大家好,目前在做直流无刷转速电流双闭环调速,遇到了一个问题,电机在低速的时候抖动,高速的时候动态响应还是可以的,
控制电路、驱动电路、代码、上位机程序是自己弄的,处理器TMS320F2812
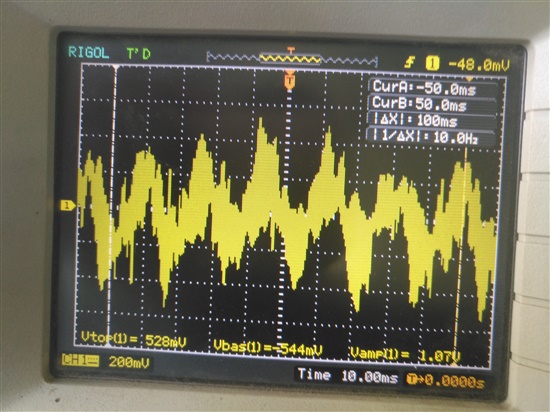
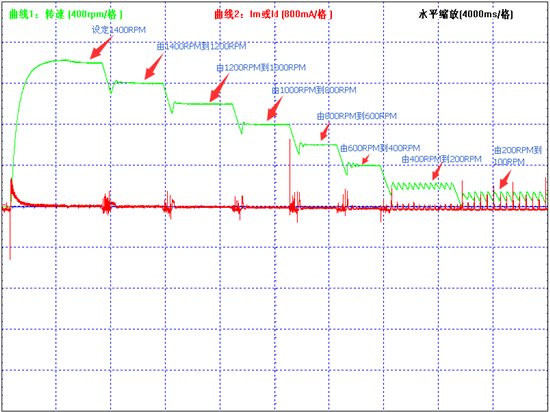
我测试的电机转速及母线电流的动态响应如下图所示:
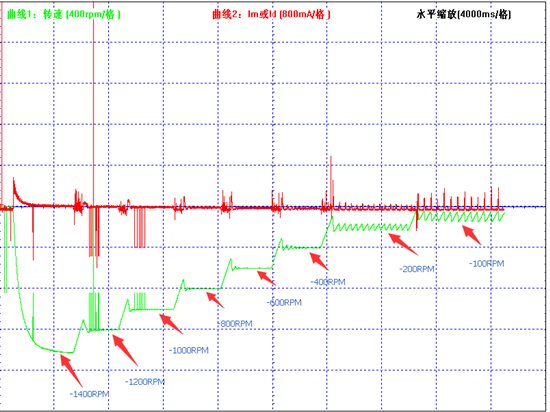
反转情况类似:
以上曲线的中的比较大的尖峰是上位机软件设计问题,有丢包的,大家暂时忽略吧。
实验时,采用单相不可控整流,调压器输出AC:200V。无刷机是5对极的,功率200W左右。
从上述曲线中可以看出,转速到达200RPM的时候可是出现周期性的震荡,高速时动态响应正常;
当震荡出现时,我试着降低调压器输出,最终电机也是可以达到稳态的,且与设定值一致,可以达到闭环控制的效果,由此看来,感觉不像是PI参数的问题。
不过,我的算法中确实只有一组PI参数。
请问直流无刷电机转速电流双闭环控制时需要考虑母线电压吗?
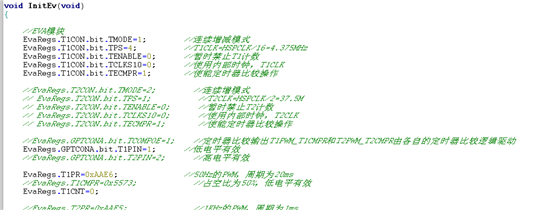
算法结构描述如下:
1. 设置5KHz的timer,timer周期中断启动ADC;
2. 使能捕获中断,在捕获中断中做换相处理;
3. 使能ADC中断,在ADC中断中作数据采集及双闭环算法控制
采集母线电流,用的电流传感器;闭环转速计算没有用霍尔传感器做,用的2048线光电编码器
大家也帮我检查下算法结构有问题吗?
