[n+3]).AQCTLB.bit.ZRO = AQ_SET; (*ePWM[n+3]).AQCTLB.bit.CBU = AQ_CLEAR;
// Cycle-by-cycle syncing mechanism configuration
EALLOW;//===========================================================================// Define an event (DCAEVT1) based on Comparator 1 Output (*ePWM[n+3]).DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP1OUT; // DCAH = Comparator 1 output (*ePWM[n+3]).TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI; // DCAEVT1 = DCAH high(will become active // as Comparator output goes high) (*ePWM[n+3]).TZCTL.bit.DCAEVT1 = 3; // No action at the output on DCAEVT1 (*ePWM[n+3]).DCACTL.bit.EVT1SRCSEL = DC_EVT_FLT; // DCAEVT1 = DC_EVT_FLT (filtered) (*ePWM[n+3]).DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC; // Take async path
// Following code for the sync mechanism off of the same trigger event – COMPxOUT (*ePWM[n+3]).DCACTL.bit.EVT1SYNCE = 1; // Sync enabled
// Event Filtering Config (*ePWM[n+3]).DCFCTL.bit.SRCSEL = DC_SRC_DCAEVT1; (*ePWM[n+3]).DCFCTL.bit.BLANKE = DC_BLANK_ENABLE; (*ePWM[n+3]).DCFCTL.bit.PULSESEL = DC_PULSESEL_ZERO;
(*ePWM[n+3]).DCFOFFSET = 2; // Blanking Window Offset = CMPA(n+3) (*ePWM[n+3]).DCFWINDOW = 4; // Blanking window length – initial value
EDIS; } // End SR PWM configuration
// Over current shutdown mechanism configuration – using comparator 2//===========================================================================if (Comp2_Prot == 1) { EALLOW;// Define an event (DCAEVT1) based on Comparator 1 Output (*ePWM[n]).DCTRIPSEL.bit.DCAHCOMPSEL = DC_COMP2OUT; // DCAH = Comparator 2 output (*ePWM[n]).TZDCSEL.bit.DCAEVT1 = TZ_DCAH_HI; // DCAEVT1 = DCAH high(will become active // as Comparator output goes high) (*ePWM[n]).DCACTL.bit.EVT1SRCSEL = DC_EVT1; // DCAEVT1 = DCAEVT1 (not filtered) (*ePWM[n]).DCACTL.bit.EVT1FRCSYNCSEL = DC_EVT_ASYNC; // Take async path
// Enable DCAEVT1 as a one-shot source (*ePWM[n]).TZSEL.bit.DCAEVT1 = 1; (*ePWM[n]).TZSEL.bit.OSHT2=1; //TZ2触发 (*ePWM[n+1]).TZSEL.bit.OSHT2=1; //TZ2触发// What do we want the DCAEVT1 event to do? (*ePWM[n+1]).TZCTL.bit.TZA = TZ_FORCE_LO; // EPWMxA will go low (*ePWM[n+1]).TZCTL.bit.TZB = TZ_FORCE_LO; // EPWMxB will go low (*ePWM[n]).TZCTL.bit.TZA = TZ_FORCE_LO; // EPWMxA will go low (*ePWM[n]).TZCTL.bit.TZB = TZ_FORCE_LO; // EPWMxB will go low EDIS; }//===========================================================================
// ADC SOC generation//===========================================================================// SOC generation using PWM(n) – 1st of 4 Vout conversions in one half cycle (*ePWM[n]).ETSEL.bit.SOCAEN = 1; (*ePWM[n]).ETSEL.bit.SOCASEL = ET_CTR_PRDZERO; // Use ZRO and PRD events as trigger (*ePWM[n]).ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event