多谢!!!
rookiecalf:
低速的时候都会有点难。你的现象可能跟数据的运算精度有点关系,因为母线电压降下来后,相对而言可调节的pwm脉宽将增加。而母线电压高的话,可能输出脉宽比较窄,你可以调试的时候,看一下epwm的比较值变化范围,以做判定。
大家好,目前在做直流无刷转速电流双闭环调速,遇到了一个问题,电机在低速的时候抖动,高速的时候动态响应还是可以的,
控制电路、驱动电路、代码、上位机程序是自己弄的,处理器TMS320F2812
我测试的电机转速及母线电流的动态响应如下图所示:
反转情况类似:
以上曲线的中的比较大的尖峰是上位机软件设计问题,有丢包的,大家暂时忽略吧。
实验时,采用单相不可控整流,调压器输出AC:200V。无刷机是5对极的,功率200W左右。
从上述曲线中可以看出,转速到达200RPM的时候可是出现周期性的震荡,高速时动态响应正常;
当震荡出现时,我试着降低调压器输出,最终电机也是可以达到稳态的,且与设定值一致,可以达到闭环控制的效果,由此看来,感觉不像是PI参数的问题。
不过,我的算法中确实只有一组PI参数。
请问直流无刷电机转速电流双闭环控制时需要考虑母线电压吗?
算法结构描述如下:
1. 设置5KHz的timer,timer周期中断启动ADC;
2. 使能捕获中断,在捕获中断中做换相处理;
3. 使能ADC中断,在ADC中断中作数据采集及双闭环算法控制
采集母线电流,用的电流传感器;闭环转速计算没有用霍尔传感器做,用的2048线光电编码器
大家也帮我检查下算法结构有问题吗?
多谢!!!
mangui zhang:
你的驱动器的最佳工作频率知道吗 根据驱动器的要求设置最佳频率工作
大家好,目前在做直流无刷转速电流双闭环调速,遇到了一个问题,电机在低速的时候抖动,高速的时候动态响应还是可以的,
控制电路、驱动电路、代码、上位机程序是自己弄的,处理器TMS320F2812
我测试的电机转速及母线电流的动态响应如下图所示:
反转情况类似:
以上曲线的中的比较大的尖峰是上位机软件设计问题,有丢包的,大家暂时忽略吧。
实验时,采用单相不可控整流,调压器输出AC:200V。无刷机是5对极的,功率200W左右。
从上述曲线中可以看出,转速到达200RPM的时候可是出现周期性的震荡,高速时动态响应正常;
当震荡出现时,我试着降低调压器输出,最终电机也是可以达到稳态的,且与设定值一致,可以达到闭环控制的效果,由此看来,感觉不像是PI参数的问题。
不过,我的算法中确实只有一组PI参数。
请问直流无刷电机转速电流双闭环控制时需要考虑母线电压吗?
算法结构描述如下:
1. 设置5KHz的timer,timer周期中断启动ADC;
2. 使能捕获中断,在捕获中断中做换相处理;
3. 使能ADC中断,在ADC中断中作数据采集及双闭环算法控制
采集母线电流,用的电流传感器;闭环转速计算没有用霍尔传感器做,用的2048线光电编码器
大家也帮我检查下算法结构有问题吗?
多谢!!!
mangui zhang:
你的驱动器的最佳工作频率知道吗 根据驱动器的要求设置最佳频率工作
大家好,目前在做直流无刷转速电流双闭环调速,遇到了一个问题,电机在低速的时候抖动,高速的时候动态响应还是可以的,
控制电路、驱动电路、代码、上位机程序是自己弄的,处理器TMS320F2812
我测试的电机转速及母线电流的动态响应如下图所示:
反转情况类似:
以上曲线的中的比较大的尖峰是上位机软件设计问题,有丢包的,大家暂时忽略吧。
实验时,采用单相不可控整流,调压器输出AC:200V。无刷机是5对极的,功率200W左右。
从上述曲线中可以看出,转速到达200RPM的时候可是出现周期性的震荡,高速时动态响应正常;
当震荡出现时,我试着降低调压器输出,最终电机也是可以达到稳态的,且与设定值一致,可以达到闭环控制的效果,由此看来,感觉不像是PI参数的问题。
不过,我的算法中确实只有一组PI参数。
请问直流无刷电机转速电流双闭环控制时需要考虑母线电压吗?