// SOC generation using PWM(n+1) – Iout conversion (*ePWM[n+1]).ETSEL.bit.SOCAEN = 1; (*ePWM[n+1]).ETSEL.bit.SOCASEL = ET_CTR_ZERO; // Use ZRO event as trigger (*ePWM[n+1]).ETPS.bit.SOCAPRD = ET_2ND; // Generate pulse on 1st event
// SOC generation using PWM(n+2) – 2nd, 3rd and 4th Vout conversions in one half cycle; Vin and Ipri conversions (*ePWM[n+2]).ETSEL.bit.SOCAEN = 1; (*ePWM[n+2]).ETSEL.bit.SOCASEL = ET_CTRU_CMPA; // Use CAU event as trigger (*ePWM[n+2]).ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event (*ePWM[n+2]).CMPA.half.CMPA = 40; // Note: This value is based on 100 KHz switching frequency
(*ePWM[n+2]).ETSEL.bit.SOCBEN = 1; (*ePWM[n+2]).ETSEL.bit.SOCBSEL = ET_CTRU_CMPB; // Use CBU event as trigger (*ePWM[n+2]).ETPS.bit.SOCBPRD = 1; // Generate pulse on 1st event (*ePWM[n+2]).CMPB = 165; // Note: This value is based on 100 KHz switching frequency
} // END
加了红色哪些,其他没有修改
TI工程师,你好
例子:默认为100kHz
#define PWM_PRD (60000/200) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
我这边需要修改为40kHz
#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
除了改这个地方,还需要修改哪些代码?
囧:
回复 jinbin chen:
初始化没有问题,但是这个例程没有开环模式,bulidlevel1也会单跑一个电流过限触发的闭环(峰值电流模式)。频率的更改肯定生效的,
因为整个代码中就只有490行,有一个初始化使用这个频率的定义,:PWMDRV_PSFB_PCMC_CNF(1, PWM_PRD, 1, 1);// ePWM1 and ePWM2, Period=PWM_PRD, SR_Enable=1, Comp2_Prot=1
并且初始化中PWM2的Compa = period + 10 ,所以看不出duty,如果环路跑起来,Duty就会完全乱掉。Jibicompb是用来触发ADCSOC
所以如果不带功率安装现在的初始化情况应该不会有Duty,你现在的测试环境是怎么样的?
TI工程师,你好
例子:默认为100kHz
#define PWM_PRD (60000/200) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
我这边需要修改为40kHz
#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
除了改这个地方,还需要修改哪些代码?
jinbin chen:
回复 囧:
修改 #define PWM_PRD (60000/100) , 频率50kHz,PWM1A、PWM1B输出没问题
TI工程师,你好
例子:默认为100kHz
#define PWM_PRD (60000/200) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
我这边需要修改为40kHz
#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
除了改这个地方,还需要修改哪些代码?
jinbin chen:
回复 囧:
问题已解决:
1、修改HVPSFB-DPL-ISR.asm文件中PWM_PRD .set (60000/80) ; Period count = 100 KHz @ 60 MHz (Up-Down count mode)
2、修改HVPSFB-Main.c文件中#define PWM_PRD (60000/80) // Period count = 300 corresponding to 40 KHz @ 60 MHz (Up-Down count mode)
以上两处都需要改。
TI工程师,你好
例子:默认为100kHz
#define PWM_PRD (60000/200) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
我这边需要修改为40kHz
#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
除了改这个地方,还需要修改哪些代码?
Yunpeng Qi:
回复 jinbin chen:
您好,我是一名学生,现在急需PCMCIA和vmc的代码,请问您能把代码发给我吗?我的邮箱是88591034@qq.com,实在是找不到了 ,希望您能帮助。
TI工程师,你好
例子:默认为100kHz
#define PWM_PRD (60000/200) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
我这边需要修改为40kHz
#define PWM_PRD (60000/80) // Period count = 300 corresponding to 100 KHz @ 60 MHz (Up-Down count mode)
除了改这个地方,还需要修改哪些代码?
Yunpeng Qi:
回复 囧:
您好,我是一名学生,现在急需PCMCIA和vmc的代码,请问您能把代码发给我吗?我的邮箱是88591034@qq.com,实在是找不到了 ,希望您能帮助。