算法结构描述如下:
1. 设置5KHz的timer,timer周期中断启动ADC;
2. 使能捕获中断,在捕获中断中做换相处理;
3. 使能ADC中断,在ADC中断中作数据采集及双闭环算法控制
采集母线电流,用的电流传感器;闭环转速计算没有用霍尔传感器做,用的2048线光电编码器
大家也帮我检查下算法结构有问题吗?
多谢!!!
user78960159:
回复 rookiecalf:
好的 谢谢 我看下寄存器值
如果是这个问题该怎么解决呢?
开始我以为是转速环PI控制器控制滞后造成的,因为电流时瞬态量,所以每次进到AD中断中都会进行内环控制
而转速是惯性量,所以不是每次进入到AD中断中都需要调用外环控制
我试着之后外环的控制时间,进入到ADC中断中设置了一个计数器,达到一定计数值在调用外环控制,但是发现
延后的时间越多,好像震荡会更厉害,这个现象你看会有什么问题呢,是不是还是我的算法结构不合理呢??
大家好,目前在做直流无刷转速电流双闭环调速,遇到了一个问题,电机在低速的时候抖动,高速的时候动态响应还是可以的,
控制电路、驱动电路、代码、上位机程序是自己弄的,处理器TMS320F2812
我测试的电机转速及母线电流的动态响应如下图所示:
反转情况类似:
以上曲线的中的比较大的尖峰是上位机软件设计问题,有丢包的,大家暂时忽略吧。
实验时,采用单相不可控整流,调压器输出AC:200V。无刷机是5对极的,功率200W左右。
从上述曲线中可以看出,转速到达200RPM的时候可是出现周期性的震荡,高速时动态响应正常;
当震荡出现时,我试着降低调压器输出,最终电机也是可以达到稳态的,且与设定值一致,可以达到闭环控制的效果,由此看来,感觉不像是PI参数的问题。
不过,我的算法中确实只有一组PI参数。
请问直流无刷电机转速电流双闭环控制时需要考虑母线电压吗?
算法结构描述如下:
1. 设置5KHz的timer,timer周期中断启动ADC;
2. 使能捕获中断,在捕获中断中做换相处理;
3. 使能ADC中断,在ADC中断中作数据采集及双闭环算法控制
采集母线电流,用的电流传感器;闭环转速计算没有用霍尔传感器做,用的2048线光电编码器
大家也帮我检查下算法结构有问题吗?
多谢!!!
user78960159:
回复 mangui zhang:
驱动器的最佳工作频率是指?
我的驱动器型号是IRS2336D
IGBT型号是IRGIB10B60KD1
大家好,目前在做直流无刷转速电流双闭环调速,遇到了一个问题,电机在低速的时候抖动,高速的时候动态响应还是可以的,
控制电路、驱动电路、代码、上位机程序是自己弄的,处理器TMS320F2812
我测试的电机转速及母线电流的动态响应如下图所示:
反转情况类似:
以上曲线的中的比较大的尖峰是上位机软件设计问题,有丢包的,大家暂时忽略吧。
实验时,采用单相不可控整流,调压器输出AC:200V。无刷机是5对极的,功率200W左右。
从上述曲线中可以看出,转速到达200RPM的时候可是出现周期性的震荡,高速时动态响应正常;
当震荡出现时,我试着降低调压器输出,最终电机也是可以达到稳态的,且与设定值一致,可以达到闭环控制的效果,由此看来,感觉不像是PI参数的问题。
不过,我的算法中确实只有一组PI参数。
请问直流无刷电机转速电流双闭环控制时需要考虑母线电压吗?
算法结构描述如下:
1. 设置5KHz的timer,timer周期中断启动ADC;
2. 使能捕获中断,在捕获中断中做换相处理;
3. 使能ADC中断,在ADC中断中作数据采集及双闭环算法控制
采集母线电流,用的电流传感器;闭环转速计算没有用霍尔传感器做,用的2048线光电编码器
大家也帮我检查下算法结构有问题吗?
多谢!!!
Eric Ma:
我倒觉得是跟PI参数有关,你有没有调整过。
母线电压补偿算法一般会提高动态效果,但要消除震荡现在,我觉得还是修正一下PI参数。
ERIC